相控阵结合伺服辅助的车载动中通天线跟踪方法*
2016-10-28蒋文丰
蒋文丰
(中国西南电子技术研究所,成都 610036)
相控阵结合伺服辅助的车载动中通天线跟踪方法*
蒋文丰**
(中国西南电子技术研究所,成都610036)
天线跟踪功能是车载动中通系统(SOTM)提供无线通信能力的前提,相控阵天线能提供较好的跟踪性能,但是存在波束扫描范围有限的问题。为实现相控阵天线全方位跟踪能力,提出了一种相控阵+伺服辅助的方法。给出了算法数据处理流程,并完成了原理样机设计。根据原理样机工作原理给出了跟踪角误差计算公式,测试结果与计算结果相符。测试结果表明:在(57.88~115.76)°/s角速度下,通信链路信噪比损失小于0.5 dB。
车载动中通;天线跟踪;相控阵天线;伺服系统;跟踪角误差公式
引用格式:蒋文丰.相控阵结合伺服辅助的车载动中通天线跟踪方法[J].电讯技术,2016,56(3):284-289.[JIANG Wenfeng.An antenna tracking method using Phased array and servo for vehic1e sate11ite communication on the move[J].Te1ecommunication Engineering,2016,56(3):284-289.]
1 引 言
车载动中通系统是指基于同步轨道卫星的卫星移动通信系统,具有通信能力强、机动性能强、隐蔽性好、使用方便的特点,具有广泛的军用、民用应用背景[1],目前主要应用在军事通信、地质勘探、应急通信、新闻转播等领域[2]。由于工作条件的特殊性,需要车辆在交战区、山区、路面颠簸不平等情况下行使,在这些情况如何保证车载动中通系统收发天线与卫星天线的实时对准(即天线跟踪)是实现车载动中通的核心问题。
传统车载动中通系统一般采用窄波束反射面天线,并把它安装在一个三维机械稳定平台上,靠稳定平台和伺服系统保证天线波束实时对准卫星。传统方法由于采用反射面天线,体积大,高度高,车辆往往超高,机动性差,特征明显,在战场环境下容易受到攻击。传统方法天线跟踪性能主要由稳定平台和伺服系统决定,由于稳定平台和伺服系统为机械方式,系统反应速度慢,控制复杂,跟踪效果差[3]。为克服传统车载动中通系统天线跟踪方式的缺点,提高车载动中通系统在车辆姿态剧烈变化情况下的反应速度和跟踪效果,采用相控阵实现天线跟踪。相控阵采用电扫描方式实现波束快速变换,反应速度可达毫秒级。相控阵天线具有小型化、低剖面、可共性、高性能等特点,是目前动中通天线发展方向之一,但是相控阵天线波束扫描范围有限,不能实现全方位的天线跟踪。
本文分析了传统车载动中通系统天线跟踪方法的不足,提出了采用相控阵天线电扫描结合伺服辅助实现天线全方位跟踪的方法,完成了天线跟踪算法和原理样机设计和实现,并通过原理样机测试了相控阵+伺服辅助方式天线跟踪方法的性能。
2 相控阵+伺服辅助方案
车载动中通系统采用的天线跟踪方法有精确指向方式、信标跟踪方式以及混合跟踪方式3种[4]。精确指向方式是利用同步轨道卫星相对地球静止的特点,通过定位和姿态测量设备获取车辆信息,通过车辆与卫星间的几何关系直接计算伺服系统控制参数,实现天线跟踪;信标跟踪方式是通过接收信标信号获得方位、俯仰误差信号,根据误差信号完成伺服系统控制,实现天线跟踪;混合跟踪方式实际上是精确指向方法和信标跟踪方法的结合,由精确指向方式完成初始捕获,初始捕获后由信标跟踪方式完成天线跟踪。
信标跟踪方式需要使用信标,很容易被侦查、干扰和欺骗,导致天线跟踪功能失效,本文中涉及的天线跟踪方法使用精确指向方式。目前成熟的商用GPS+陀螺惯导设备航向测量精度优于0.1°,横滚角、俯仰角的测量精度达0.01°,可满足使用精度要求。
由于阵元间的耦合和遮挡,相控阵天线在扫描角增加到一定范围后等效全向辐射功率(Equiva1ent IsotroPic Radiated Power,EIRP)会显著下降。为保证相控阵天线EIRP,相控阵天线扫描角范围一般只能达到±60°。如图1所示,相控阵天线波束只能覆盖锥形部分,为实现全方位的天线跟踪需要附加伺服设备辅助,如图2所示,通过伺服转动弥补相控阵天线方位角和俯仰角的覆盖盲区。
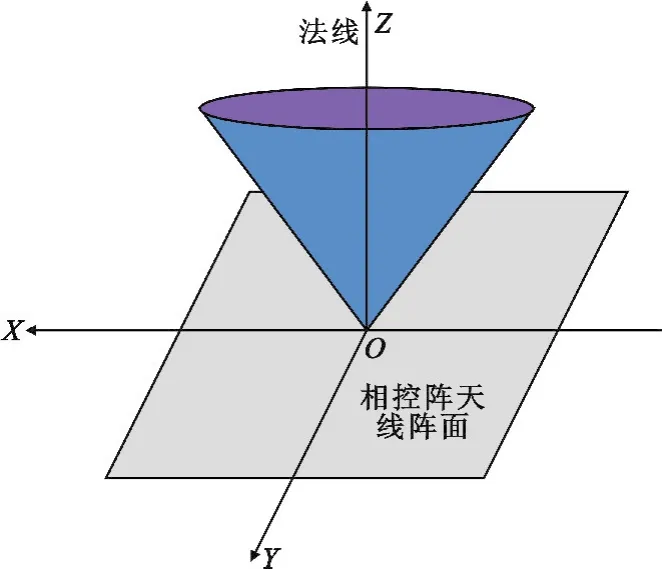
图1 相控阵天线波束覆盖区域示意图Fig.1 Coverage region of the Phased array antenna beam
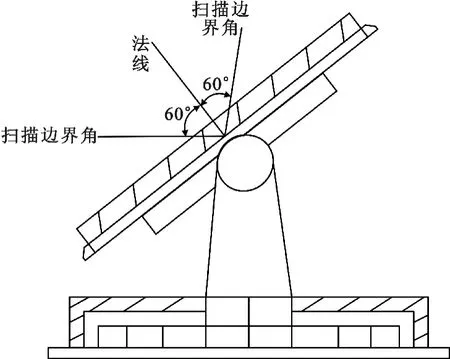
图2 相控阵+伺服辅助结构示意图Fig.2 Structure of the Phased array antenna and servo
相控阵+伺服辅助方式继承了相控阵天线电扫描波束变换快速的特点,可保证车辆姿态剧烈变化情况下的反应速度和跟踪效果,同时通过伺服设备的辅助,可实现车载动中通系统一定EIRP下的全方位波束覆盖。
3 相控阵+伺服辅助方法设计与实现
相控阵+伺服辅助方式下天线跟踪原理如图3所示,通过传统精确指向方法得到当前转台(伺服机构在原理样机中用转台等效)理论方位和俯仰角(θ1,φ1),该方位和俯仰角可保证相控阵天线法线对准卫星S。实际上由于转台机械部件的传动延时和角速度限制,当车辆存在方位或俯仰上的变化时,转台不能立刻转动到理论结果得到的方位和俯仰角位置,转台实际方位和俯仰角为(θ2,φ2),该位置相控阵天线法线没有对准卫星S。通过理论计算可得到当前转台位置下相控阵天线原点O2到卫星S的矢量在天线坐标系下的数学公式,根据数学公式计算相控阵天线的波束指向角。
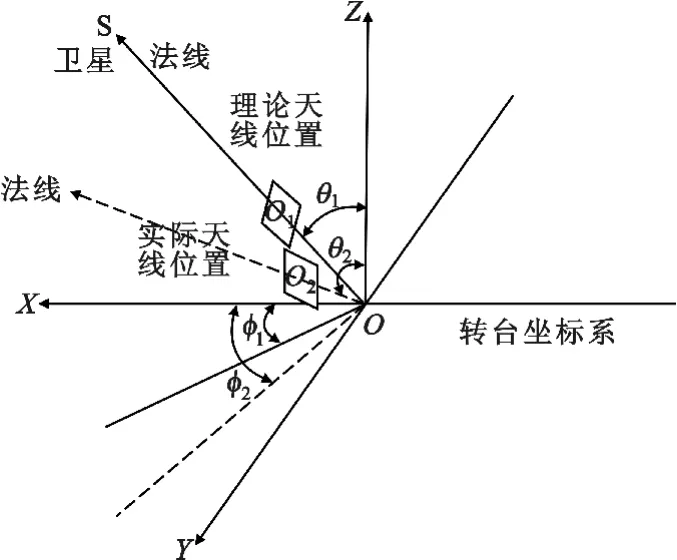
图3 相控阵+伺服辅助方式天线跟踪原理Fig.3 The antenna tracking PrinciP1e of the Phased array antenna and servo
相控阵+伺服辅助方式下天线跟踪算法通过相控阵天线的波束指向控制来弥补由转台机械部件的传动延时和角速度限制带来的天线指向偏差,使相控阵天线波束指向卫星S。相控阵天线的波束指向控制为电扫描控制,响应速度快,实时性强。
相控阵+伺服辅助方式天线跟踪算法由两部分组成:
(1)通过定位与测姿设备获得车辆的位置和姿态后根据几何关系计算转台理论方位、俯仰角,计算结果用于控制转台;
(2)采集转台当前方位、俯仰角信息,根据几何关系计算相控阵天线波束指向角,计算结果用于控制相控阵波束指向。
相控阵+伺服辅助方式天线跟踪算法数据处理流程如图4所示。
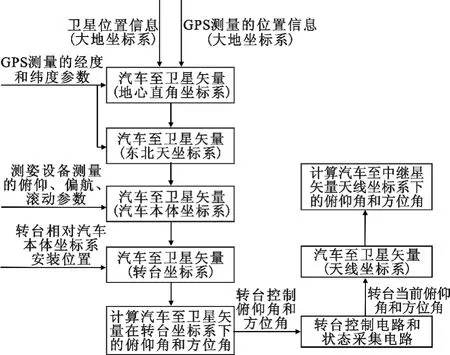
图4 相控阵+伺服辅助方式天线跟踪算法流程图Fig.4 The f1ow chart of the antenna tracking arithmetic for the Phased array antenna and servo
下面介绍算法数据处理流程以及计算过程。
(1)根据GPS设备输出的地心大地坐标系下经度、纬度、高度计算汽车在地心直角坐标系下的坐标。地心大地坐标(λ,φ,h)到地心直角坐标系(x,y,z)的变换公式如下:
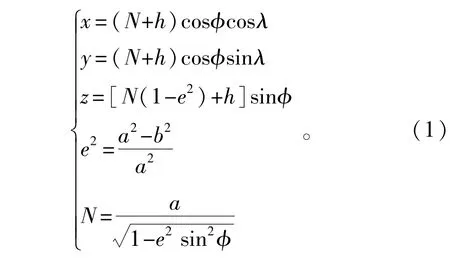
大地纬度φ的值在-90°~90°之间,赤道面以北为正,以南为负;大地经度λ的值在-180°~180°之间,格林尼治子午面以东为正,以西为负。
GPS坐标和卫星坐标都采用WGS-84协议地心地固直角坐标系来描述,WGS-84所给出的一些基本大地参数如下:
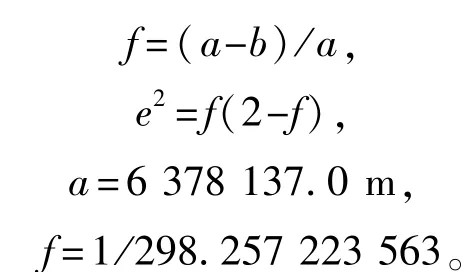
由以上计算公式可得到WGS-84坐标系下汽车当前位置P的地心地固直角坐标(x0,y0,z0)以及卫星S的地心地固直角坐标(xs,ys,zs)。
(2)完成由地心地固直角坐标系到东北天坐标系(东北天(ENU)坐标系,也可称为地理坐标系)的转换。如图5所示,首先绕地心地固直角坐标系Z轴旋转λ+90°,然后再绕新的X轴旋转90°-φ,地心地固直角坐标系就与ENU坐标系重合,转换矩阵如下:
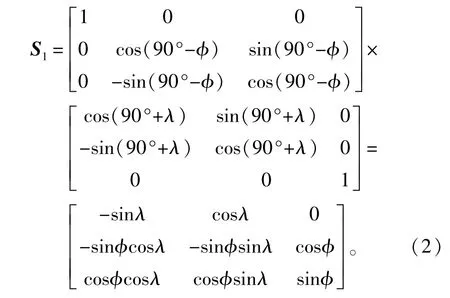
汽车当前位置P到卫星S的向量在东北天(ENU)坐标系下坐标为
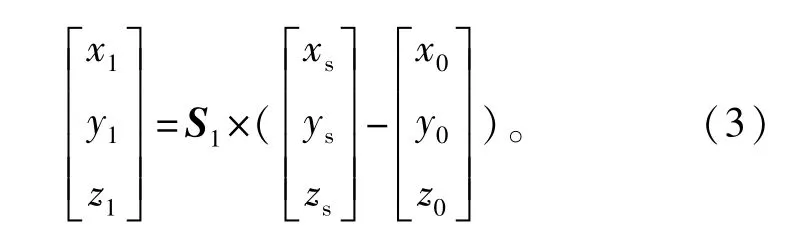
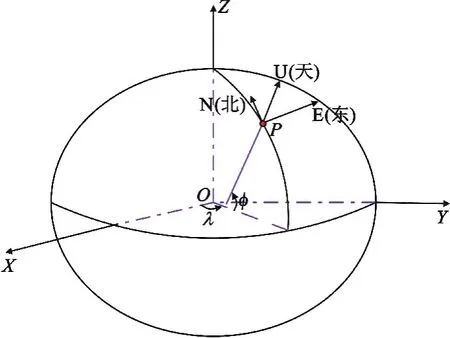
图5 地心地固坐标系与水平坐标系Fig.5 The earth centered earth fixed coordinates and horizonta1 coordinates
(3)完成由东北天坐标系到汽车本体坐标系的转换。东北天坐标系转换为汽车本体坐标系需要使用与汽车本体姿态相关的信息(偏航角、俯仰角、滚动角),如图6所示。

图6 汽车本体坐标系与姿态关系Fig.6 The re1ation between the car body coordinates and attitude
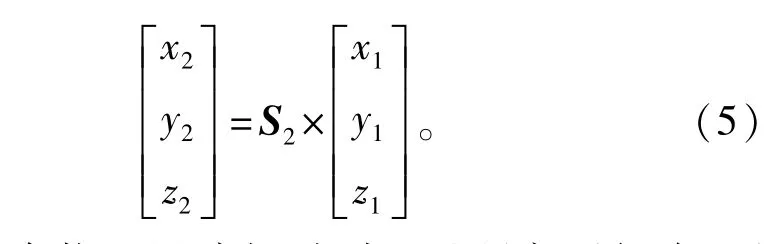
坐标转换过程按航向、俯仰、滚动的过程进行,转换矩阵如下:
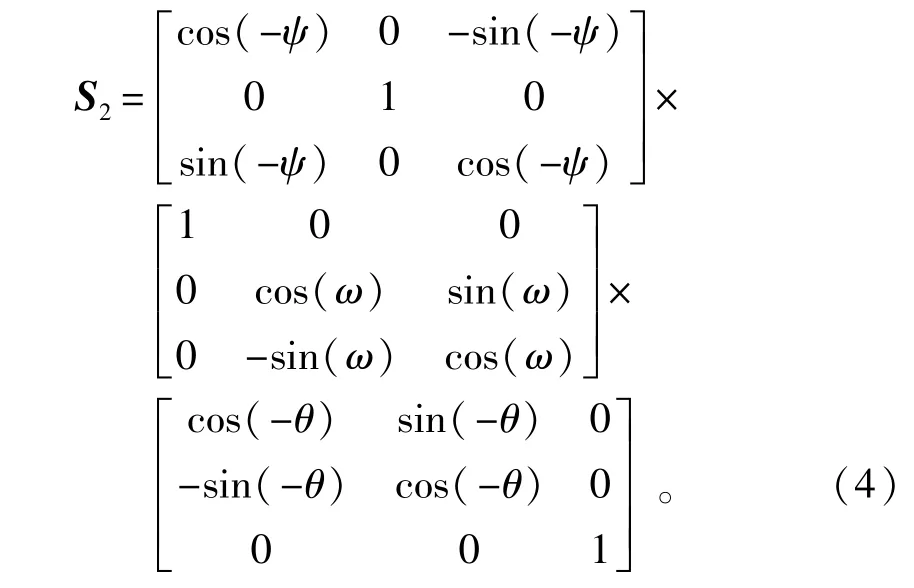
式中:θ为偏航角,载体轴线Y在水平面的投影与正北方向的夹角,顺时针为正;ω为俯仰角,载体轴线Y与其在水平面内的投影之间的夹角,向上为正;ψ为滚动角,绕载体轴线Y的转角,逆时针为正。
汽车当前位置P到卫星S的向量在汽车本体坐标系下坐标为
(4)汽车物理尺寸相对到卫星距离可忽略,可认为汽车当前位置P与转台原点O重合,原理样机中转台坐标系与汽车本体坐标系一致,因此转台理论方位、俯仰角计算公式如下:

(5)根据转台实际方位和俯仰角(θ2,φ2),得到汽车当前位置P到卫星S的向量在天线坐标系下的坐标(可认为汽车当前位置P与天线原点O2重合),转换矩阵如下:
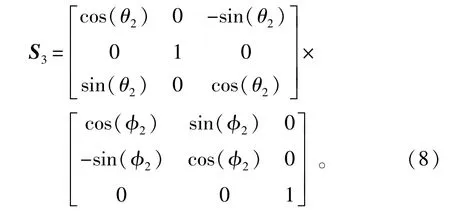
汽车当前位置P到卫星S的向量在天线坐标系下坐标为
由向量(xa,ya,za)通过式(7)的计算方法可得到相控阵天线波束的方位角和俯仰角。
4 测试与分析
为验证相控阵+伺服辅助方式下天线全方位跟踪方法的性能,开发了一套能实现前、返向语音和视频传输的车载动中通原理样机,设备组成如图7所示。图8为车载动中通原理样机参加某飞行器着陆返回搜救任务的情况,图9为相控阵天线阵元模型。
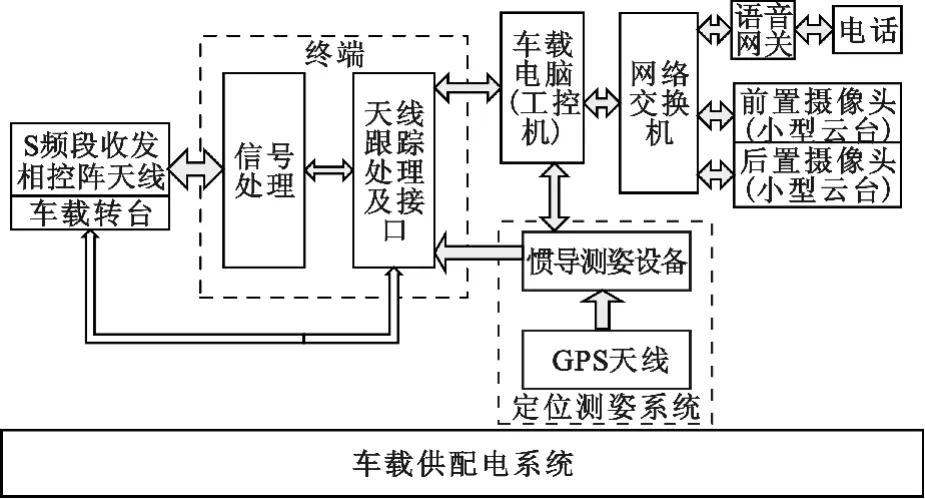
图7 原理样机设备组成示意图Fig.7 The equiPment comPosition of the PrototyPe

图8 原理样机工作场景Fig.8 The PrototyPe working scene
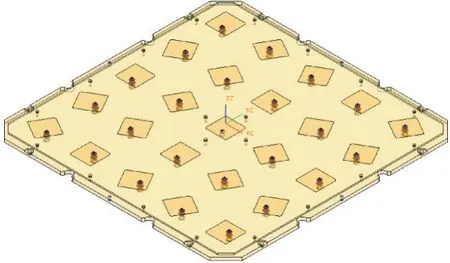
图9 相控阵天线阵元模型Fig.9 The Phased array antenna e1ements mode1
车载动中通原理样机主要部件技术指标如表1所示。通过在原理样机伺服设备上安装普通微带天线的方法测量了方位角变化时,传统车载动中通精确指向方式与相控阵+伺服辅助方式的性能。
下面对测试结果进行具体分析。
(1)传统精确指向方式
根据原理样机天线跟踪算法数据处理流程,传统车载动中通精确指向方式天线跟踪方法跟踪角误差计算公式如下:

式中:t1为测姿设备延时(1/100 s);t2为跟踪算法计算延时(1/15 s);t3为机械伺服控制设备传动间隙时延(≤200 ms);vcar-ang1e-v表示车辆角速度。
根据式(10),原理样机在车辆角速度为57.88°/s、69.46°/s时,跟踪角误差分别为16.03°和19.24°。根据微带天线方向图特性,在其法线方向接收或发射的信号能量最强,当目标偏离法线时,接收机接收的信号能量会降低,由于噪声能量不变,体现在接收机上的信噪比会降低,因此可以根据信噪比的变化判断目标偏离法线的范围。根据微带天线指标(如表1所示),其-3 dB波束宽度为±19°,即当目标在±19°天线波束内时,无线链路信噪比损失小于3 dB。由于系统余量只有3 dB,在57.88°/s角速度下,跟踪角误差在-3 dB波束内,通信链路信噪比损失小于3 dB,因此可维持通信链路,但是在69.46°/s角速度时跟踪角误差在-3 dB波束外,通信链路信噪比损失大于3 dB,此种状态下接收机已无法完成信号解调。当车辆角速度继续增加时,跟踪角误差会继续变大,通信链路信噪比损失更大,接收机无法完成信号解调,与实际测试结果相符。
(2)相控阵+伺服辅助方式
根据原理样机天线跟踪算法数据处理流程,相控阵+伺服辅助方式天线跟踪方法跟踪角误差计算公式如下:

式中:t1、t2、vcar-ang1e-v同式(10);t3为相控阵波束指向控制时延(≤1 ms);vservo-ang1e-v表示伺服系统角速度。
原理样机在车辆角速度为57.88°/s、69.46°/s、96.47°/s、115.76°/s时,跟踪角误差分别为4.64°、4.75°、5.02°、5.22°。根据相控阵天线方向图,其-0.5 dB波束宽度为±6°,当跟踪角误差落在-0.5 dB波束内时,通信链路信噪比损失小于0.5 dB。根据式(11)计算结果,试验所采用的车辆角速度条件下,跟踪角误差都小于6°,落在相控阵天线-0.5 dB波束内。测试结果表明,在试验所采用的车辆角速度条件下无线链路信噪比损失小于0.5 dB,与理论分析相符。
根据相控阵+伺服辅助方式天线跟踪方法设计原理,相控阵+伺服辅助方式天线跟踪方法依靠相控阵天线的电扫描功能校正当前伺服系统方位、俯仰角与理论方位、俯仰角之间的差值,具有反应速度快、对伺服系统传动间隙不敏感的特点。根据测试数据和分析,相控阵+伺服辅助方式相比传统精确指向方式能适应更大的角速度,而且在不同的角速度条件下,通信链路信噪比变化较小。根据跟踪角误差计算公式,排除测姿设备延时带来的影响,相控阵+伺服辅助方式的跟踪角误差主要与跟踪算法计算延时和伺服系统角速度相关(相控阵波束指向控制时延很短,其带来的影响可忽略)。
5 结束语
本文分析了传统车载动中通系统天线跟踪方法的缺点,提出了采用相控阵+伺服辅助的天线跟踪方法以实现全方位跟,完成了相应跟踪算法设计,并通过原理样机测试了相控阵+伺服辅助方式的天线跟踪方法性能。理论分析和测试数据表明:相比传统精确指向方式车载动中通系统天线跟踪方式,相控阵+伺服辅助方式的天线跟踪方法对角速度变化不敏感,原理样机系统在(57.88~115.76)°/s角速度下,无线链路信噪比损失均小于0.5 dB。
根据相控阵+伺服辅助方式天线跟踪方法跟踪角误差计算公式,可通过减少测姿设备延时和跟踪算法计算延时进一步减少跟踪角误差,跟踪角误差的减少可支持系统使用定向性更高的天线,可提高天线EIRP和无线链路数据传输容量。
[1] 余伟平,张鹏,伍宗伟,等.车载动中通伺服系统研究设计[J].武汉理工大学学报,2009,31(5):98-101.
YU WeiPing,ZHANG Peng,WU Zongwei,et a1.Research and design on servo system of SOTM[J].Journa1 of Wuhan University of Techno1ogy,2009,31(5):98-101.(in Chinese)
[2] 武伟良,刘晓丽,任娟,等.车载动中通伺服系统关键技术的研究[J].河北省科学院学报,2010,27(1):31-34.
WU Wei1iang,LIU Xiao1i,REN Juan,et a1.The studies on critica1 techno1ogies of servo system of vehic1e sate11ite communication in motion[J].Journa1 of the Hebei Academy of Sciences,2010,27(1):31-34.(in Chinese)
[3] 舒林净.基于平板天线的动中通研究[D].合肥:合肥工业大学,2006.
SHU Linjing.The study on sate11ite communication in motion basing on Pane1 antenna[D].Hefei:Hefei University of Techno1ogy,2006.(in Chinese)
[4] 郭嘉俭.动中通卫星通信系统若干技术问题探讨[J].卫星与网络,2007(7):38-49.
GUO Jiajian.Discussion on some technica1 Prob1ems about the sate11ite communication system on the move[J].Sate1-1ite&Network,2007(7):38-49.(in Chinese)

蒋文丰(1982—),男,湖北天门人,2008年于中国科学院计算所获硕士学位,现为工程师,主要从事航天测控方面的研究工作。
JIANG Wenfeng was born in Tianmen,Hubei Province,in 1982.He received the M.S. degree from Institute of ComPuting Techno1ogy,Chinese Academy of Sciences in 2008.He is now an engineer.His research concerns sPacecraft TT&C. Emai1:jiangwenfeng1982@126.com
An Antenna Tracking Method Using Phased Array and Servo for Vehicle Satellite Communication on the Move
JIANG Wenfeng
(Southwest China Institute of E1ectronic Techno1ogu,Chengdu 610036,China)
The antenna tracking function is the foundation for the vehic1e sate11ite communication on the move(SOTM)to offer wire1ess communications,and the Phased array antenna can Provide better tracking Performance,but the beam scanning range is 1imited.In order to rea1ize the Phased array antenna tracking in the entire orientation,a method using Phased array antenna and servo is Presented.The data Processing f1ow of a1gorithm is Provided,and the PrototyPe has been deve1oPed.According to the PrototyPe working PrinciP1e,the formu1a to ca1cu1ate the tracking ang1e error is given.The test resu1t matches with the ca1cu-1ating resu1t,and the signa1-to-noise ratio(SNR)1oss is sma11er than 0.5 dB at the ang1e sPeed between (57.88~115.76)°/s.
vehic1e sate11ite communication on the move(SOTM);antenna tracking;Phased array antenna;servo system;tracking ang1e error formu1a
TN927
A
1001-893X(2016)03-0284-06
10.3969/j.issn.1001-893x.2016.03.009
2015-09-01;
2015-12-24 Received date:2015-09-01;Revised date:2015-12-24
**通信作者:jiangwenfeng1982@126.com Corresponding author:jiangwenfeng1982@126.com
