半主动磁流变阻尼器悬架的一种ANFIS-PID控制策略*
2016-10-29冯忠祥
姜 康,张 腾,冯忠祥
(合肥工业大学 交通运输工程学院,合肥 230601)
半主动磁流变阻尼器悬架的一种ANFIS-PID控制策略*
姜康,张腾,冯忠祥
(合肥工业大学 交通运输工程学院,合肥230601)
针对磁流变阻尼器现象模型的逆模型建立问题和PID参数整定问题,提出了基于自适应神经模糊推理系统(ANFIS)建立的逆向模型和ANFIS-PID控制器。对1/4车辆半主动磁流变阻尼器悬架和控制系统进行联合仿真,仿真结果表明,与PID控制相比,ANFIS-PID控制有效的改善了簧载质量加速度、悬架动行程和轮胎动变形,表明提出的控制策略是有效的,为半主动磁流变阻尼器悬架的研究提供了一种可行途径。
磁流变阻尼器;逆向模型;ANFIS-PID控制器;联合仿真
0 引言
磁流变阻尼器由于其阻尼可调范围广,响应速度快,易于控制而被广泛的应用于车辆的半主动悬架系统。在磁场作用下,磁流变阻尼器的非线性特性和滞环现象显著。针对上述现象,Bouc和Wen提出了Bouc-Wen模型,能清晰的描述出大部分的滞环现象,但是对阻尼器低速运动时的滞环现象却难以表达;Stanway提出了Bingham模型,能较好的描述阻尼力-位移的非线性特性,但在低速情况下力-速度关系的非线性响应拟合效果不理想[1];在Bouc-Wen模型的基础上,Spencer等提出了现象模型,能很好的描述磁流变阻尼器的非线性特性和滞环现象,但是由于其数学模型复杂,逆向模型难以建立,而得不到广泛的应用[2]。
在实际控制操作中,需要简单实用的控制策略对一些对象比较复杂的操作进行控制。PID控制的优势在于其结构和算法都很简单,鲁棒性强,适用对象广,控制效果显著,在工业控制中应用最广泛[3]。传统的PID参数整定方法,如经验试凑法、Ziegle-Nichols法及理论设计法等,具有一定的盲目性,整定的效率低且效果不好,由于其整定后的结果是个固定值,难以使系统的控制效果一直处于最佳[4]。因此,对PID控制的研究,关键是解决参数整定问题[5]。
本文主要针对现象模型逆模型的建立和PID参数整定问题进行探究,首先在ADAMS软件中建立二自由度1/4车辆模型;其次是在MATLAB中分别建立现象模型、逆模型和ANFIS-PID控制器;最后,通过路面激励模型的输入,对二自由度1/4车辆模型进行联合仿真和优化控制,最后对仿真的结果进行分析。
1 半主动磁流变阻尼器悬架动力学模型
二自由度1/4整车半主动悬架动力学简化模型如图1所示,动力学方程表达式:
(1)
(2)
式(1)、(2)中,m2—簧载质量;m1—非簧载质量;k2—悬架弹簧刚度;k1—轮胎刚度;c—可变阻尼系数;z2—车身垂向位移;z1—轮胎垂向位移;z0—路面垂向位移。
路面输入采用的是白噪声[6],即
(3)
式(3)中,z0—路面垂直方向位移;G0—路面不平度系数;v0—车辆行驶速度;w(t)—单位白噪声;f0—下截止频率。表1为车辆与路面结构的相关参数值[6]。
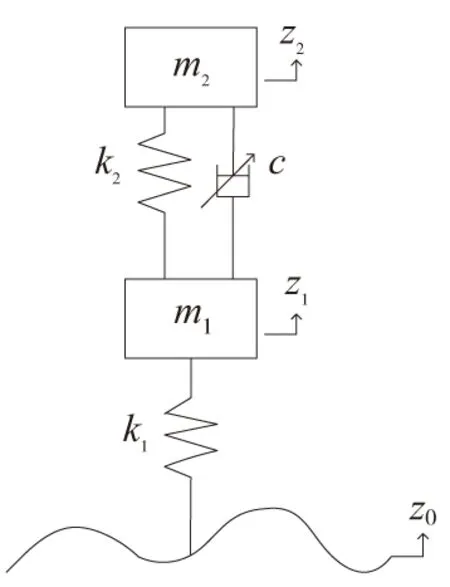
图1 半主动悬架简化模型

参数数值参数数值m2/kg320v0/m·s-150m1/kg40f0/Hz0.01k2/N·m-12×105G0/m36.4×10-6k1/N·m-12×106C/N·s·m-11000

图2 现象模型
磁流变阻尼器采用的现象模型如图2所示,文献2对其数学模型进行了推理和论证,主要将电压和力关联起来,数学方程表达式:
(4)
(5)
(6)
c1=c1a+c1bu
(7)
c0=c0a+c0bu
(8)
α=αa+αbu
(9)

(10)
式(4)~(10)中,F—磁流变阻尼器输出的阻尼力;k1a—蓄能器的刚度系数;c1—低速时的粘滞阻尼系数;c0—高速时的粘滞阻尼系数;k0a—高速时的刚度系数;x0—弹黃的初始位移;γ、β、A—描述迟滞特性的系数;α—进化系数;n—指数系数;αa与αb、c1a与c1b、c0a与c0b分别为α、c1以及c0一阶滤波器的系数;u—联系F和v的中间变量;v—磁流变阻尼器的输入电压,表2为现象模型的相关参数值[2]。

表2 现象模型的参数值
2 自适应神经模糊推理系统
ANFIS推理系统是将神经网络嵌入到模糊系统中,实现模糊控制的模糊化、模糊推理和去模糊化3个基本过程,系统省去了有导师学习的复杂过程,它即有模糊系统易于表达人类知识的特点,又有神经网络高效的自动学习能力[7]。
2.1建立ANFIS-PID控制器
传统PID参数整定采用的是凭借经验对其三个参数逐个的试凑,效率低下,而且整定后的参数在控制过程中是个固定值,无法适应对象模型参数变化的需要,而ANFIS可根据模型参数变化对PID三个参数在控制过程中进行动态调整,使控制的效果始终处于最佳状态[8-9]。实际在ANFIS-PID控制器设计的时候,采用的是由3个并列的双输入-单输出ANFIS构成,分别对kp、ki、kd三个参数进行动态调整,其整定参数原理如图3所示。

图3 ANFIS整定的PID控制系统结构
第一层为输入节点,将外部输入传送到系统中,在该系统中x1表示输入簧载质量的期望速度,x2表示输入簧载质量的实际速度。
第二层表示每个输入变量被分割为7个语言变量值,即{NB,NM,NS,ZO,PS,PM,PB},一个神经节点表示一个语言变量,共用14个节点表示,该层的隶属度函数选择高斯函数,式中cij表示高斯函数的中心值,σij表示高斯函数的宽度。
(11)
式中,i=1,2;j=1,2,3,...,7。
第三层有节点数49个,可建立49条模糊规则,对每条规则的适应度进行取小计算,即:
(12)
式中,i1∈{1,2,…,7}i2∈{1,2,…,7};l∈1,2,…,49。
第四层有神经元节点49个,该层主要是实现归一化计算,即:
(13)
式中,l∈1,2,…,49。
第五层主要实现kp、ki、kd三个参数的去模糊化计算,表示两个神经元之间的连接权值,即:
(14)
本文采用Delat学习规则来修正参数[10],其代价函数为:
(15)
ANFIS采用基于梯度下降的反向传播算法分别对cij、σij和wkl三个参数进行学习。
2.2建立ANFIS逆向模型
在Simulink中建立如图4所示的磁流变阻尼器模型。逆向模型的建立需要分步去实现,首先,需要采集一定量的输入输出数据对;其次,用一部分数据对对ANFIS进行训练,建立逆向模型;最后,用另一部分数据对对建立的逆模型进行检测。
选用的训练和检测数据对为:控制电压由高斯白噪声生成,频率为0~6Hz,幅值为0~3V,采样频率为500Hz,采样时间为10s,采集7000个数据点;位移数据用不加控制的半主动悬架仿真获得,同样采集7000个数据点。将这两组数据输入到图4所示的磁流变阻尼器模型中,收集7000组训练数据对,数据对分别为阻尼器的位移、速度、电压和阻尼力。取前5000组数据对,选择阻尼器的位移、速度和阻尼力作为ANFIS的输入,电压作为输出,建立逆向模型;再取后2000组数据对来检测逆模型,检测的结果如图5所示。

图4 simulink中建立的磁流变阻尼器模型

图5 逆向模型检测结果
3 联合仿真



图6 联合仿真框架图

图7 簧载质量加速度响应曲线对比

图8 悬架动行程响应曲线对比

图9 轮胎动变形响应曲线对比
4 结论
(1)从逆模型的检测结果曲线可以看出,在一定误差范围内,ANFIS建立的磁流变阻尼器的逆向模型是成功的,这为后面控制策略的实施打好了基础。
(2)通过簧载质量加速度、悬架动行程和轮胎动变形的曲线对比可以看出,ANFIS-PID控制效果明显优于PID控制效果,这是由于传统的PID控制是带有一定试凑性的静态控制,而ANFIS-PID控制是根据对象模型参数变化自适应调整的动态控制。
[1] Stanway R, Sproston J L, Stevens N G.Non-linear modelling of an electro-rheological vibration damper[J]. Journal of Electrostatics,1987,20(2):167-184.
[2] Spencer B F,Dyke S J,Sain M K,et al.Phenomenological model for magneto rheological dampers[J].Journal of Engineering Mechanics-ASCE,1997,123(3):230-238.
[3] Pedro J, Dahunsi O. Neural network based feedback linearization control of a servo-hydraulic vehicle suspension system[J]. International Journal of Applied Mathematics and Computer Science, 2011, 21(1): 137-147.
[4] 孟杰,杨海鹏,陈庆樟,等.基于遗传算法优化的汽车半主动悬架 PID 控制仿真研究[J].现代制造工程,2013(6),93-94.
[5] 吴士鹏,徐蕾,俞建卫.模糊PID在CNC粉末液压机控制系统中的应用研究[J].组合机床与自动化加工技术,2013(12):60-63.
[6] 喻凡,Crolla D.车辆动力学及其控制[M].北京:人民交通出版社,2003.
[7] 李目,谭文,周少武,等.基于自适应神经模糊推理系统的噪声消除方法[J].计算机仿真,2008(2):186-189.
[8] 雷霞,李晓光,尹振红.基于Sugeno推理自调整模糊Smith-PID控制器仿真研究[J].系统仿真学报,2008,20(18):4952-4955.
[9] 李国友,周巧玲,张广路,等.二次调节转速系统的自适应神经模糊PID控制[J].机床与液压,2010,38(21):95-98.
[10] 张泽旭.神经网络控制与MATLAB仿真[M].哈尔滨:哈尔滨工业大学出版社,2011.
(编辑赵蓉)
A ANFIS-PID Control Strategy for a Semi-active Suspension with Magneto Rheological Damper
JIANG Kang , ZHANG Teng,FENG Zhong-xiang
(School of Transportation Engineering, Hefei University of Technology, Hefei 230601, China)
For the problem to establish the inverse model of MR damper phenomenon model and to adjust PID parameters. Based on Adaptive Neuro Fuzzy Inference System(ANFIS), this paper proposes to establish the inverse model and ANFIS-PID controller. To co-simulation a quarter vehicle suspension system with a semiactive magneto rheological (MR) damper and control system. The results of simulations show that, compared with PID control, ANFIS-PID control improves effectively the sprung mass acceleration, suspension dynamic travel and dynamic deformation of the tire. It shows that the proposed method is effective, and it provides a possible way for the study of semi-active MR damper suspension.
MR damper; inverse model; ANFIS-PID controller; co-simulation
1001-2265(2016)04-0080-03DOI:10.13462/j.cnki.mmtamt.2016.04.022
2015-05-20
国家自然科学基金资助项目(51308177)
姜康(1974—),男,山东威海人,合肥工业大学教授,博士,研究方向为载运工具运用工程、人工智能;通讯作者:张腾(1989—),男,合肥工业大学硕士研究生,研究方向为载运工具运用工程, (E-mail)1124536535@qq.com。
TH166;TG506
A