含周期性扰动补偿的机电伺服系统自适应控制*
2016-10-26张江华邹华杰邓文翔
张江华,邹华杰,邓文翔
(1.常州机电职业技术学院 机械工程学院,江苏 常州 213164; 2.南京理工大学 机械工程学院,南京 210094)
含周期性扰动补偿的机电伺服系统自适应控制*
张江华1,邹华杰1,邓文翔2
(1.常州机电职业技术学院 机械工程学院,江苏 常州213164; 2.南京理工大学 机械工程学院,南京210094)
针对执行周期性任务的机电伺服系统易受参数不确定性及外干扰的影响,为实现高精度跟踪性能和准确的参数估计,设计基于傅立叶级数近似的非线性自适应控制器。该非线性自适应控制器通过对呈现一定周期性的扰动进行傅立叶级数近似,采用自适应律自动更新与近似项相关的未知参数,实现对周期性扰动的精确补偿。对于其他任意非周期性的干扰,则采用含干扰上界估计的非线性鲁棒项抑制其不利影响。基于Lyapunov稳定性理论证明了闭环系统全局一致有界稳定,通过恰当选择设计参数及初始化误差变量,跟踪误差可收敛至零附近的任意小范围内。仿真结果表明,所提出的控制方法能有效的抑制参数不确定性及外部扰动,获得高精度的跟踪性能。
机电伺服系统;周期性;扰动补偿;自适应;非线性鲁棒
ZHANG Jiang-hua1, ZOU Hua-jie1, DENG Wen-xiang2
(1.School of Mechanical Engineering,Changzhou Institute of Mechatronic Technology, Changzhou Jiangsu 213164, China; 2. School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
0 引言
机电伺服系统由于其响应快、传动效率高及能源获取方便等突出优点,广泛运用于众多重要领域如数控机床、飞行控制和火力控制等。随着工业技术的发展,高精度的运动控制已成为现代机电设备的主要发展方向[1]。机电伺服系统是一个典型的非线性系统,易受参数不确定性及扰动的影响。因此,基于线性控制理论的PID控制器已不能满足高性能的需求,需要研究先进的非线性控制器设计。针对机电伺服系统的控制问题,许多方法被广泛讨论。基于参数不确定性和扰动变化范围已知的前提,文献[2-3]中采用的自适应鲁棒控制算法可保证机电伺服系统获得一致有界的跟踪性能。文献[4]中针对永磁同步电机设计的反馈线性化控制器可有效处理系统非线性特性,并采用线性鲁棒反馈抑制外负载干扰的不利影响。然而,当系统存在强扰动时,上述控制方法必须采用强反馈增益才能保证其理论性能。文献[5]指出,过强的反馈增益会增加闭环系统带宽、激发未建模的高频动态,致使系统失稳。实际上,工程应用中的机电伺服系统大多数都在执行周期性的任务,如机床加工工件等。基于此,重复控制[6]是处理此类控制问题的常用方法。然而,传统的重复控制器对噪声非常敏感,因此文献[7]在原基于内模原理的线性重复控制器中加入Q滤波器以增强系统在噪声存在的情况下的稳定性。文献[8]进一步指出,除了对噪声敏感的问题,传统的重复控制等价于不断地更新无穷多个参数,因此控制器的实际执行有巨大的内存需求,实际中难以实现。
为克服上述控制方法中的缺点,针对跟踪周期性参考信号的机电伺服系统,本文提出了一种基于傅立叶级数近似的非线性自适应控制方法。系统总扰动中呈现一定周期性的部分采用傅立叶级数近似,且相关未知参数用自适应的方法处理,其余任意非周期性的干扰则运用非线性鲁棒反馈控制律予以抑制。仿真结果验证了所提出控制方法的有效性。
1 问题提出
本文所考虑的机电伺服系统原理图如图1所示。其中伺服电机通过驱动器驱动直接带动惯性负载旋转。由于所采用的伺服驱动器是成熟的商业驱动器,其内固化有电流环控制器。另外,考虑到电气部分响应速度远高于机械部分,故可忽略电流环动态,将其简化成比例环节[1-3,5]。由牛顿第二定律可得:
(1)

图1 机电伺服系统位置控制原理图
为提高摩擦补偿的精度,采取如下的静态连续摩擦模型[9]:
(2)

d(x1,x2)+δ(t)
(3)
式中:未知参数向量θ=[θ1,θ2,θ3,θ4]T,且θ1=ku/J,θ2=a1/J,θ3=a2/J,θ4=a3/J;Sf(x2)=tanh(c1x2),Pf(x2)=tanh(c2x2)-tanh(c3x2),d(x1,x2)=f(x1,x2)/J;δ(t)=Δ(t)/J。
控制器的设计目标为:给定系统参考角度信号yd=x1d(t),设计一个有界的连续控制输入u使得系统输出y=x1跟踪参考角度信号的误差趋于零或在期望的范围内,在控制器设计之前,先作如下假设:
假设1:系统位置指令信号是二阶连续可微的,且其各阶导数都有界。
假设2:扰动项d(x1,x2)对x1,x2的偏微分存在且有界,任意外干扰项δ(t)有界即:
(4)
2 自适应控制器设计
2.1系统设计模型
由于本文考虑机电伺服系统执行周期性任务,即跟踪周期性的角度指令信号,则只与状态相关的扰动项d(x1,x2)也呈现一定的周期性,而δ(t)可以是任意非周期性的。因此式(3)可以写成如下形式:
(5)
Dd(t-T)=Dd(t)
(6)
式中:T为已知位置指令的最小正周期。
采用傅立叶级数对周期性的非线性函数Dd(t)进行近似可得:
(7)
式中:ω=2π/T。由于机械系统等价于一个具有有限带宽的低通滤波器,因此Dd(t)可以用式(7)中的有限频率部分表示,即在实际中,式(7)中的有限项傅立叶级数可以很好地近似Dd(t)[7]:
(8)
定义Θ=[A0/2,A1,B1,...,Am,Bm]T为未知的常值参数向量,则基于式(5)和(8)可得系统的设计模型为:
ΘTΦ+δ(t)+Ξ
(9)
式中:Ф=[1, cosωt, sinωt, ..., cosmωt, sinmωt]T。
2.2控制器设计
定义如下误差变量:
(10)
式中:z1=x1-x1d为系统的跟踪误差;α1为状态x2的虚拟控制律;z2为x2与α1之间的偏差,k1为正的反馈增益。
由式(10)可知,Gp(s)=z1(s)/z2(s)=1/(s+k1)是稳定的传递函数,如果z2趋于零,则z1也趋于零。结合式(9)和(10)可得:
(11)
定义Lyapunov函数:
(12)
对函数V0求导可得:
(13)
结合根据拉格朗日中值定理及假设2,有:
(14)
式中:c1,c2为已知正数。
另外,采用如下不等式性质:
(15)
式中:ε>0,η为任意实数,kp=0.2758。则式(13)可写成:
(16)
设计实际的控制输入u为:

(17)
参数估计由以下自适应律更新:

Θ^·=ΓΘ(Φz2-β2Θ^)

(18)
式中:φ=[u, -x2, -Sf(x2), -Pf(x2)]T,Гθ, ГΘ,γ为正的自适应增益,β1、β2、β3为大于零的常数。
3 稳定性证明
控制器性能:对于由式(9)描述的跟踪周期性位置指令的机电伺服系统,采用自适应控制器(17)及参数自适应律(18),合理选取控制增益k1,k2可保证机电伺服系统的跟踪误差渐近收敛至零附近任意小的范围内,且闭环系统所有信号都有界。
稳定性证明:定义新的Lyapunov函数
(19)
对式(19)求对时间的导数并结合式(16)及控制输入(17)可得:
(20)
式中:ks1=k1-(c1+1)/2,ks2=k2-c2-(c1+1)/2。
结合式(18)中的自适应律可得:
(21)
式(21)为一阶微分方程,根据文献[10]中针对有界稳定的情况的讨论,解此微分方程可知式(19)中定义的Lyapunov函数具有如下的上界:
(22)

4 仿真结果与分析
机电伺服系统负载转动惯量J=0.01kg·m2,力矩放大系数ku=5N·m/V,阻尼系数a1=1.025N·m·s/rad,库伦摩擦幅值a2=0.1 N·m·s/rad,静摩擦与库伦摩擦的差值a3=},形状系数c1=700,c2=15,c3=1.5,周期性的扰动项δ(x1,x2)=(10x1+20x2) N·m,其他外干扰项Ξ=5sintN·m,仿真采样周期为Ts=0.2ms。
为充分考核本文所设计的控制算法的有效性,选取工程实际中大量使用的PI控制器以及不含周期性扰动补偿的反馈线性化控制器进行仿真对比。

(2)FLC:反馈线性化控制(Feedback Linearization Control)。反馈线性化控制不含对周期性的扰动的补偿,用以验证所提出控制算法中扰动补偿的有效性。FLC控制器设计为:
(23)
式中θ1n,θ2n,θ3n,θ4n为系统参数的名义值。其控制增益也取为k1=100,k2=50。
(3)PI:工程中广泛运用的比例积分控制器。该控制器的各参数在Matlab自带的工具箱自整定的基础上进行微调获得。
给定系统的参考角度指令信号选取为:x1d(t)= sinπt·[1-exp(-0.01t3)] rad。图2和图3分别为本文提出的NAC控制器作用下系统角度跟踪性能和三种控制器分别作用时的跟踪误差对比。从图2中可以看出,在NAC控制器作用下,机电伺服系统的惯性负载可以很好地跟踪给定的角度指令信号,其稳态跟踪误差不超过2×10-5rad。在初始阶段,由于参数估计初值的选取远离其真值,使得暂态跟踪性能偏大,但是随着参数估计逐渐收敛,其跟踪误差也逐渐减小。由图3可知,基于模型的FLC控制器获得了比PI控制器更好的跟踪性能,说明了模型补偿设计的有效性;但是,FLC和PI控制器的跟踪性能均比NAC控制器要差,由此验证了NAC控制器中对周期性的扰动补偿的有效性。
图4给出了系统未知参数估计随时间变化的曲线,图5是与周期性扰动近似项相关的未知参数估计。从图4可知系统未知参数的估计较好地收敛至其真值,这也是跟踪误差逐渐减小的原因。图5中的参数估计也可很好地收敛,说明NAC控制器对周期性的扰动可精确补偿,从而提升系统跟踪性能。图6为NAC控制输入电压以及其他任意干扰的上界估计。
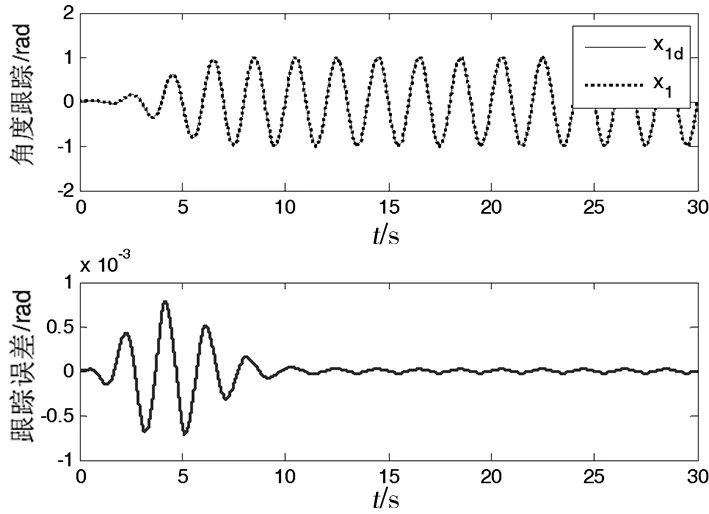
图2 NAC控制器作用下系统角度跟踪及跟踪误差
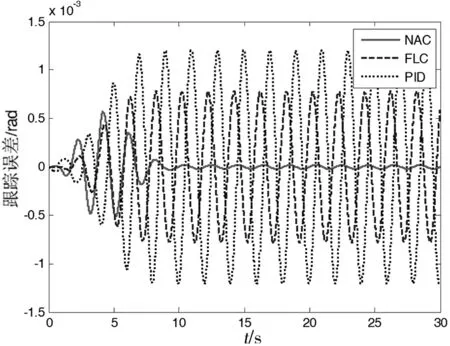
图3 三种控制器跟踪性能对比

图4 系统未知参数的估计

图5 周期性扰动近似项的参数估计
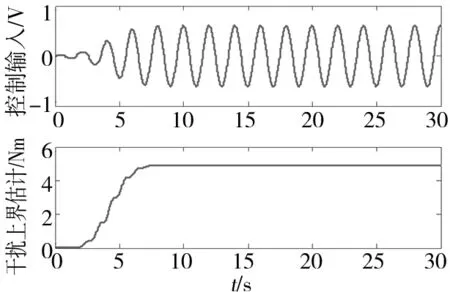
图6 NAC控制输入电压及干扰上界估计
5 总结
本文针对执行周期性任务的的机电伺服系统控制问题,提出了基于傅立叶级数近似的非线性自适应控制方法。该控制方法利用跟踪周期性角度指令时的部分扰动也会呈现一定的周期性的性质,采用傅立叶级数对其近似处理,进而运用自适应的方法在控制器设计中进行扰动补偿。此外,无需知道未知非周期性的扰动的上界信息,而是采用含上界估计的非线性鲁棒控制律予以抑制。所提出的控制方法避免了传统重复控制对噪声敏感及内存需求大的缺点,同时有效的扰动补偿可以较小的反馈增益获得很好的跟踪性能。
[1] 吴跃飞,马大为,姚建勇,等. 基于修正LuGre模型的自适应鲁棒控制在机电伺服系统中的应用[J].机械工程学报,2014,50(22):207-212.
[2] 孙宜标,刘春丽,王丽梅,等. 永磁环形力矩电机期望补偿自适应鲁棒控制[J].组合机床与自动化加工技术,2012(6):71-74.
[3] Z Chen, B Yao,Q Wang. μ-synthesis based adaptive robust control of linear motor driven stages with high-frequency dynamics: a case study with comparative experiments[J]. IEEE/ASME Transactions on Mechatronics, 2015,20(3): 1482-1490.[4] 刘小河,王鹤华. 基于SVPWM永磁同步电机反馈线性化控制[J].现代电子技术,2013,36(12):159-162.
[5] J Yao, Z Jiao, D Ma. Adaptive robust control of dc motors with extended state observer[J].IEEE Transactions on Industrial Electronics, 2014, 61(7): 3630-3637.
[6] Zhu Q, Xu J, Yang S, et al. Adaptive backstepping repetitive learning control design for nonlinear system discrete-time systems with periodic uncertainties [J]. International Journal of Adaptive Control and Signal Processing, 2015, 29(4): 524-535.
[7] M Tomizuka, T C Tsao,K K Chew. Analysis and synthesis of discrete time repetitive controllers[J]. ASME Journal of Dynamic System Measurement Control, 1989, 111(3): 353-358.
[8] C Hu, B Yao, Z Chen et al. Adaptive robust repetitive control of an industrial biaxial precision gantry for contouring tasks[J]. IEEE Transactions on Control Systems Technology, 2011, 19(6): 1559-1568.
[9] J Yao, Z Jiao, D Ma. RISE-based precision motion control of dc motors with continuous friction compensation[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 7067-7075.
[10] H Khalil. Nonlinear Systems[M]. Upper Saddle River, NJ, USA: Prentice-Hall, 2002.
(编辑李秀敏)
Adaptive Control of Mechatronic Servo System with Periodic Disturbance Compensation
For mechatronic servo systems performing periodic tasks and being typically subjected to parametric uncertainties and external disturbances, a Fourier series approximation based nonlinear adaptive controller is designed to achieve high precision tracking performance and accurate parameter estimation. The Fourier series is utilized to approximate the disturbances which show certain periodicity in the nonlinear adaptive controller design, and then the corresponding unknown parameters are updated by adaptive law to achieve accurate compensation for periodic disturbances. The nonlinear robust term which contains the upper bound estimate of disturbance is used to attenuated the adverse effect of other arbitrary non-periodic disturbances. The global uniformly bounded stability of the closed-loop system is proved based on Lyapunov stability theory, and the tracking error can converge to a small neighborhood around zero by properly choosing design parameters and initial error variables. Simulation results show that the proposed control scheme can effectively suppress the parametric uncertainties and external disturbances and obtain high precision tracking performance.
mechatronic servo system; periodicity; disturbance compensation; adaptive; nonlinear robust
1001-2265(2016)09-0074-04DOI:10.13462/j.cnki.mmtamt.2016.09.021
2016-02-12;
2016-02-26
江苏省普通高校研究生科研创新计划项目(KYLX_0334)
张江华(1973—),男,浙江东阳人,常州机电职业技术学院副教授,硕士,研究方向为机电一体化技术,(E-mail)zhj88000@163.com;
邹华杰(1988—),男,湖北仙桃人,常州机电职业技术学院讲师,博士,研究方向为机电伺服技术,(E-mail)zouhuajie_cimt@163.com。
TH165;TP273
A
