机器人下肢外骨骼系统稳定性分析和步态控制研究*
2016-10-29周东栋
周东栋,樊 军
(新疆大学 机械工程学院,乌鲁木齐 830047)
机器人下肢外骨骼系统稳定性分析和步态控制研究*
周东栋,樊军
(新疆大学 机械工程学院,乌鲁木齐830047)
针对人在穿戴下肢外骨骼行走的过程中,人的不稳定扰动作用造成系统实际与规划的ZMP轨迹之间存在较大误差的现象。文章基于传统的ZMP稳定性判定理论,首先建立了人的物理干扰因素对系统稳定性影响的数学模型;然后对于人体侧向运动过程中,上肢的物理参数变化对系统稳定性的影响进行仿真;进而研究了踝关节角度校正对系统失稳的补偿控制,并进行了仿真;最后的仿真结果证明,在系统中引入校正关节角度补偿后,下肢外骨骼系统的稳定性得到了显著的提高。
下肢外骨骼;ZMP;稳定性;步态控制
0 引言
外骨骼机器人是一种可以穿戴行走式的机械设备,它可以减轻人类的负重,起到支撑、保护、运动等作用。它广泛的应用于医疗、农业、工业、军事等领域,而且已经成为未来科技发展的趋势。由于它的灵活性和方便性引起来很多国家的研究人员的很大重视,有很多学者投身于此方面的研究,经过了多年的研究,国内外出现了很多的著名的外骨骼机器人。例如:美国的WEAR战斗外骨骼机器人、BLEEX系统、浙江大学研制的可穿戴式的柔性 骨骼机械手等[1]。
外骨骼机器人在行走过程中先要基于ZMP稳定性判定对其进行步态规划,但是前提是需要其保持稳定性以及抗干扰性,据可查到的资料显示,国内外学者的主要研究重点是基于外骨骼机器人的运动控制方面,而对于下肢外骨骼受到物理干扰因素影响方面的研究基本上还属于空白。因此,本文以穿戴式外骨骼机器人为研究平台,首先在ZMP稳定性判定理论的基础上,对于加入物理干扰因素后的公式进行了修正[2]。进而对于修正后的公式进行了模拟仿真,得到了人体的质量M以及扰动角θ对系统稳定性影响权重。最后,通过对系统在失稳情况下加入踝关节角度校正的方法对其进行稳定性补偿,并进行了仿真验证。
1 理论模型的建立
ZMP是南斯拉夫学者提出的一种基于机器人动态行走稳定性判定的理论,慢慢地发展成全世界大多数研发机器人的判断其稳定性的重要指标[3]。ZMP指的是在重力和惯性力投影到地面上的合力矩在x,y轴上分量为零的点[4]。则机器人静态行走时的ZMP点坐标如式 (1)所示:
(1)
传统的双足机器人进行步态规划时,一般是通过ZMP对其稳定性进行判断[5],但是对于下肢外骨骼机器人来说人在穿上外骨骼后,两者之间会产生互交作用[6],那么人体的高度、重量、扰动范围以及角度等不确定性因素会对于人机系统产生较大的干扰力矩,使人本身和下肢外骨骼的协调度大大改变,因此在ZMP稳定性评判理论的基础上对于人体的干扰因素对于下肢外骨骼稳态的影响[7]。由于人机系统的运动过程比较复杂,如果同时考虑人机系统在行走过程中的侧向和前向运动之间的耦合,那么分析会比较复杂。因此在本文仅对于在侧向运动人对人机系统的稳定性进行了分析。
由于膝关节在侧向平面内的运动自由度为0,因而可以将下肢外骨骼的两个腿部都看做是一个连杆,并且由于上肢相对于髋部是保持不动的,因此可以将上肢与髋部之间视为固定连接。那么对于系统即可简化为刚体六连杆模型,如图1所示。
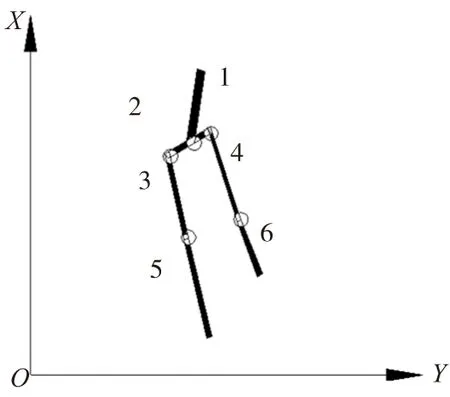
图1 下肢外骨骼系统侧向运动连杆模型
对于下肢外骨骼不受外力矩干扰的情况下,ZMP的坐标如式(2)和式(3)所示:
(2)
(3)
当把人的高度、重量、扰动范围以及角度等干扰性因素考虑进去后,修正后的公式为:
(4)
(5)
(6)
(7)
我们可以通过式(6)和式(7)来对分析人的干扰因素对ZMP稳定点的影响。由于在穿戴下肢外骨骼时,人的前后左右扰动行为具有不可预测性,因此我们在下肢外骨骼的腿部安装上六维力传感器,那么就可以测得人体自身的摆动对下肢外骨骼系统产生的干扰力以及力矩。
假设B点是人体对下肢外骨骼合力以及合力矩的作用点,那么公式(8)为人体的干扰对点B处的合力位置向量;公式(9)和公式(10)分别为人体对下肢外骨骼的干扰合力和合力矩。
rB=rxi+ryj+rzk
(8)
Fb=fxi+fyj+fzk
(9)
Mb=τxi+τyj+τzk
(10)
下肢外骨骼对于点C(即ZMP点)的动量矩如公式(11)所示:
(11)
其中Lc表示下肢外骨骼在点C处的角动量;N表示外力的数目。
由ZMP理论可以得知M在水平方向上的分量为0,因此由公式(6)可以推得:
(12)
其中ri表示为连杆i质心位置向量;rzmp表示为ZMP点的位置向量;mi表示为连杆i质量;ai、Ii、ωi、g以及hort分别表示为连杆i的加速度、转动惯量矩阵 、角速度向量、重力加速度向量以及水平分量。
将公式(12)分别在X、Y方向上分解可以得到ZMP点公式,如式(13)和式(14)所得:
(13)
(14)
因此可以通过上面的公式计算出ZMP的真实位置,可以分析人体对于下肢外骨骼系统的ZMP点的干扰影响,并且可以为以后的下肢外骨骼的稳定性控制方面的研究提供一些理论参考。
2 仿真试验和分析
下肢外骨骼系统的前向以及侧向运动在一般情况下是可以进行解偶。因此,为了方便分析,在下文我们只考虑人机系统的侧向运动情况。由于人体的各个物理参数的变化对于人机系统的稳定性的干扰影响是耦合的,而且想要获得参数的权重因子会很难。下面我们在不考虑人体的前向以及侧向运动两者之间的耦合作用的情况下,简单地认为人体的各个参数变化对于实际xzmp以及yzmp都有影响,而人体在侧向运动中只影响实际的yzmp值。下文对于人体侧向运动过程的各个物理参数的变化情况进行模拟仿真实验分析。
由人体的特征可知:近似认为人体的身高与体重的关系成正比的,可以简化为公式(15);由于人体的侧向运动可以简化成倒立摆模型的运动并且具有周期性,人体的摆动规律的公式如下式(16):
D=kM
(15)
(16)
其中T为人体的摆动周期;A为摆动幅度;t为时间;θ为人体的扰动角度。
因此,可以得到人体的质心位移以及加速度公式如下式(17):

(17)

(18)
(19)
因此下文对于人体身高D、体重M以及扰动角度θ三个权重因子对下肢外骨骼系统进行模拟仿真,如图2所示:
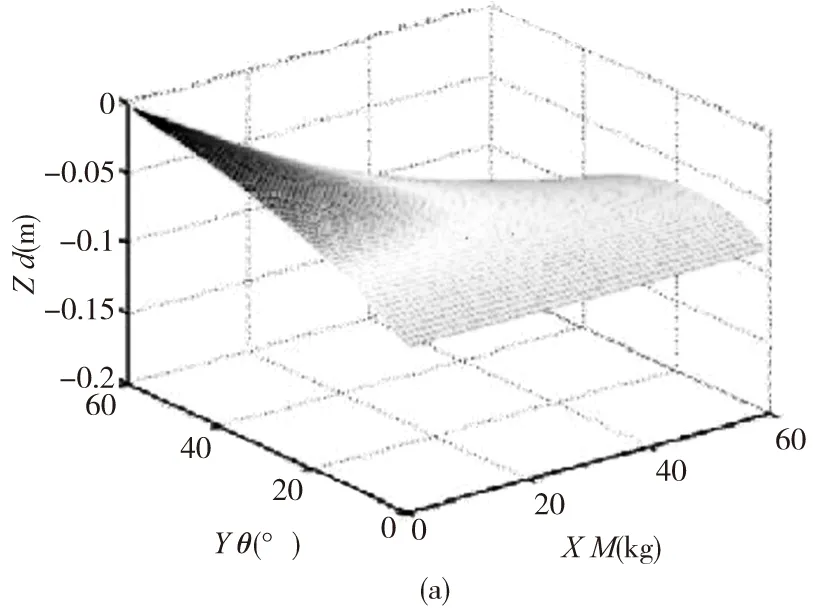
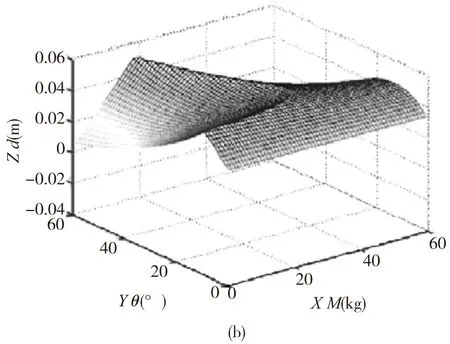

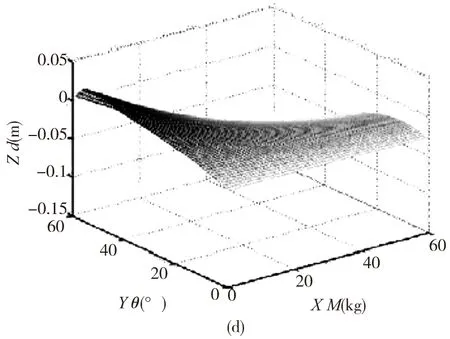


图2 为人体的质量M以及扰动角θ
图2反映的是在一个步行周期内几个不同时刻,人体的质量M和扰动角θ的变化对于系统稳定性的影响权重。由上图分析可以得到:人体的质量M以及扰动角θ对于人机系统稳定性影响呈非线性相关的关系,并且可以通过对仿真得到的离散数据进行插值,可以得到任意时刻运动的情况下,人体的质量M以及扰动角θ对系统的稳定性影响的权重因子。因此,将权重因子用在下肢外骨骼系统稳定性控制方面,就可以实现人在系统失稳前自我通过主动运动或者通过改进外骨骼控制系统的补偿方式进行补偿控制。
3 踝关节角度校正的稳定性补偿控制
由于必须通过对下肢外骨骼的失稳状态进行补偿,才可以维持人机系统的稳定性,由于下肢外骨骼系统离地面最近的关节是踝关节,因此可以通过控制支撑腿踝关节转动角度,对于系统的失稳状态进行补偿,进而使下肢外骨骼系统的步态调整得到了有效的补偿,从而在一定程度上提高了人机系统的步态平稳性。
踝关节的角度校正稳定控制结构图如图3所示,其中外环为根据ZMP误差的踝关节角度校正控制,内环则为各关节角度控制。
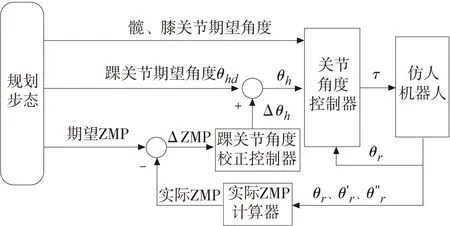
图3 踝关节的角度校正稳定控制图


图4 加入踝关节校正控制器前后的ZMP轨迹图
通过MATLAB进行仿真,把法国的Nao做为实验对象,选取采样时间T=0.02,髋关节控制器的参数取KP=37、TI=0.3、TD=0.05;膝关节控制器的参数取KP=40、TI=0.4、TD=0.03;踝关节控制器的参数取KP=43、TI=0.06、TD=0.5。
从图4可以清楚看出来,在利用控制器的作用下,实际的ZMP轨迹对于期望的ZMP轨迹的跟踪性能有了显著加强,明显地提高了下肢外骨骼系统的步态稳定性。
4 结论
本文讨论了穿戴式下肢外骨骼系统中人体的物理干扰因素对人机系统的步态稳定性的影响,并对所建立的理论数学模型进行仿真。对于补偿控制进行了初步分析,在系统中引入了校正关节角度的补偿控制,通过仿真的结果证明了此方法可以有效地提高人机系统的步态稳定性,使系统的实际ZMP轨迹对于期望ZMP轨迹的跟踪性能得到了显著加强,使其在失稳状态时可以得到有效的补偿调整。
[1] 邢凯,赵新华,陈炜,等.外骨骼机器人的研究现状及发展趋势[J].医疗卫生装备,2015,36(1):104-107.
[2] Huang Q,Kaneko K,Yokoi K,et a1.Blalance control of a biped robot combining off-line pattern wit real-time modification[C].In:Proceedings of the 2000 IEEE International Conference on Robotics & Automation,San Francisco,USA,2000:3346-3352.
[3] Takanishi A,Ishida M,Yamazaki Y,et a1.The realization of dynamic walking robot WL-10RD[C].In:Proc Int Conf Advanced Robotics,1985:459-466.
[4] 邓欣.双足机器人步行稳定性研究[D].哈尔滨:哈尔滨工程大学,2007.
[5] 张世龙.双足机器人的步态规划及稳定性研究[D].无锡:江南大学,2014.
[6] 易嘉伟,程文明,濮德璋.携行式外骨骼下肢运动学分析与仿真[J].机械设计与制造,2014(2):171-174.
[7] 崔谨想.下肢外骨骼机器人系统建模与仿真实验研究[D].哈尔滨:哈尔滨工业大学,2014.
(编辑赵蓉)
Stability Analysis and Gait Control for the Lower Extremity Exoskeleton System of the Robot
ZHOU Dong-dong,FAN Jun
(College of Mechanical Engineering, Xinjiang University, Urumqi 830047,China)
In this paper, first, based on the traditional ZMP theory, a mathematical model of human’s physical disturbances on the stability of lower extremity exoskeleton system is established. Then the influence of upper extremity’s physical parameters on the stability of the lower extremity system is simulated during human’s sideway movement. And then,the compensation control on the losing stability of the lower extremity exoskeleton system from the ankle angularity correction is studied and this process is simulated. The last simulation shows that the stability of the lower extremity exoskeleton is significantly improved with the ankle angularity correction and the angle compensation.
lower extremity exoskeleton;ZMP;stability;gait control
1001-2265(2016)04-0076-04DOI:10.13462/j.cnki.mmtamt.2016.04.021
2015-10-31;
2015-11-20
国家自然科学基金项目(11462021)
周东栋(1991—),男,河南邓州人,新疆大学硕士研究生,研究方向为人体外骨骼设计与研究,(E-mail)13134462601@163.com;通讯作者:樊军(1965—),男,山东青岛人,新疆大学副教授,研究方向为人体外骨骼的设计与研究、机器零件误差分析,(E-mail)xj_fanjun@163.com。
TH166;TG65
A