基于模糊控制的并联混合动力汽车能量控制策略研究
2016-10-25冯国胜牛晓燕胡志庆
马 良, 冯国胜, 牛晓燕, 胡志庆
(1.石家庄铁道大学 机械工程学院,河北 石家庄 050043;2.河北长鹿客车厂,河北 石家庄 050200)
基于模糊控制的并联混合动力汽车能量控制策略研究
马良1,冯国胜1,牛晓燕1,胡志庆2
(1.石家庄铁道大学 机械工程学院,河北 石家庄050043;2.河北长鹿客车厂,河北 石家庄050200)
简述了模糊控制的基本理论,以并联混合动力汽车蓄电池的荷电状态(SOC)和发动机转矩为控制目标,建立模糊控制器,并将其嵌入到ADVISOR软件中进行仿真分析。将模糊控制策略得到的仿真结果与电机辅助控制相比较,分析了模糊控制策略的优劣。
混合动力汽车;能量控制策略;模糊控制;SOC;ADVISOR
0 引言
并联混合动力汽车(PHEV)是发动机与电动机共同组成混合动力系统来驱动车辆行驶的一种新能源汽车。在混合动力汽车的国产化研制中,能量管理和电机控制是混合动力汽车控制系统的核心,如何实现以燃油经济性和排放性能为主要控制目标的能量管理控制和控制电机驱动系统输出相应的转矩,对开发国产混合动力汽车具有重要意义。电机辅助控制是混合动力汽车中最简单的控制策略,它通过对蓄电池组充电和放电区间进行简单的划分来完成发电机对电池充电和对发动机提供辅助动力,此控制策略较为简单,但是发动机工作效率较低,排放不理想。模糊控制策略有效的解决了发动机低效率工作的问题,通过对蓄电池的荷电状态SOC和发动机工作转矩的控制,使发动机在其最优转矩曲线范内工作,发动机工作效率较高,排放较低。
1 模糊控制系统的基本原理
模糊控制(Fuzzy Logic Control)是在1965年由美国加利福尼亚大学控制论专家Zadeh提出的,是一种基于人工经验的控制[1]。模糊控制的被控对象的数学模型可以不用过于精确,它的被控过程是依据专家的工作经验和专业知识,因此绕过了建模的困难。糊控制是以模糊集合,模糊语言变量及模糊逻辑推理为基础的一种非线性的控制,它隶属于智能控制的范畴。模糊控制系统包括模糊控制器和控制对象,其结构如图1所示。
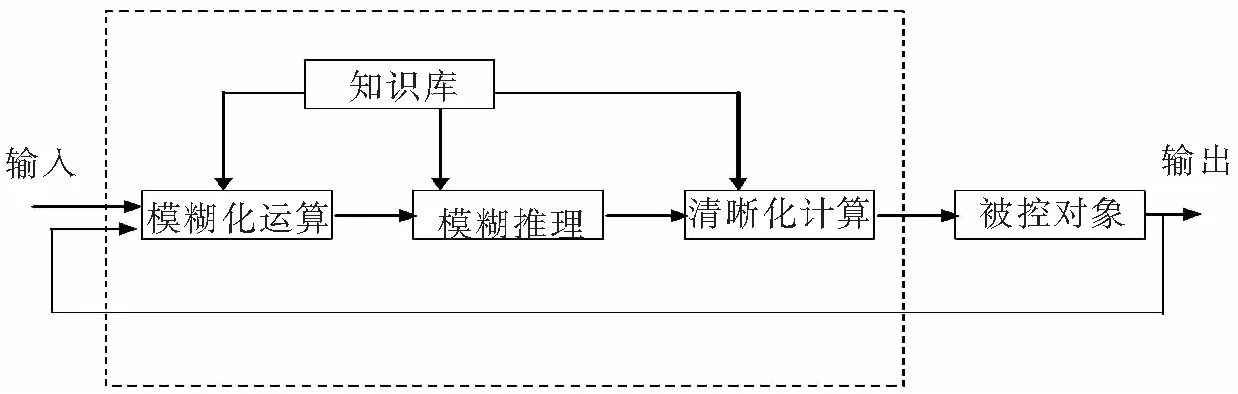
图1 模糊控制系统结构简图
2 基于发动机效率的模糊控制系统建模
混合动力汽车的模糊控制策略的出发点是以发动机的最佳转矩为基准,通过对发动机输出转速和转矩的控制,以实现蓄电池的充电和放电的平衡,使发动机的工作效率达到最大化,降低油耗,减少排放。模糊控制的输出为目标需求转矩和发动机最优转矩的差值ΔT和蓄电池的荷电状态SOC,输出参数为比例系数K。根据发动机的万有特性曲线,找出最小比油耗点,从而确定发动机最优的转矩曲线[2],同时考虑到当前电池的荷电状态SOC,从这两方面考虑来适当的调整发动机的输出扭矩,控制策略框图如图2所示。
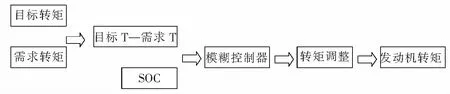
图2 模糊控制策略框图
图2中,控制策略框图中的输入有2个,分别为发动机目标转矩和发动机需求转矩,输出为发动机转矩,整个控制策略的核心为模糊控制器[3-4]。在MATLAB/Simulink将图2编写为图3所示。

图3 Simulink下的程序框图
模糊控制规则是整个模糊控制策略的核心,它建立在对被控对象特性的理解和对控制的经验基础上[5]。模糊控制规则的设计需要合理分配输入和输出的模糊值,输入量的论域上分配的模糊值越多,控制规则的细化程度也就越高,系统的精确度也就越高,得到的输结果的精确度也就越高。但是模糊规则的数目不宜太多,否则系统运算的工作量就会过大,不利于运算速度[6]。本模糊控制器的输入量为2个,一个为道路的请求需求转矩和发动机最优转矩的差值ΔT,一个为电池的荷电状态SOC,输出量为调整转矩因子K。所以控制规则表1所示。表1中第一行代表差值ΔT的论域范围,第一列代表电池SOC的论域范围,表1中的数值是在输入量ΔT和SOC的论域范围下的调整转矩因子K的取值。
转化为模糊控制语言为:
IfΔTisNBandSOCisNBthenKisK12(K12=1.15)
If ΔTisNBandSOCisNSthenKisK9(K9=1.05)
IfΔTisPBandSOCisPBthenKisK8(K8=1.0)
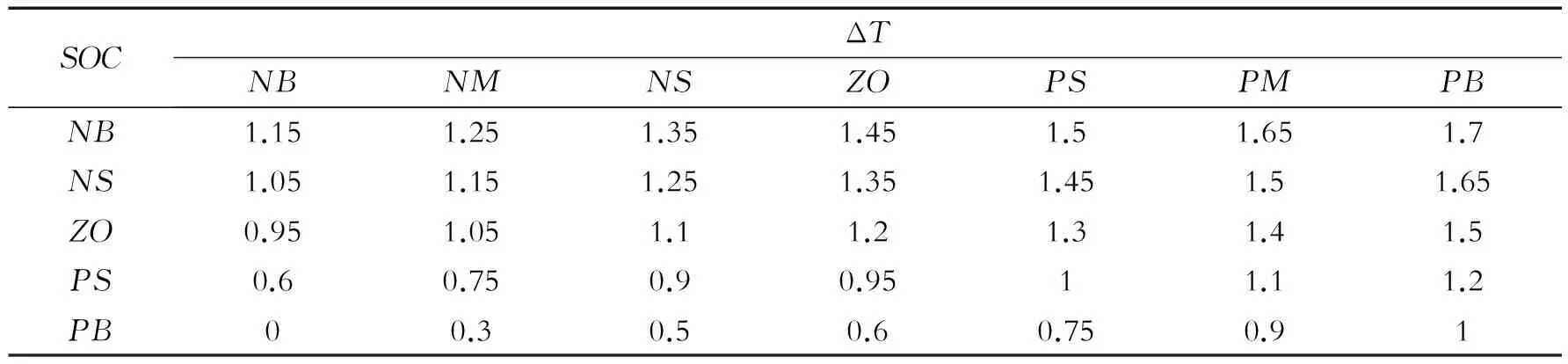
表1 模糊控制规则表
为了更直观地观察该系统的输入与输出的关系,可以利用控制曲面观察器,如图4。
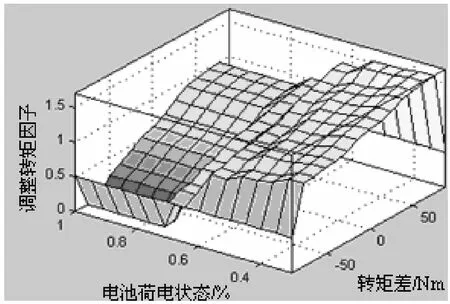
图4 模糊控制曲面
3 仿真结果分析
将模糊控制系统嵌入到ADVISOR软件中,在UDDS(Urban Dynamometer Driving Schedule)下进行仿真分析,UDDS代表城市动态驱动工况,它主要应用于城市工况对轻型车辆的检测,工况路段较为平稳。如图5所示。

图5 总循环工况
3.1电池SOC曲线
驱动电机是靠电池提供能量来工作,所以蓄电池的SOC间接的反应了驱动电机的工作状态。2种控制策略在UDDS工况下的电池SOC曲线对比如图6所示。图6(a)为电机辅助控制策略,图6(b)为基于发动机效率的模糊控制策略。
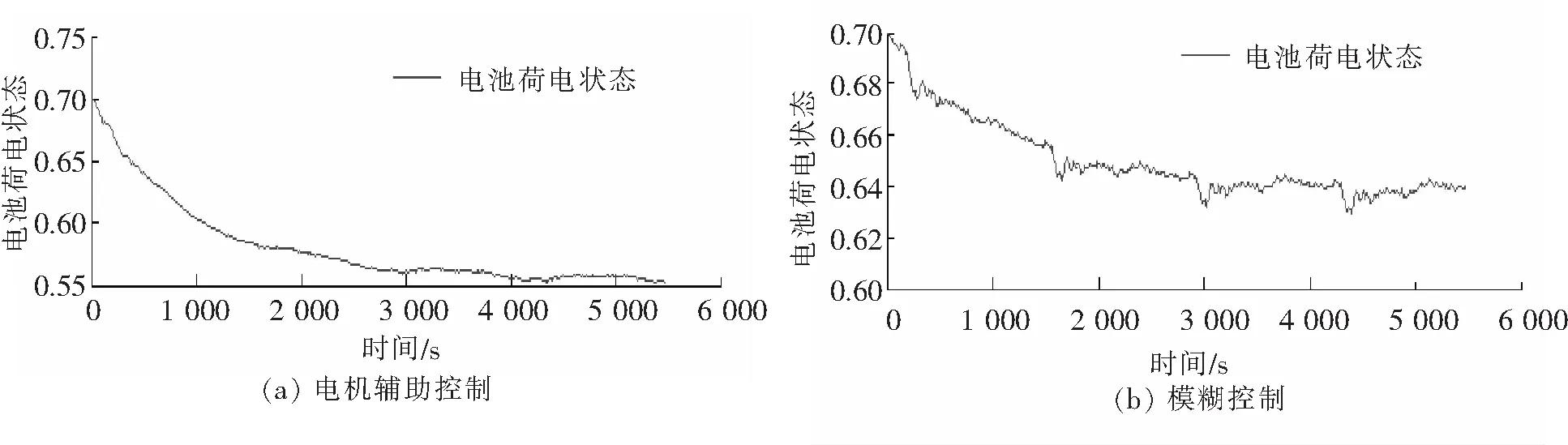
图6 2种控制策略的SOC曲线
由此可以看出,它们的SOC曲线在车里行驶一段时间后,均在0.5~0.65范围内,满足蓄电池的充电和放电的平衡。模糊控制策略要求发动机工作转矩在其最佳转矩的曲线周围波动,在3 000 s时,发动机的转矩已经接近最佳转矩,蓄电池只需根据工况的需求放电或者充电来使电机有足够的转矩来辅助发动机在最佳转矩的范围即可。此时,SOC曲线趋于平稳,基本维持在0.64左右,只在车速需求较大的一小段时间产生了较小的波动。
3.2发动机工作转矩分布
图7为2种控制策略的发动机工作转矩分布图。图7(a)为电机辅助控制策略,图7(b)为模糊控制策略。

图7 2种控制策略的发动机转矩工作分布图
此工况下发动机在电机辅助控制策略和动态转矩协调控制策略工作状态基本一致,它们的工作状态下的转矩分布图也大体相似,在此工况要求下的车辆请求速度高,所以发动机在不影响蓄电池的充电放电平衡的条件下,提供的转矩基本可以满足车辆行驶的需要。叉表示发动机扭矩的工作点。由图7(a)中可以看出,发动机的工作点有的已经高于转矩的最大扭矩曲线,这时发动机提供的驱动转矩较高,电机没有得到充分的利用,而也有部分工作点在最小转矩范围之下,在此情况下电机可以来代替发动机提供驱动转矩,避免发动机在最低效率范围内提供运行。图7(b)中,发动机的工作点没有高于发动机的最大转矩曲线,也没有低于发动机的最小转矩曲线,它基本分布在发动机的最佳转矩曲线(虚线)附近。
3.3发动机工作效率
2种控制策略的发动机效率如图8。其中图8(a)分别为电机辅助控制策略,图8(b)为模糊控制策略。

图8 2种控制策略的发动机效率分布
叉表示发动机工作效率点,图8(a)中显示,在0 ~ 1 000 s内的运行过程中,车辆刚刚进入运行工况,其请求车速由高变低,到1 000 s时车速区域平稳,此时发动机效率点部分分布在0.05~0.2之间,UDDS工况下停车次数较多,尤其是在车辆起步阶段,发动机的效率点有一部分在0.02之下,说明低速时发动机燃油消耗所提供的能量作用在驱动汽车行驶的部分较少,一部分能量变成热量随着尾气排出,这就导致了发动机的效率降低,油耗增加,废气排放量升高。而在图8(b)中,发动机工作效率点大部分集中在0.25~0.35之间,效率点集中,低速时的效率点分布较少,说明发动机燃油消耗所提供了能量大部分作用在于驱动汽车行驶,变成热量排出的较少,效率较高。
3.4经济性和排放
除了车辆的动力性能之外,经济性和排放也是两个相当主要的部分,它体现了车辆是否可以满足当今人们的消费水平,顺应当代的社会环保状况,我们不仅需要效率高的控制策略,同时也要注重废气的排放。表2反应了2种控制策略下经济性和汽车尾气的排放情况。

表2 2种控制策略的排放对比
4 结论
在UDDS工况下,由于路面平稳,请求车速低,电机辅助控制策略与模糊控制策略相比,电机辅助控制策略的动力较强,蓄电池SOC较低,说明电机提供了额外转矩,但是发动机并没有在其最佳转矩范围,所以导致发动机效率不高,百千米油耗为8.9 L,高于模糊控制的7.8 L,所以模糊控制的经济性比较好,而在排放反面,碳氢化合物的排放基本相似,一氧化碳的排放模糊控制远低于前2种控制策略,氮氧化合物的排放模糊控制较高,而在车辆高负荷运行的条件下才会导致氮氧化合物升高,由于模糊控制下电机必须配合发动机的最佳转矩曲线,所以发动机的驱动扭矩较高,所以氮氢化合物的排放略高。总体来看,在UDDS工况下,无论是经济性还是排放,模糊控制策略都优于电机辅助控制策略和动态转矩协调控制策略。
[1]李国勇. 智能控制及其MATLAB实现[M].北京:电子工业出版社,2005:194.
[2] 吴丹峰,谢冰,邓文娟. PHEV模糊逻辑驱动控制策略模块开发[J].重庆工学院学报:自然科学版,2008,22(4):8-9.
[3] 王保华.混合动力城市客车控制策略与试验研究[D].上海,上海交通大学机械与动力工程学院,2008.
[4] 石庆升.纯电动汽车能量管理关键技术问题的研究[D].山东,山东大学控制科学与工程学院,2009.
[5] 刘金琨. 先进PID控制MATLAB仿真[M].2版.北京:电子工业出版社,2004:104-105.
[6] 徐小东,张冰战.基于模糊逻辑的混合动力汽车控制策略研究[J].合肥工业大学学报:自然科学版:2012,35(6):725-727.
Research on Energy Control Strategy of Parallel Hybrid Electric Vehicle Based on Fuzzy Control
Ma Liang1,Feng Guosheng1,Niu Xiaoyan1,Hu Zhiqing2
(1.School of Mechanical Engineering,Shijiazhuang Tiedao University, Shijiazhuang 050043, China;2.Hebei Changlu Bus factory, Shijiazhuang 050200, China)
The basic theory of fuzzy control is expounded in this paper, the state of charge (SOC) of the battery in a parallel hybrid electric vehicle and the engine torque are used as the control target. The fuzzy controller is established, and then is embed in the ADVISOR software for simulation analysis. The simulation results from the fuzzy control strategy is compared with the results from auxiliary motor control, and the merits of the fuzzy control strategy is analysed
hybrid electric vehicle;energy control strategy;fuzzy control;SOC;ADVISOR
2015-05-22责任编辑:刘宪福DOI:10.13319/j.cnki.sjztddxxbzrb.2016.03.14
河北省自然科学基金(E2014210050);石家庄市科研计划项目(141081011A);河北省引进留学人员资助项目(C2015005019)
马良(1987-),男,硕士研究生,主要从事新能源汽车研究。E-mail:532618528@qq.com
U469.72
A
2095-0373(2016)03-0076-05
马良,冯国胜,牛晓燕,等.基于模糊控制的并联混合动力汽车能量控制策略研究[J].石家庄铁道大学学报:自然科学版,2016,29(3):76-80.
