基于相机垂直拍摄的机车轮轨相对横移检测系统
2016-10-25王永胜宋子彬马增强
钟 莎, 王永胜, 宋子彬, 马增强
(1.广州铁路(集团)公司 怀化机务段,湖南 怀化 418000;2. 石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043)
基于相机垂直拍摄的机车轮轨相对横移检测系统
钟莎1,2,王永胜2,宋子彬2,马增强2
(1.广州铁路(集团)公司 怀化机务段,湖南 怀化418000;2. 石家庄铁道大学 电气与电子工程学院,河北 石家庄050043)
为了检测机车动力学性能参数及监测机车运行状态,当前通常采用了基于传感器的接触式测量方法,因而存在动态测量困难、零漂大和抗干扰能力差等缺点。轮轨接触点位置变化能直观的反映出机车运行状态,所以设计了一套基于相机垂直拍摄的机车轮轨相对横移检测系统。该系统将相机垂直安装在转向架上,利用相机相对于转向架保持相对静止的特点,通过轨道在图像中的坐标变化来测量轮轨的相对横向位移,并分别在无砟和有砟轨道两种不同条件下实现了机车轮轨相对横移检测、数据显示和存储。实验结果表明,该系统不仅能显示轮轨相对横向位移,而且对检测环境有较强的适应性,这对进一步探索和评价机车运行安全性机理有重要意义。
机车运行状态;轮轨接触点;轮轨相对横移
0 引言
近年来,我国高速铁路技术发展迅速,它有着快捷、舒适的特性,给人们的生活带来了巨大的方便,也促进了国民经济的发展。但是,由于机车运行速度的不断增大,以及客运量的增加,导致列车轮轨间的互相作用更加剧烈,更容易引发磨损、疲劳和脱轨等故障。为了满足发展的要求和保障列车行驶的安全性,有必要对轮轨运动状态进行监测,而轮轨接触点的位置[1-2]能直接反映轮轨接触状态[3-4],所以监测、分析轮轨接触点的位置对探索脱轨的机理和监测车辆运行的稳定性、安全性[5-6]有着重要作用。为了分析轮轨接触点位置变化对机车安全性、稳定性的影响,关庆华[7]提出了用轮轨横移量的变化分析机车的脱轨危险,但没有实现具体的横移测量方法;肖杰灵等[8]把两个摄像机安装在钢轨两侧,然后利用图形拼接的方法获得轮轨接触曲线用以检测轮轨接触状态,但图形拼接技术会增大检测误差;杨淑芬等[9]建立了以 DSP 为核心的轮轨接触点硬件和软件检测系统以得到轮轨边缘的轮廓,最终实现轮轨接触点位置的在线连续测量,但摄像机安装位置导致测量不全面;侯茂锐等[10]在转向架稳定性计算方法研究中提出了以轨接触点横移量判断轮对运动是否出现等幅周期震荡的极限环运动;孙丽霞[11]分析了车轮抬升量、轮轨接触角等随轮对横移量的变化情况,将轮对横移量、车轮抬升量和轮轨接触角进行对比分析脱轨安全限值;王彩芸,王文健等[12]分析了横移量和摇头角对轮轨滚动接触行为的影响,为研究轮轨滚动接触疲劳提供了参考价值,但都没有讨论横移具体测量方案。
以机车轮轨相对横向位移变化检测为研究目的,搭建一个基于Qt的数字图像检测系统,将相机垂直安装在转向架上,利用相机相对于转向架保持相对静止的特点,通过轨道在图像中的坐标变化来测量轮轨的相对横向位移,实现数据的显示和存储,这对进一步开展监测列车运行的状态及运行安全性机理的探索和研究提供了重要信息。
1 机车轮轨相对横移检测系统设计
1.1检测系统的组成及工作流程
检测系统包括了硬件系统和软件系统。硬件系统包括了摄像机、直流电源、图像采集盒、工控机等。软件系统是在Linux系统上,搭建一个基于Opencv的Qt环境,该环境主显示界面如图1所示。然后在该环境下进行钢轨的图像检测、横移计算及动态显示,整个轮轨横向位移检测系统的工作流程如图2所示。

图1轮轨横向位移检测系统的主显示界面

图2 检测系统工作流程
1.2检测系统设计原理
机车运行时,车轮与轨道互相碰撞产生横向作用力,导致轮轨接触点位置发生改变。忽略转向架与车轮之间的微小运动并将其视为一体化,转向架相对于轨道的位移变化可以用来反映轮轨接触点位置变化。把摄像机安装在车轮后边的转向架上且使摄像机的光轴垂直于轨道平面,并保证摄像机相对于转向架是固定不动的,其安装示意图如图3所示。机车运行的初始时刻,记录图像中轨道的初始位置,当机车运行中转向架与轨道产生相对横移时,轨道在图像中的位置会发生变化,这就是基于相机垂直拍摄的轮轨相对横移检测方法所依据的原理。
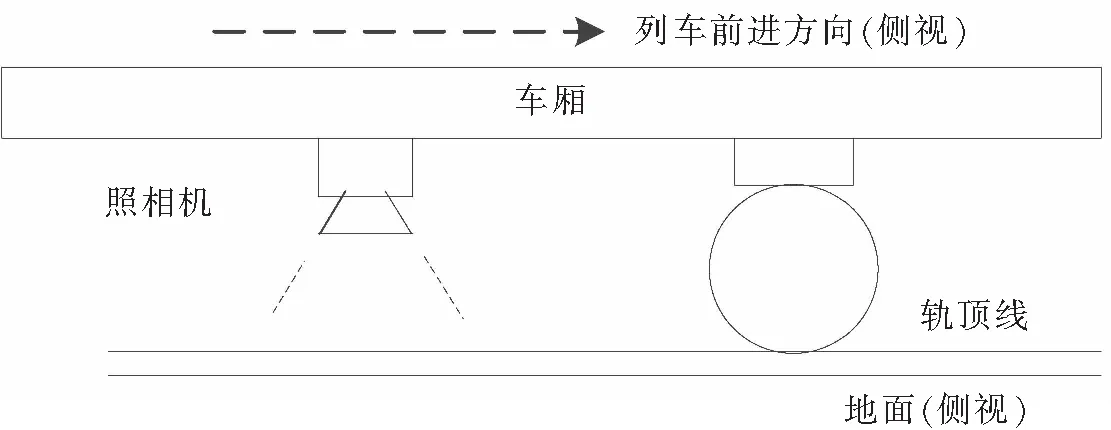
图3 基于摄像机垂直拍摄的安装示意图
(1)机车运行中与轨道没有冲角时,位移检测原理如图4所示。当转向架与轨道产生相对横移时,轨道在图像中的位置会发生变化;而产生垂直位移时,一侧轨道在图像中的宽度会发生变化。在图4中,以图像的中心位置为标准,初始定义图像横向位移SX是OK,当机车前行发生偏移时,此时的图像横向位移变成了O1K1,定义OK-O1K1是图像上轮轨发生的相对横向位移。

图4 无冲角时轮轨相对横向位移检测原理
(2)机车运行中与轨道有冲角时,位移检测原理如图5所示。但是由于冲角很小可以忽略不计,所以有冲角计算原理和无冲角时轮轨位移检测原理一样。

图5 有冲角时轮轨相对位移检测原理
2 轨道图像检测
为了准确地提取出图像上的轨道边缘线和消除图像上一些噪声点,以无砟条件下轨道图像检测为例,采用MeanShift算法利用概率密度的梯度爬升来寻找局部最优以达到轨道清晰的分割。该算法是一个迭代过程,即先算出当前点的偏移均值,移动该点到其偏移均值,然后以此为新点继续移动直到满足条件结束。给定d维空间Rd的n个样本点xi,i=1,…,n,在x点的Meanshift向量的基本形式定义为
(1)
式中,Sk是一个半径为h高维球区域,满足以下关系的y点的集合,
(2)

图6 Meanshift算法示意图
在公式(1)中,k表示在这n个样本点xi中,有k个点落入Sk区域中,(xi-x)是样本点xi相对于x的偏移向量,而Meanshift向量Mh(x)就是对落入区域Sk中的k个样本点相对于点x的偏移向量求和然后再平均。假如样本点xi是从一个概率密度函数f(x)中采样得到,由于非零的概率密度梯度指向概率密度增加最大方向,因此,Sk区域内的样本点更多地落在沿着概率密度梯度方向,而Meanshift向量也指向概率密度梯度方向即样本分布最多区域,其示意图如图6所示。
轨道图像经过Meanshift算法处理后结果如7(b)图所示,能够有效地分割出轨道图像,从而确定轨道区域,以达到轨道边缘提取的目的。
Meanshift算法处理结果经过灰度处理后,采用了Sobel边缘检测算法进行边缘提取。该算法是一种比较成熟的微分边缘检测算法,不仅计算简单,对噪声具有一定的平滑作用,还能提供较为精确的边缘方向信息。Sobel边缘检测算法是先利用公式(3)中水平算子和公式(4)垂直算子对图像进行卷积求取邻域中心点的一阶导数值Gx和Gy
(3)
(4)
而邻域中心点处的梯度值计算
(5)
如果中心点梯度值g≥T,则该位置的一个像素是一个边缘像素,其中T是门限阈值。 图9是Sobel算子检测的结果。
图像经二值化后,采用了基于hough变换的直线检测,利用了点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点,把原始图像中给定的曲线的检测问题转化为寻找参数空间中的峰值问题,同时检测整体特性转化为检测局部特性。图10是基于hough直线检测的结果。

图7 Meanshift算法处理结果
(a)图像邻域(b)Sobel算子
图8Sobel边缘检测器
图9 基于sobel边缘检测结果
3 实验数据处理与误差分析
为了测试基于相机垂直拍摄的机车轮轨相对横移检测系统的性能,本实验将该系统分别应用于无砟轨道和有砟轨道两种不同情况下的机车轮轨相对横移检测。轮轨相对横移误差定义为检测数据与实际数据之差,由于检测数据是图像上的像素值,转为实际距离得先计算图像采集时图像距离与实际距离的比例关系。
3.1无砟轨道条件下的轮轨相对横移检测
在无砟轨道条件下进行机车轮轨相对横移检测,经过现场测量1像素对应实际距离约是0.04 cm。在软件系统分析中,检测系统图像数据处理界面如图11所示。经过软件测试分析,轨道横移图像检测误差如表1所示,该实验是以平行轨道上一条线为基准位置进行左右误差分析的。
从误差结果分析来看,右侧轨道横移图像检测平均误差是0.002 cm,左侧轨道横移图像检测平均误差是-0.002 cm。所以,该系统能较为精确地检测出轮轨的相对横向位移,这为探讨机车运行安全性机理奠定了基础。

图10 轨道图像检测结果

图11 无砟轨道条件下检测系统的数据处理界面

表1 无砟轨道条件下轨道横移图像检测误差 cm
3.2有砟轨道条件下的轮轨相对横移检测
在有砟轨道条件下进行机车轮轨相对横移检测,经过现场测量1像素对应实际距离约是0.03 cm。在软件系统分析中,检测系统图像数据处理界面如图12所示。经过软件测试分析,轨道横移图像检测误差如表2所示。

图12 有砟轨道条件下检测系统的数据处理界面
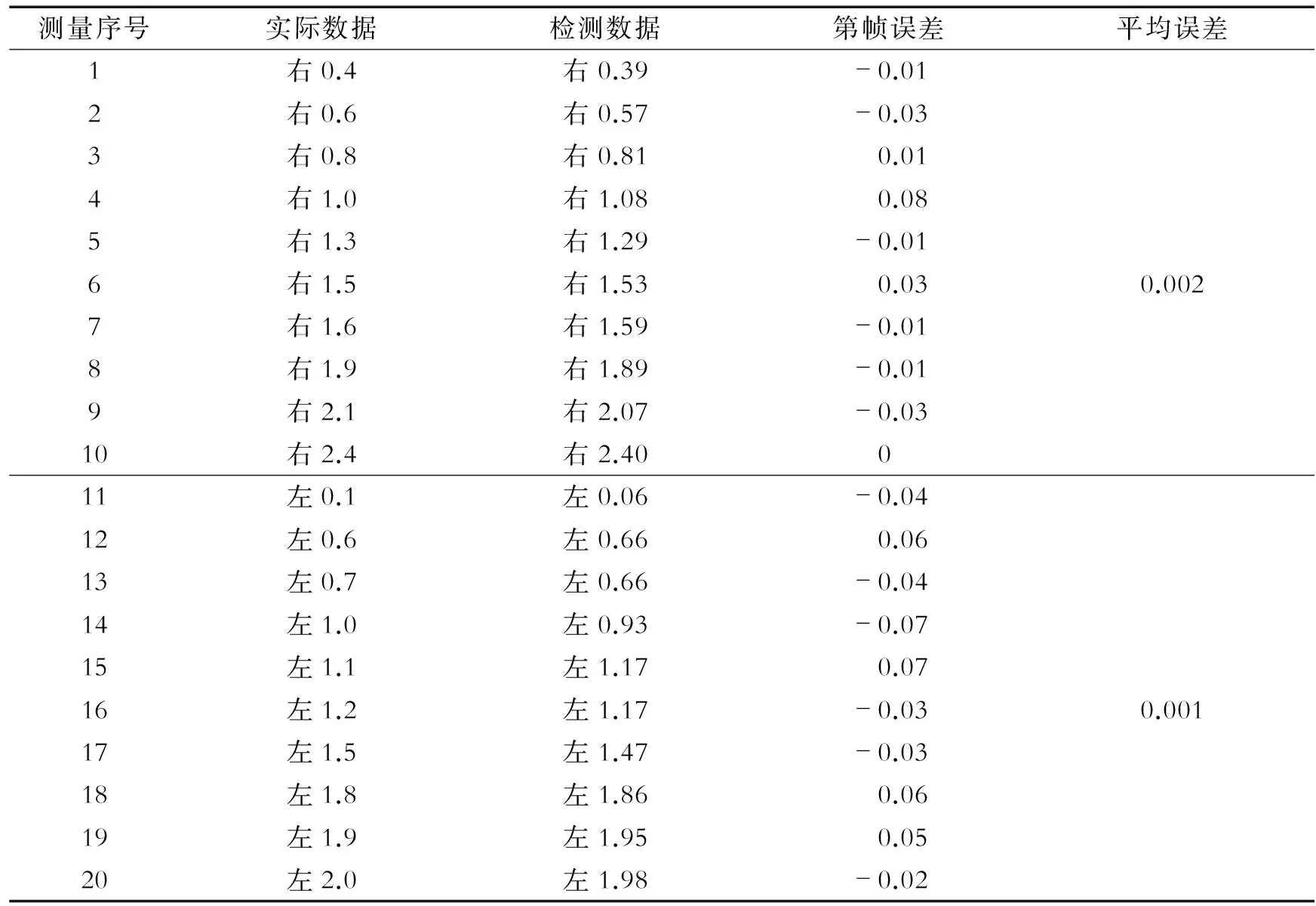
表2 有砟轨道条件下轨道横移图像检测误差 cm
从误差结果分析来看,右侧轨道横移图像检测平均误差是0.002 cm,左侧轨道横移图像检测平均误差是0.001 cm。实验结果表明,该系统不但能较为精确地检测出轮轨的相对横向位移,而且对轨道各种环境检测的适应性也很强。
4 结论
以机车轮轨相对横向位移变化检测为研究目的,搭建一个基于图像处理的检测系统,将相机垂直安装在转向架上,利用相机相对于转向架保持相对静止的特点,通过轨道在图像中的坐标变化来测量轮轨的相对横向位移,实现数据的显示和存储。实验结果表明,该系统分别在无砟和有砟轨道两种不同情况下进行机车轮轨相对横移检测,都取得较好的检测结果,这对进一步开展监测机车运行的状态及运行安全性机理的探索和研究提供了重要信息。
[1]程力.基于轮轨表达式的轮轨接触坐标计算方法[J]. 兰州工业学院学报, 2015,22(2):19-22.
[2]干锋,戴焕云. 基于空间矢量映射的新型轮轨接触点算法[J]. 机械工程学报,2015,51(10):119-128.
[3]钟浩.基于改善轮轨接触状态的重载车轮型面优化[D]. 成都:西南交通大学, 2014.
[4]魏云鹏,吴亚平,段志东,等. 列车蛇形运动状态下轮轨接触特性分析[J]. 铁道标准设计,2015,59(3):37-40.
[5]肖新标. 复杂环境状态下高速列车脱轨机理研究[D]. 成都:西南交通大学, 2013.
[6]李呈祥. 高速列车运行横移及侧滚姿态主动控制研究[D]. 北京: 北京交通大学, 2014.
[7] 侯茂锐,胡晓依,王成国.转向架失稳的非线性计算方法研究[J]. 铁道机车车辆, 2011,4(31):49-52.
[8]孙丽霞.高速列车横向运动稳定性和动态脱轨理论分析及评价方法研究[D]. 北京:中国铁道科学研究院,2014.
[9]王彩芸,王文健,郭俊,等.横移量、摇头角对轮轨滚动接触行为的影响研究[J]. 机械设计与制造,2012,12(12):31-33.
[10]关庆华. 列车脱轨机理及运行安全性研究[D]. 成都:西南交通大学, 2006.
[11]肖杰灵,刘学毅,张渝. 轮轨接触几何状态检测装置[J].中国铁道科学,2008, 29(4): 141-144
[12]杨淑芬,陈建政. 轮轨接触点位置图像检测方法研究[J].电力机车与城轨车辆, 2009,32(1): 34-37, 49.
The Detection System of Wheel-rail Relative Lateral Displacement Based on Camera Vertically Installed on Bogie
Zhong Sha1,2,Wang Yongsheng2,Song Zibin2,Ma Zengqiang2
(1.Guangzhou Railway (Group) Corporation Huaihua Locomotive Depot, Huaihua 418000,China;(2.School of Electrical and Electronics Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043,China)
The current contact measurement based on sensor is widely used in dynamic performance parameters detection for monitoring locomotive status. But it has several defects, such as being difficult to dynamic measurement, large zero drift and poor antijamming capability. The change of wheel-rail contact point is the most direct reaction for locomotive status. In order to overcome these defects of the current contact measurement, the detection system of wheel-rail relative lateral displacement based on camera installed on bogie vertically is designed in this paper. In the system, camera is installed on the bogie vertically and remains static to bogie, and the wheel-rail relative lateral displacement is measured by rail coordinate change in the image. Consequently, the system has functions of detecting wheel-rail relative lateral displacement, displaying data and storing data. The experiment results show that the system can acquire wheel-rail relative lateral displacement and has strong adaptability to the detection environment, and it has great important significance to further exploring and evaluating locomotive safety mechanics.
locomotive status;wheel-rail contact point;wheel-rail contact point
2015-10-27责任编辑:车轩玉DOI:10.13319/j.cnki.sjztddxxbzrb.2016.03.15
国家自然科学基金 (11372199,11572206),河北省自然科学基金(A2014210142)
钟莎(1991-),女,硕士研究生,主要从事计算机测控技术的研究。E-mail: banxiawei105@163.com
TP391.4
A
2095-0373(2016)03-0081-07
钟莎,王永胜,宋子彬,等.基于相机垂直拍摄的机车轮轨相对横移检测系统[J].石家庄铁道大学学报:自然科学版,2016,29(3):81-86.
