非完整轮式车辆路径跟踪控制
2016-10-26李小楠
李小楠,于 浩
(1.中国交通通信信息中心,北京 100011;2.万华化学集团股份有限公司,山东 烟台264000)
非完整轮式车辆路径跟踪控制
李小楠1,于浩2
(1.中国交通通信信息中心,北京 100011;2.万华化学集团股份有限公司,山东 烟台264000)
针对非完整轮式车辆路径跟踪存在算法复杂的问题,提出一种改进的基于引导角的路径跟踪算法;根据设计和实验中所描述的路径跟踪问题,提出一种参数曲线路径的跟踪方法。在期望位置建立路径原点坐标系,同时为角度误差设计一个引导角,并在路径坐标系中计算跟踪控制误差,利用Backstepping回归设计理论设计跟踪控制律和路径参数变更律,使得侧向误差随角度误差收敛。经过仿真实验,车辆在短暂的跟踪调整后迅速跟进了预设定路径,其路径误差迅速趋近于零,证明该路径跟踪算法的有效性。
路径跟踪;运动控制;轮式移动;Backstepping
0 引言
移动控制的建立和使用已经有很长的历史,其中轮式移动在各种实际应用中最为常见,例如轮式结构的自动导引车(Automatic Guided Vehicle),被广泛应用于生产、装配线以及物流仓库。目前,围绕轮式移动控制问题的主要研究方向是轨迹跟踪和路径控制跟踪[1]。路径跟踪(Path Following)的目标是控制移动机器人按预先给定的速度跟踪一条几何路径且对所要跟踪的位置无时间要求;轨迹跟踪(Trajectory Tracking)的目标是控制移动机器人跟踪[2]一条以时间为参数的几何轨线,也可以看作一个虚拟的移动目标,如文献[3-4]所属控制移动机器人自适应跟踪该虚拟目标行进。轨迹跟踪与路径跟踪问题的核心区别在于是否存在时间约束以及是目标跟踪还是路径控制。在路径设计规划问题中,依据目前参考路径主要表示方法是基于隐式方程和参数方程2种,相关文献[5-6]在基于隐式方程表示的参考路径设计路径跟踪控制律,和文献[7]在基于参数方程表示的路径设计跟踪控制律,均存在控制奇异点,如当机器人运动速度方向与路径法线平行时,即闭环系统不是全局渐近稳定的。而文献[8-9]所设计的路径跟踪控制律实质上仍是轨迹跟踪控制律。文献[10-12]对水面船舶路径跟踪问题进行了研究,提出了一种制导理论,文献[13]应用该制导理论设计了基于运动学模型的移动机器人全局路径跟踪控制律。
本文研究移动轮式车辆的路径跟踪控制问题。受文献[13]启发,使用Backstepping回归设计理论[14],提出一种跟踪参数曲线路径的方法,该方法的核心是制导理论,也就是通过角度差的变化,控制移动车辆在移动轨迹中与预设路径的侧向差值变化趋同;此方法有效地规避了传统基于隐式方程和参数方式表述路径控制中的奇异点问题;同时,更加突显了的通过路径控制实现了路径跟踪,避免了通过轨迹跟踪的理念实现路径跟踪控制的问题。
1 空间建模
设计一条几何曲线作为预设路径,使得车辆根据预设路径路径进行跟踪行驶,行驶过程无时间要求。如图1所示,在惯性坐标系OXY中,将Pr作为预设行驶路径出发点,即原点建立路径坐标系PrXpYp,其中预设路径在Pr点处的切线方向为Xp轴,垂直方向为Yp轴。
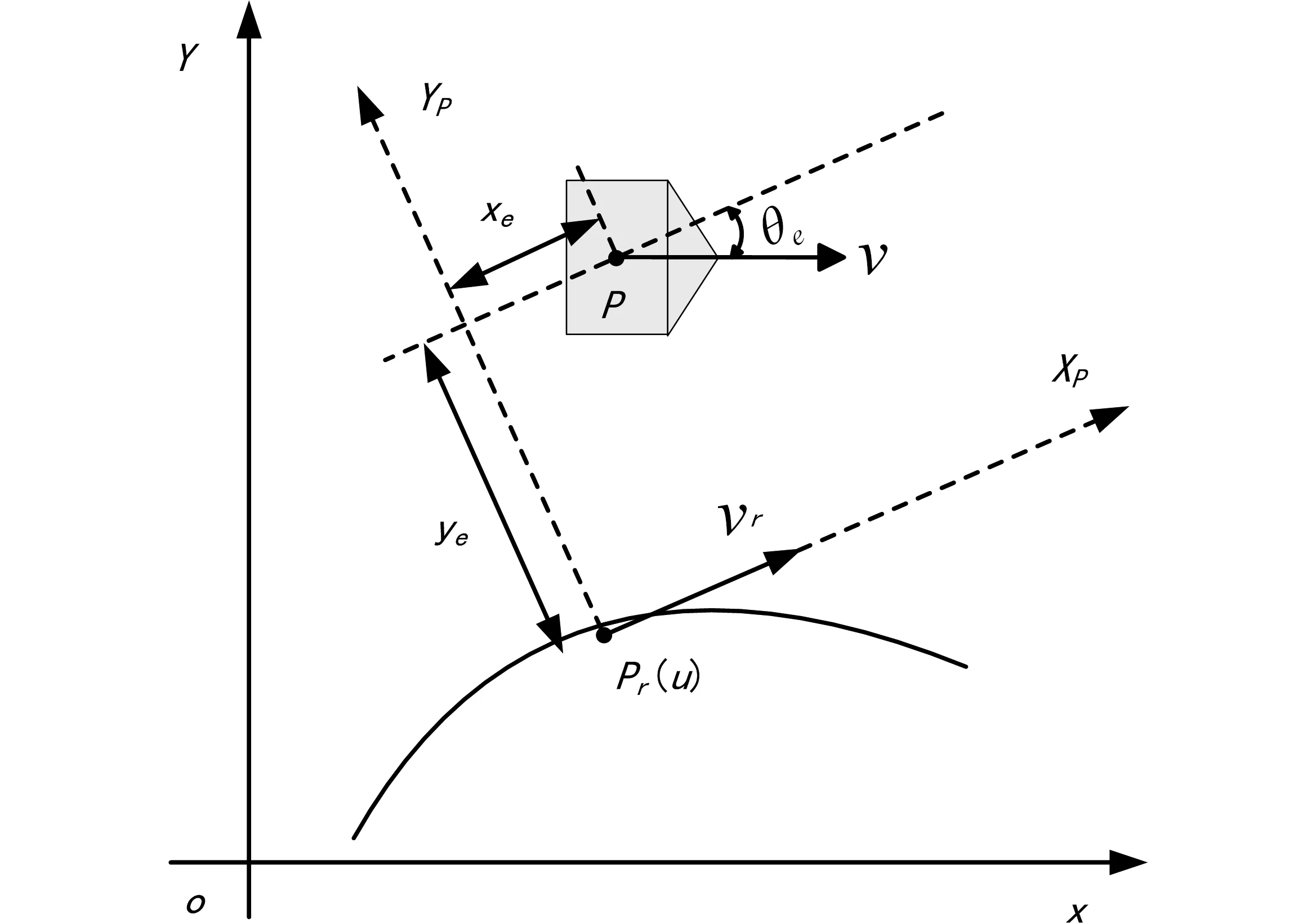
图1 车辆的路径跟踪

(1)

(2)
(3)
式中,vr为路径坐标系下的速度表达式,根据上式可确定关系如下:

(4)

(5)

(6)
则实际车辆位置及方向p与预设路径点位置及方向pr(u)的误差表达为:
(7)
当预设路径点Cr(u)为连续函数,则只需设计控制函数使得当t→时有‖pe‖→0,即误差函数收敛于预设路径上。
2 路径跟踪控制
依据回归设计理论设计跟踪控制律和路径参数变更律,主要通过Backstepping设计实现。

(8)
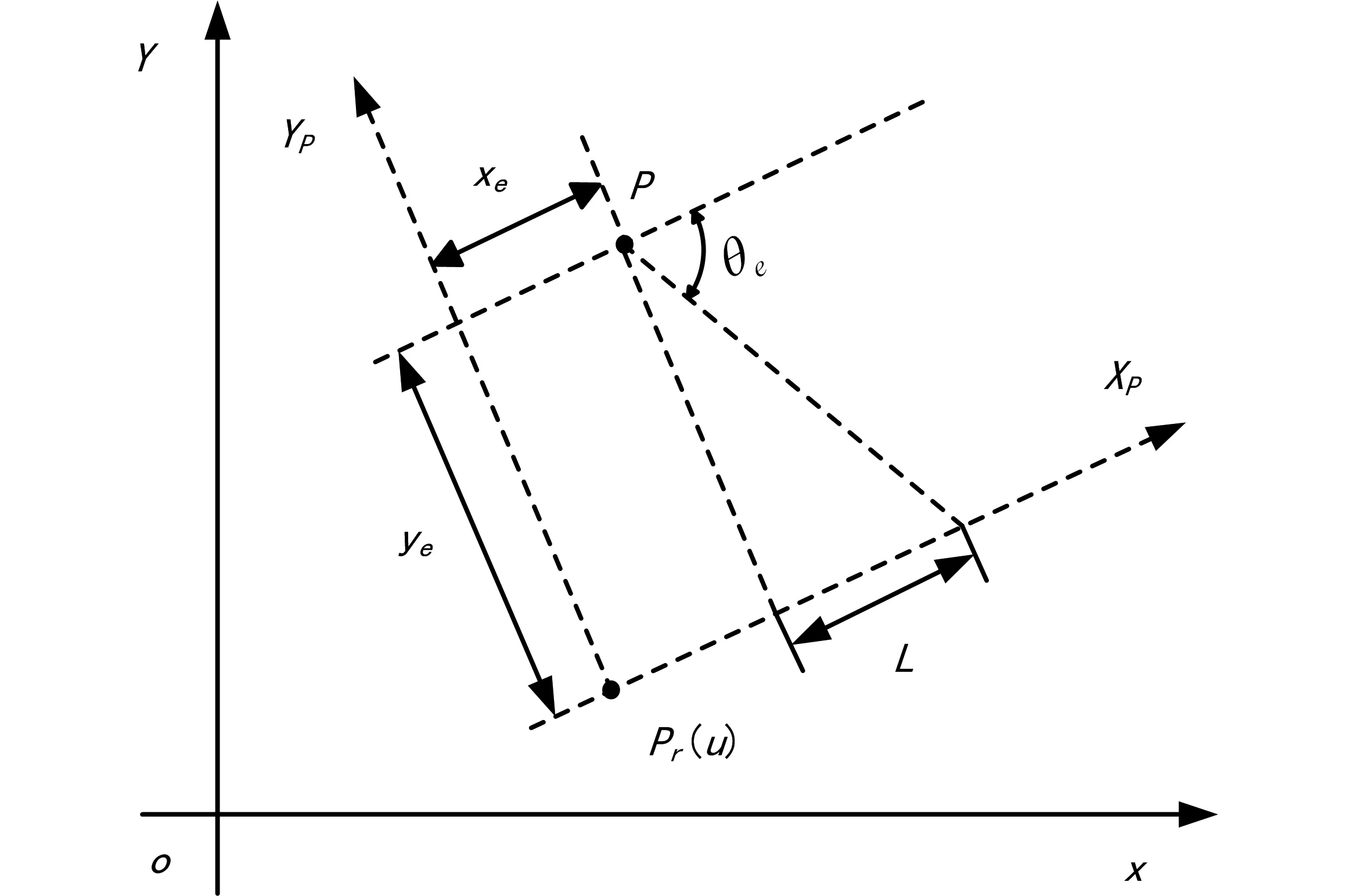
图2 引导角示意
将arctan(-ye/L)称作引导角,在侧向误差ye未收敛时,将
(9)

步骤2:定义θz为实际角度误差θe和引导角arctan(-ye/L)之差,对时间求导后,表达角度差变化率为:
(11)
(12)
设定控制参数k2>0,则式(11)可表达为:

(13)

(14)
在(0,π/2)区间内,选择一个角度θx,当|θz|>θx,则存在时间t1满足t1≥t0≥0,并使得当t>t1时有|θz|<θx。根据姿态和输入均是有界的,所以在时间t∈[t0,t1]段内,xe,ye与θz有界。
当|θz|<θx时,令cosθx=α,此时有α>0和cosθz>α。根据式(14),有
式中,β为任意正数。可得到

(15)

因此,当选取角速度:

路径参数u的更新律为:

同时控制参数的选取满足Lv<4k2α,则路径跟踪误差收敛。
3 仿真结果分析
以3次 Bezier曲线作为参考路径。参考路径的表达式为:

式中,路径参数u∈[0,1]。各控制点的坐标选取为:
[x0,y0]=[1,1],[x1,y1]=[6.5,2.8],
[x2,y2]=[16.8,6.2],[x3,y3]=[5,10]。
经过仿真实验,路径跟踪共用时8.4 s,路径跟踪的结果如图3所示。最终跟踪上了参考路径,如图4所示,跟踪误差均收敛至零。车辆运动的角速度如图5所示。
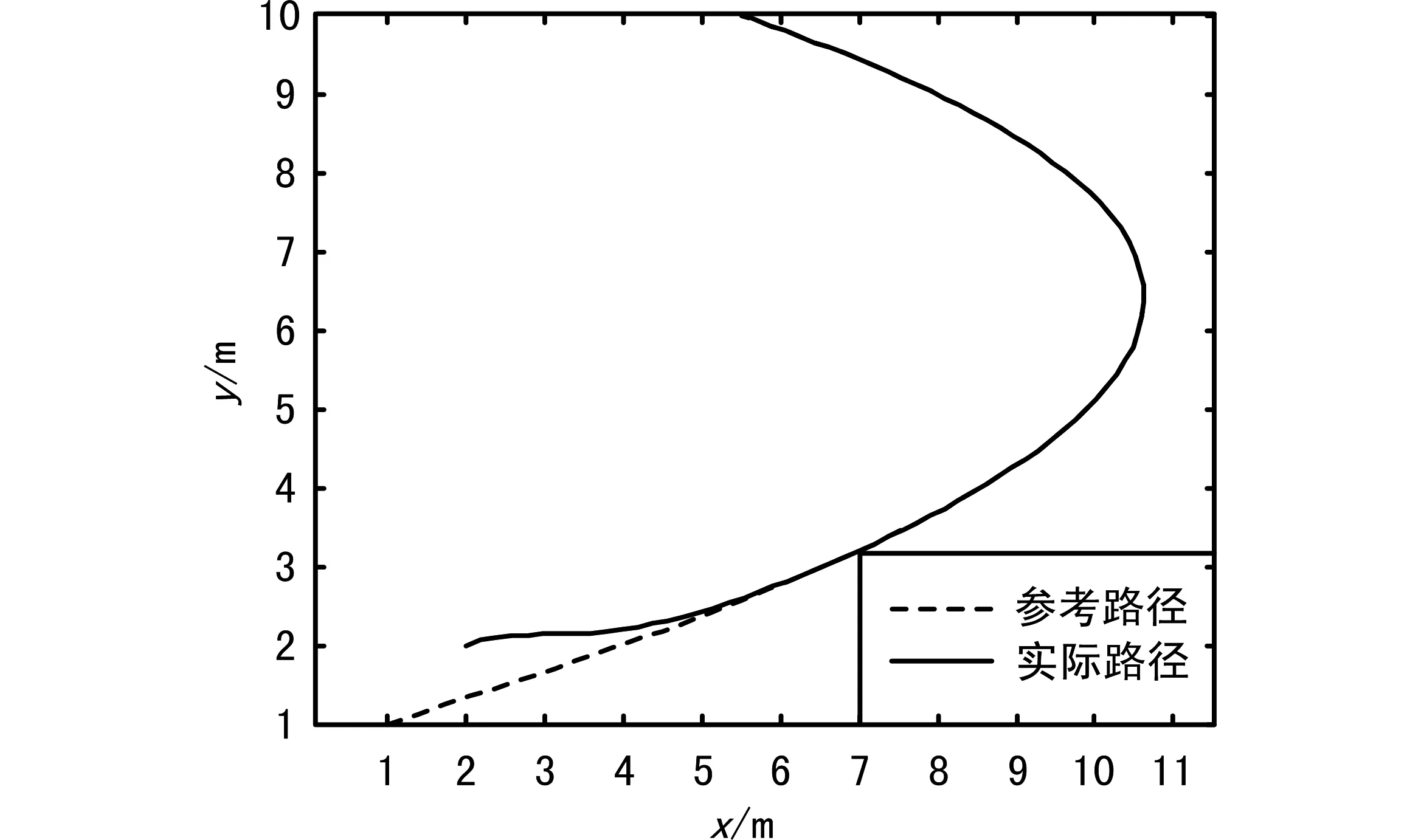
图3 路径跟踪结果
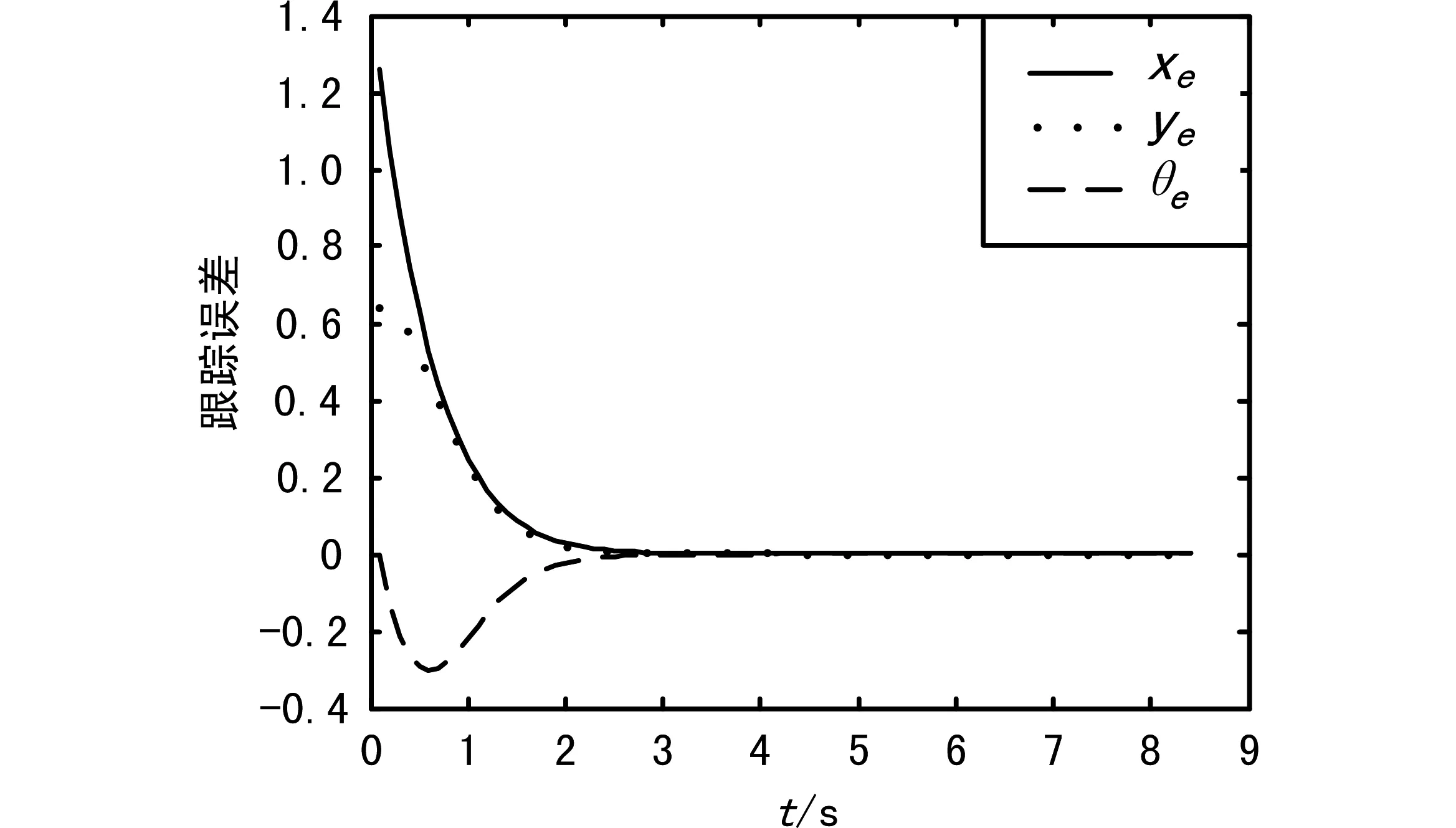
图4 路径跟踪误差
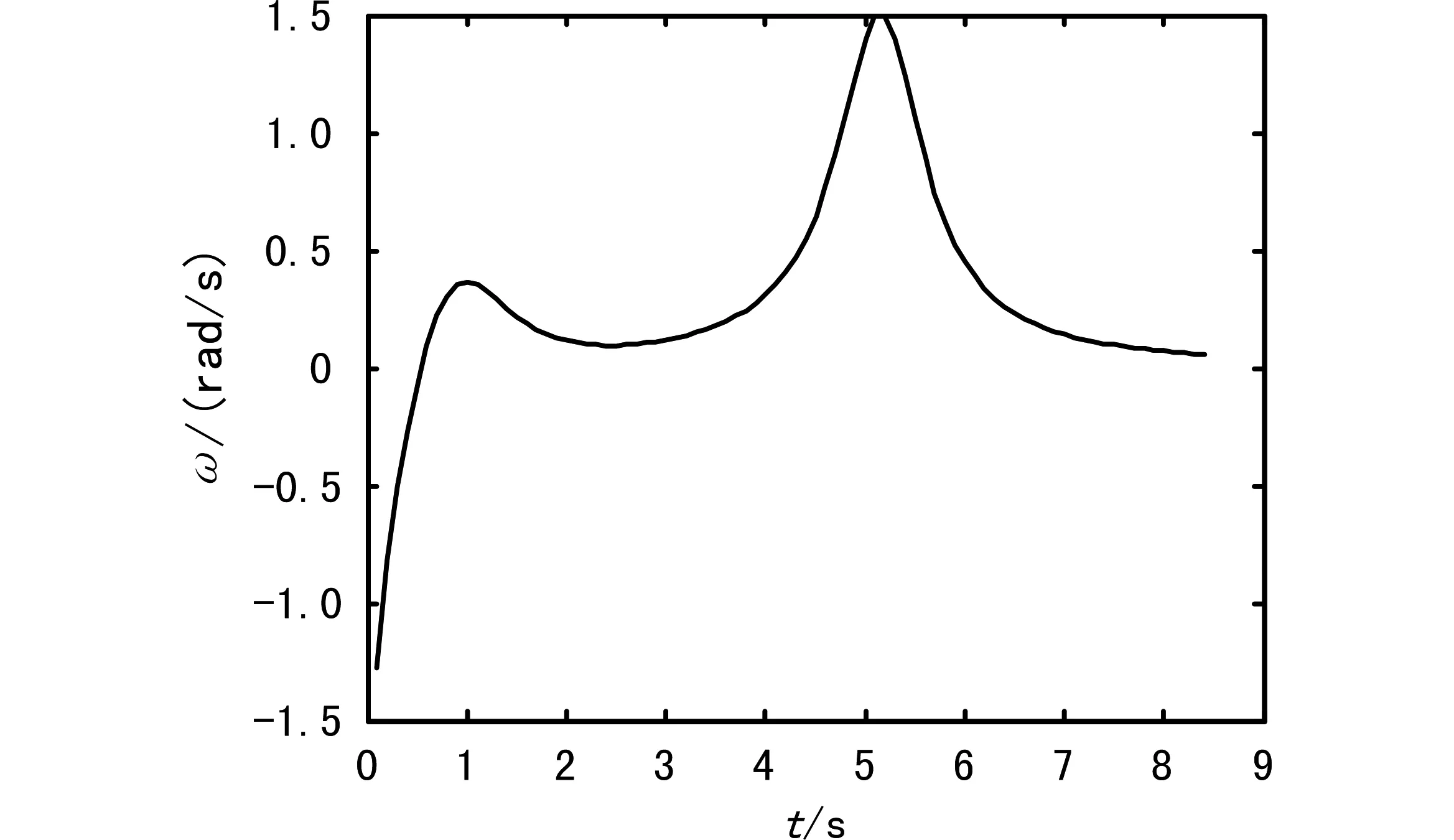
图5 角速度
与文献[13]的方法相比,本文提出了一种新的路径曲线的参数表示方法,并给出了参数选取规则及证明,实际上使得路径跟踪控制问题延伸扩展为跟踪参数曲线问题;实验中,车辆跟踪上路径的时间主要源于车辆线速度和角速度,与轨迹跟踪的时间约束有本质区别;经过一定的调整时间,即车辆行驶一定行程后,车辆跟踪了上了设定路径,并持续保持零误差状态;细观察实验结果,可以发现算法使车辆根据实际位置与预设路径进行角度和位置计算,从而以自有设定的线速度和角速度调整侧向误差的动态变化率,在路径跟踪过程中侧向误差一直趋小,而角度误差有较大起伏,体现了此算法在控制角度调整中,实现了对位置调整的核心目标,最终使得行进路径与预设路径的吻合。
4 结束语
本文基于轮式移动的运动学模型,研究了非完整轮式车辆的路径跟踪控制问题,通过用参数曲线描述的参考路径,然后根据侧向误差和角度误差的关系设计了引导角,控制表示跟踪误差。应用参数曲线的表示方式,使得移动车辆路径跟踪可以随用任意参数表示的路径进行控制,简化了控制方法;对于实际路径,可进行路径微化处理,将路径表示为一段段可参数表示的曲线,从而实现车辆路径跟踪。仿真结果,验证了设计的控制律的有效性,但没将动力驱动作为实验对象,理想化了动力学模型,为进一步完善研究的实用性,下一步将完善实验,考虑将研究工作扩展为基于动力学模型的移动车辆的路径跟踪控制问题。
[1]DE L A,ORIOLO G,VENDITTELLI M.Control of Wheeled Mobile Robots:an Experimental Overview[J].RAMSETE,Berlin:Springer,2001:181-226.
[2]崔明月,孙棣华,李永福,等.轮子纵向打滑条件下的移动机器人自适应跟踪控制.控制与决策[J],2013,28(5):664-670.
[3]孙棣华,崔明月,李永福.具有参数不确定性的轮式移动机器人自适应backstepping控制[J].控制理论与应用,2012,29(9):1 198-1 204.
[4]HOU Z G,ZOU A M,CHENG L,et al.Adaptive Control of an Electrically Driven Nonholonomic Mobile Robot via Backstepping and Fuzzy Approach[J].IEEE Transactions on Control Systems Technology,2009,17(4):803-815.
[5]马保离,霍伟.移动小车的路径跟踪与镇定[J].机器人,1995,17(6):358-362.
[6]孙多青,霍伟,杨枭.含模型不确定性移动机器人路径跟踪的分层模糊控制[J].控制理论与应用,2004,21(4):489-494.
[7]王栋耀,马旭东,戴先中.非时间参考的移动机器人路径跟踪控制[J].机器人,2004,26(3):198-203.
[8]苑晶,黄亚楼,孙凤池.带拖车移动机器人全局路径跟踪控制[J].控制与决策,2007,22(10):1 119-1 124.
[9]YUE M,HU P,SUN W.Path Following of a Class of Non-holonomic Mobile Robot with Underactuated Vehicle Body[J].IET Control Theory & Applications,2010,4(10):1 898-1 904.
[10]BREIVIC M,FOSSEN T I.Path Following for Marine Surface Vessels[C]∥In Proceedings of 2004 MTS/IEEE Oceans Conference,2004:2 282-2 289.
[11]BREIVIC M,FOSSEN T I.Principles of Guidance-based Path Following in 2D and 3D[C]∥In Proceedings of the 44th IEEE Conference on Decision and Control,and the European Control Conference,2005:627-634.
[12]BREIVIC M,FOSSEN T I.Guidance Laws for Planar Motion Control[C]∥In Proceedings of the 47th IEEE Conference on Decision and Control,2008:570 -577.
[13]郑泽伟,霍伟,诸兵.非完整移动机器人全局路径跟踪控制[J].控制理论与应用,2012,29(6):741-746.
[14]KANELLAKOPOULOS I,KOKOTOVIC P V,MORSE A S.Systematic Design of Adaptive Controllers for Feedback Linearizable Systems[J].IEEE Trans on Automatic Control,1991,36(11):1 241-1 253.
李小楠男,(1982—),硕士,工程师。主要研究方向:智能交通、运输组织及信息化。
于浩男,(1985—),博士,工程师。主要研究方向:计算机控制与仿真。
Path Following Control for Nonholonomic Wheeled Vehicls
LI Xiao-nan1,YU Hao2
(1.ChinaTransportTelecommunicationandInformationCenter,Beijing100011,China;2.WanhuaChemicalGroupCo.,Ltd,YantaiShandong264000,China)
An improved path following algorithm based on guidance angle is proposed to reduce the complexity of the nonholonomic wheeled vehicle routing.Based on path tracking described in design and experiment,a parametric curve path tracking method is proposed.In this method,a path origin coordinate system is established in a desired position,a guide angle is designed for the angle error,the tracking errors are calculated in path coordinates,the tracking control law and the path parameter change law are designed based on Backstepping regression design theory,and the lateral error is converged with the angle error.In the simulation experiment,the vehicle quickly follows up the preset path after a short track adjustment,the path error of vehicle is rapidly approaching to zero,which proves the effectiveness of the path tracking algorithm.
path following;motion control;wheeled mobile;Backstepping
10.3969/j.issn.1003-3106.2016.10.19
2016-07-12
TP391.9
A
1003-3106(2016)10-0078-05
引用格式:李小楠,于浩.非完整轮式车辆路径跟踪控制[J].无线电工程,2016,46(10):78-82.
