视觉检测中齿轮外轮廓分段方法研究*
2016-10-29段振云赵文辉
王 宁,段振云,赵文辉,孙 禾,2
(1.沈阳工业大学 机械工程学院,沈阳 110870;2.辽宁科技学院 电气与信息工程学院,辽宁 本溪117000)
视觉检测中齿轮外轮廓分段方法研究*
王宁1,段振云1,赵文辉1,孙禾1,2
(1.沈阳工业大学 机械工程学院,沈阳110870;2.辽宁科技学院 电气与信息工程学院,辽宁 本溪117000)
在基于机器视觉的齿轮测量过程中,由于齿轮外轮廓各部分的形状、精度以及测量要求均不相同,需要对齿顶、齿廓和齿根分别进行数据处理,因此齿轮外轮廓分段至关重要。针对机器视觉系统测量视野小,单幅图像只能包含齿轮部分轮齿的问题,提出一种齿轮外轮廓分段方法。通过八邻域边缘追踪法提取齿轮外轮廓边缘,对该边缘进行最小二乘法圆拟合确定半径,并进行直线拟合确定齿轮中心逼近方向,经多次拟合后,逐渐逼近齿轮中心。齿轮中心确定后,实现对齿轮齿顶、齿廓和齿根部分的分段。实验结果表明,该方法可以确定齿轮中心,实现对齿轮外轮廓分段,程序简单,可操作性强,有利于提高系统的测量精度。
视觉检测;齿轮分段;八邻域追踪;最小二乘法;齿轮中心
0 引言
中小模数齿轮常用于各种机械传动装置中,其精度直接影响装置的性能,因此对它的各项误差的测量就显得尤为重要。随着计算机技术的快速发展,基于图像处理的视觉检测方法在工业生产中得到广泛应用,它具有非接触、速度高、信息量丰富等诸多优点,因此将机器视觉检测方法应用到齿轮检测过程中可大大提高检测精度和效率[1-2]。
在视觉检测中,边缘提取得到的是一系列离散的点,边缘拟合是将离散点按照一定的法则和算法联系起来,组成能够测量的规则形状。对于中小模数齿轮外轮廓,由于其各部分的形状、精度以及测量要求均不相同,需要对齿顶、齿廓和齿根分别进行边缘拟合,以此来提高测量精度,这就要求将提取的齿轮外轮廓边缘数据进行分段。本文提出一种齿轮外轮廓分段方法,实现对齿轮边缘的齿顶、齿廓和齿根的分段。
1 图像边缘提取
视觉检测中实现对齿轮外轮廓的分段,不仅与齿轮中心确定算法有关,也与齿轮边缘提取算法息息相关。由于在采集、传输等过程之后,通常会产生一些噪声,对后续的处理结果产生很大影响,因此齿轮图像获取后,要对原始图像进行预处理,以便消除噪声,通过综合比较,本文测量系统采用高斯滤波进行去噪处理。由于边缘是图像灰度在空间发生突变或者在梯度方向上发生突变的像素集合,采用3×3的Sobel算子计算图像的梯度幅值[3],确定适当的阈值T,利用边缘追踪法进行边缘提取。本文采用八邻域边缘追踪法,可以得到齿轮的单像素边缘,其方法如下:
(1)逐行扫描每个像素点的梯度值,若梯度值f(i,j)≥T,则认为(xi,yi)为边缘的起始点,记下坐标位置,并对其进行标记,避免重复追踪,假设起始点为P0,追踪过程如图1所示。

图1 边缘追踪示意图
(2)在以该起始点P0为中心的八邻域内寻找梯度值最大点,认为该点就是图像的下一边缘点,记下坐标位置,进行标记,并以该点作为起点继续追踪。在图1中假设下一边缘点为P1,根据现有的两个边缘点P0、P1和单像素边缘的特点,可知下一边缘点不可能为P2和P8,因此可将这两个点的梯度值清零,在以P1为中心的八邻域内寻找梯度值最大点时,只需在P9至P13这五个点中寻找梯度值最大点,该点即为下一边缘点,大大减小了运算量。
(3)当所找到的边缘点位于图像的边界或者起始点,则边缘提取结束,否则重复步骤(2)。
2 齿轮中心确定方法
2.1现有齿轮中心确定方法
与传统的接触式测量方法不同,基于机器视觉的检测方法需要先确定齿轮中心作为基准,因此齿轮中心的确定直接影响齿轮参数的测量精度[4]。在现有的机器视觉检测方法中,齿轮轴孔一般为圆形,又分为不带键槽的光孔和带键槽孔两类,齿轮轴孔圆心即为齿轮的中心。通过边缘提取算法确定齿轮轴孔的边缘,采用重心法、最小二乘法圆拟合及Hough变换法确定圆心坐标[5-6]。对于不带键槽的光孔的齿轮,采用重心法比较简单;而对于带键槽的直齿圆柱齿轮,圆心坐标的检测则可以用最小二乘法的圆拟合法和Hough变换圆检测算法[7-8]。
2.2最小二乘逼近的齿轮中心确定方法
现有的齿轮中心确定方法都是针对一幅完整齿轮图像的,由于测量系统视野小,得到的齿轮图像不包括齿轮的轴孔,如图2所示,则不能用现有方法确定齿轮中心。

图2 齿轮部分图像
在中小模数齿轮的测量系统中用于检测的最基本数学模型就是直线和圆[9]。因此采用最小二乘法圆拟合和直线拟合相结合,并逐次逼近的方法来确定齿轮中心。
对于提取的齿轮边缘数据,首先进行最小二乘法圆拟合,得到拟合圆心和半径,此时的拟合圆心不是齿轮中心,因此将齿轮边缘数据再进行一次直线拟合,齿轮的理论中心一定通过拟合圆心与直线的垂线上,沿该方向逼近实际齿轮中心,得到新的逼近中心,计算齿轮边缘坐标点到逼近中心的距离,理论上距离最大点所对应的坐标点就是齿轮齿顶,但是由于加工误差等原因,齿顶有可能凸起或下凹,因此将距离最大值和略小于距离最大值所对应的边缘坐标点都保留,重复进行最小二乘法圆拟合和直线拟合,在这个过程中,保留的边缘坐标点范围逐渐缩小,拟合半径逐渐逼近理论齿顶圆半径,当拟合半径与理论齿顶圆半径的误差在一定范围内时,拟合圆心即为实际齿轮中心。
具体的齿轮中心确定步骤如下:
(1)读入根据边缘提取算法得到的齿轮边缘坐标点(xi,yi)。
(2)根据被测齿轮的齿数z、模数m,计算理论齿顶圆ra、齿根圆的半径rf,并根据标定的当量值将理论齿顶圆、齿根圆的半径转化为像素数来度量。
(3)将齿轮边缘坐标点(xi,yi)按最小二乘法进行圆拟合,得拟合圆心坐标(xc0,yc0)和半径Re。
“那是我的人生第一桶金,让我真正学会了铁路建设和工程现场技术。”在逐步的积累中,郭庆富的工作能力被所有的人认可,逐步担当起重要工作。2010年初,郭庆富参与黑龙江省内第一条高速铁路哈西高铁建设,面对多项难题,他敢为人先,带着一股冲劲儿摸索出了一套桥梁施工工法和操作经验,还总结出多项经验,使现场的施工进度迅速提升,随后又优化了王孙桥深基坑防护、支架及设计浇筑等方案,为哈西建设作出了巨大贡献。
(4)当拟合出的半径Re不满足精度要求,即|Re-ra|>ε时,其中ε的值可根据精度要求确定,将齿轮边缘坐标点(xi,yi)按最小二乘法拟合直线l,实际齿轮中心坐标一定位于这条直线l与拟合圆心坐标(xc0,yc0)的垂线l1方向,并且是在远离齿轮边缘坐标点(xi,yi)的方向,因此将拟合圆心坐标向实际齿轮中心坐标方向逼近,得到逼近中心坐标(xc1,yc1),如图3所示。
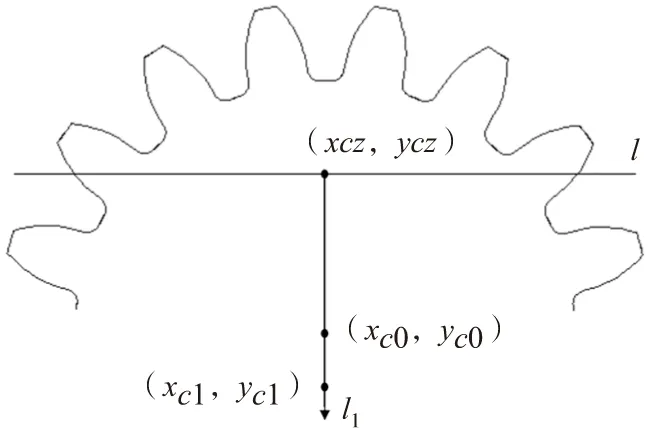
图3 逼近过程示意图
假设最小二乘法拟合的直线l:y=kx+b,则可以列出垂线l1方程:
(1)
解得垂足(xcz,ycz)为:
(2)
根据图3所示,假设拟合齿轮中心坐标向实际齿轮中心坐标方向移动的步长为h,可以列出关于逼近中心(xc1,yc1)的方程:
(3)
解得:
(4)
由于逼近齿轮中心(xc1,yc1)位于垂足(xcz,ycz)的上方,因此最终确定逼近中心(xc1,yc1)为:
(5)
(5)求所有边缘坐标点(xi,yi)到逼近中心坐标(xc1,yc1)的距离q,并求出距离最大值qmax,将距离值q≥qmax-δ的齿轮边缘坐标点(xt,yt)全部保留,其中δ为保留齿轮齿顶边缘点的范围。
(6)将保留的齿轮边缘坐标点(xt,yt),重复进行最小二乘法圆拟合与直线拟合,逐次逼近实际齿轮中心(xc,yc),在这个过程中将δ值逐渐减小,当拟合半径与理论齿顶半径在一定的误差范围内,则最小二乘法拟合的圆心即为齿轮中心(xc,yc)。
3 齿轮外轮廓分段
(1)由于齿轮中心坐标(xc,yc)是根据齿轮齿顶确定的,因此齿轮中心坐标(xc,yc)确定时,保留的齿轮边缘坐标点(xa,ya)就是齿轮齿顶。
(2)确定齿轮中心坐标(xc,yc)之后,求所有边缘坐标点(xi,yi)到齿轮中心(xc,yc)的距离q1,将距离值q1≥rf+σ所对应的边缘坐标点(xf,yf)保留,这些边缘点即为齿轮齿根,其中rf为理论齿根圆半径,σ为保留齿轮齿根边缘点范围,其值的大小可根据精度要求确定。
(3)对于所有的齿轮边缘点(xi,yi),剔除齿顶边缘点(xa,ya)和齿根边缘点(xf,yf)之后,剩余的即为齿轮齿廓边缘点(xz,yz),从而实现对齿轮外轮廓的分段过程。
4 实验分析
本系统采用的相机像素数为2448×2050,测量视野为30mm×30mm,已知被测齿轮的模数m=2,齿数z=60,精度等级为5级,则齿轮的理论齿顶圆半径ra=62mm。测量得到的齿轮图像如前图2所示。根据标定当量值e=19.497μm/像素可将齿顶圆半径转化为像素值,即ra=3179.98像素。根据边缘提取算法对图2所示齿轮进行边缘提取,提取的边缘信息如图4所示。采用本文方法,经过3次最小二乘法圆拟合和最小二乘法直线拟合,逐渐逼近齿轮中心,其过程如图5所示,拟合圆心坐标及半径如表1所示。齿轮中心确定后,最终实现对齿轮外轮廓的分段。
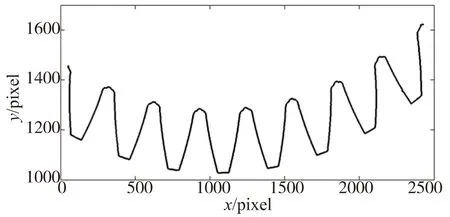
图4 齿轮边缘


图5 齿轮中心逼近过程

参数拟合圆心坐标拟合半径δ=80(1069.23,3824.95)2793.35δ=50(1053.51,4067.34)3031.48δ=10(1044.57,4208.26)3180.21
分析表1数据可以看出,经过3次拟合,拟合圆心逐渐逼近齿轮中心,当δ=10像素时,拟合半径与理论齿顶圆半径的误差为0.23像素,即4.484μm,则可以认为δ=10像素时所拟合的圆心坐标就是实际齿轮中心坐标所在位置,拟合半径就是实际齿顶圆半径值。图5c即为齿轮分段后的齿顶部分。齿轮中心确定后,可根据精度要求,确定σ值,将齿轮齿根部分从齿轮边缘分离出来,图6为σ=5像素时,齿轮分段后的齿根部分。齿轮边缘剔除齿顶部分和齿根部分,剩下的即为齿轮齿廓部分,如图7所示。
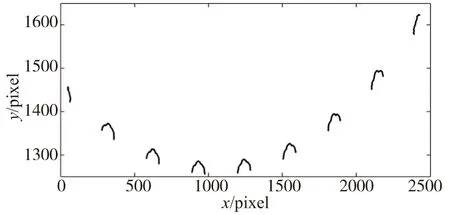
图6 齿轮齿根部分

图7 齿轮齿面部分
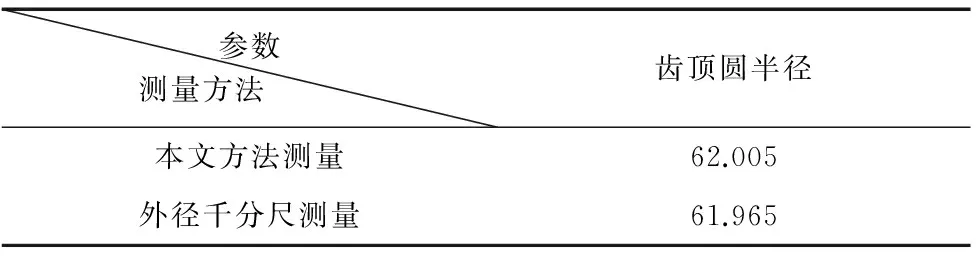
参数测量方法 齿顶圆半径本文方法测量62.005外径千分尺测量61.965
将本文方法测量的结果与使用外径千分尺测量的结果比较,其中使用的外径千分尺量程为100~125mm,最小刻度为0.01mm,分析表2数据,两种方法的测量结果基本一致,因此本文方法满足测量要求,可以实现齿轮外轮廓的分段。造成误差的原因主要有以下几个方面:
(1)硬件系统的误差。理论上讲,机器视觉测量系统的识别精度主要取决于相机的分辨率。相机的像素数越高,则测量中的当量值越小,测量精度就越高。另外,由于视场光强的不均匀以及外界光的干扰,从而影响到图像质量和边缘特征的提取而造成测量误差,相机镜头与被测齿轮表面不完全垂直产生测量误差。
(2)软件计算误差。在测量方法中,要将尺寸转化为像素值,由于计算上的考虑,数据的取舍过程会引起一定的误差。
对于本文方法,如果利用亚像素的边缘提取算法,同时采用多幅图像确定齿轮中心,齿轮外轮廓分段将更加准确。
5 结论
经过实验证明,上述方法应用于基于机器视觉的齿轮测量系统中,可以确定齿轮中心,完成对齿轮外轮廓的齿顶、齿廓和齿根的分段,有效提高测量系统的精度,并且程序简单,具有很强的可操作性,尤其适用于系统测量视野小,采集图像为齿轮部分轮齿的情况。
[1] 陈向伟,王龙山,刘庆民. 基于CCD的齿轮参数测量系统的研究[J]. 工具技术,2004,38(5):44-46.
[2] 肖俊建. 图像处理技术在齿轮缺陷检测中的应用[J]. 机械传动,2009,33(2):98-101.
[3] Carsten Steger, Markus Ulrich, Christian Wiedemann. Machine vision algorithms and application[M]. Beijing:Tsinghua University Press,2008,204-228.
[4] 徐俊成,张莉彦,阎华. 基于机器视觉的小模数塑料齿轮的在线检测[J]. 组合机床与自动化加工技术, 2011(3):57-60.
[5] 赵霞,毛建东. 齿轮齿形误差图像测量方法的研究[J]. 机床与液压,2009,37(6):124-128.
[6] 王文成. 基于机器视觉的齿轮参数测量系统设计[J]. 机械传动,2011,35(2):41-43.
[7] 黎鹏,刘其洪. 基于机器视觉的直齿圆柱齿轮尺寸参数测量[J]. 计算机测量与控制,2009,17(4):646-648.
[8] Li Z Q. Generalized Hough Transform: Fast DetecTion for Hybrid Multi-Circle and Multi-Rectangle [A]. Proceedings of the World Congress on Intel-ligent Control and Automation WCICA[C]. PoscataWay: Institute of Electrical and Electronics Engineers Inc., 2006,10130-10134.
[9] 张懿,杜江,刘艺. 基于图像边缘提取的最小二乘齿轮尖端检测[J].计算机应用, 2014,34(S1): 232-233.
[10] 杜红茹. 基于机器视觉的齿轮尺寸测量问题研究[D].兰州:兰州理工大学,2011.
(编辑赵蓉)
Research on Method of Gear Outer Contour Segmentation in Vision Measurement
WANG Ning1,DUAN Zhen-yun1,ZHAO Wen-hui1,SUN He1,2
(1. School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870;2. School of Electrical and Information Engineering, Liaoning Institute of Science and Technology, Benxi Liaoning 117000,China)
In the gear measuring process based on machine vision, the shape, accuracy and measuring requirement of gear outer contour are different, it is necessary to fit edge of tooth top, tooth profile and tooth root separately, so it is important to complete the segmentation of gear outer contour. Aiming at the problem of small field of system measuring vision and capturing picture only contain part of gear tooth, a method of gear outer contour segmentation is proposed, Extracting gear outer contour edge by eight neighborhood edge tracking method, and fitting edge points by least squares circle to determine the radius of the circle, and fitting a straight line to determine the approximate direction of the gear center, after several fittings, gradually approaching the gear center. After determining the gear center, complete the segmentation of gear tooth top, tooth profile and tooth root. The experimental result shows that the method can determine the gear center and comply segmentation of gear outer contour, the program is simple and easy to operate, and it is benefit to improve the measurement accuracy of system.
vision measurement; gear segmentation; eight neighborhood tracking; least-square fitting; gear center
1001-2265(2016)04-0117-04DOI:10.13462/j.cnki.mmtamt.2016.04.031
2015-05-13
十二五国家科技支撑计划(2014BAF08B01)
王宁(1991—),女,辽宁大连人,沈阳工业大学博士研究生,研究方向为机械设计与制造、基于机器视觉的测量,(E-mail)wangningcom@126.com。
TH16;TG86
A