MCGS与PLC在锅炉夹套温度串级PID控制系统的应用
2016-10-24北方民族大学电气与信息学院牛小燕
北方民族大学电气与信息学院 孙 浩 尚 燕 牛小燕
MCGS与PLC在锅炉夹套温度串级PID控制系统的应用
北方民族大学电气与信息学院孙浩尚燕牛小燕
通过对传统锅炉温度串级PID控制系统的分析,得出其自动化程度不高并存在纯滞后特性,因此很难满足现在复杂的工业控制。本文基于PC机为上位机,S7-200PLC为控制器,电磁阀SCR为被控对象的控制系统研究。通过Smith补偿消除了时滞对系统的影响,同时MCGS的画面更加方便操作人员的监控。
MCGS;PID;S7-200PLC;串级控制;Smith补偿
随着生产的发展和生产工艺的增加,传统的工业控制系统已不能满足现在控制系统要求。由于串级控制系统能迅速克服进入副回路扰动的影响,增强系统的动态性能,因此采用串级控制。PC机和MCGS组合为上位机,S7-200PLC为控制器,同时对主副回路控制均采用Smith-PID控制器的策略。
1 锅炉夹套串级控制的设计原理
夹套温度作为主控制对象,在控制系统中起到主要的控制,而炉胆内的温度作为副控制对象起辅助的控制作用。当扰动加入副回路中,此时副控制器是一个定值控制。副回路对检测到的扰动首先进行粗调,减少进入主控制回路的扰动。
2 锅炉夹套串级控制的硬件设计
2.1锅炉夹套串级控制系统
控制系统的结构如图1所示:
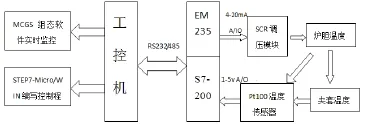
图1 控制系统的结构
2.2硬件的功能介绍
(1)S7-200PLC 通过EM235实现传感器与PLC的数据通信,对采集的数据进行处理并传送给个执行机构如SCR。同时S7-200PLC还和上位机实现通讯,如程序的下载,MCGS和PLC各参数的数据交换,实现了在线监控的目的。
(2)EM235模拟量模块4路输入和1路模输出。主要是完成模拟量和数字量的转换。设置EM235模拟量输入为0-5 V电压输入,模拟量输出为4-20 mA。
(3)SCR 系统的执行器,PID整定的参数传送给SCR,来实现控制器温度的升降。
(4)上位机 PC机和MCGS组态软件。
(5)温度传感器,这里选择Pt100 铂电阻。
(6)变送器 将电阻信号转换成4-20mA。
3 Smith预估器的PID实现
3.1Smith预估器
由于锅炉存在较大的滞后特性,破坏系统的动态性能,出现超调和振荡现象。Smith预估器是一个对时滞进行补偿的控制器,使被延迟的被调量,超前反映到调节器,使调节器提前动作,来抵消时滞所造成的影响PID参数整定。设被控对象的传递函数,为Smith预估器的传递函数,理想的闭环控制是将纯滞后环节放到闭环控制系统外,由于系统的滞后现象无法消除,故两者闭环传递函数是相同的,即:

求得从而求得Smith预估器的传递函数:

闭环系统的传递函数为:

由式可知闭环控制回路中不存在纯滞后环节与未加Smith预估器的控制特性是完全一样的。通过加入Smith预估器,可以消除纯滞后部分对系统的影响,从而达到更精确的控制效果。
3.2PID参数整定理论
PID控制器是按照比例、积分、微分规律进行控制的,是现在最为广泛应用的控制器。PID算法的实现是将系统传递函数,化成和有关的公式即:



3.3PLC中PID的实现
每个控制回路的PID都有两个输入给定值,反馈值。由于数据类型的不同,因此在进行PID运算及输出要进行数据的标准化处理, PID回路控制程序如图2所示。

图2 PID回路控制程序
3.4串级PID参数整定
参数的整定,就是通过控制器参数的整定,找到最佳的控制参数,以达到最好的控制品质。本课题采用逐步逼近法。逐步逼近法就是断开主回路,把求得副控制回路的参数加入控制系统中,同时主回路闭合,并求得主控制器的参数。在保持该主控制参数时进行第二次的副控制器参数整定,直到能够满足控制系统的品质要求为止。
3.5PLC程序流程图
PLC程序流程图如图3所示,主程序主要是程序的初始化、中断允许。中断完成参数的整定,控制外设工作。
4 MCGS监控组态
由于MCGS具有简单易学、操作简单、可视化窗口显示的特点,
因此根据系统的控制要求,通过MCGS的组建得到锅炉夹套串级PID控制的监控画面如图,MCGS和PLC通过PC/PPI通信协议进行数据的交换,在MCGS设备窗口添加串口父设备,从而实现对各控制参数的监控。MCGS设计的系统主画面如图4所示,输出曲线。
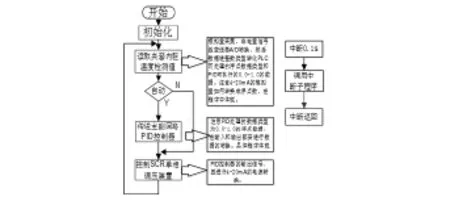
图3 PLC程序流程图

图4 MCGS系统整体设计图
5 结论
本文通过对串级控制系统、Smith预估器、PID算法原理介绍及PLC内置PID算法的程序的实现。通过实验表明具有Smith-PID控制器的控制系统比传统的PID控制能更好的解决时滞问题,其动态性能好,超调量不大。通过MCGS组态软件的实时在线监控,方便操作人员的监控,提高工作效率。
[1]赖寿宏.微型计算机控制技术[M].北京:机械工业出版社,2009.
[2]胡寿松.自动控制原理[M].北京:科学出版社2007.
[3]魏万迎,罗爱民.基于PLC内置PID软件的Smith补偿方法[J].控制工程,2009,9(16):11-16.
[4]从闯.基于Smith预估补偿的模糊-PID混合控制在时滞系统中的应用研究[D].东北大学:2008(1):33-37.
