基于仿射不变几何特征的机械臂标志器识别
2016-10-21董继红
董继红


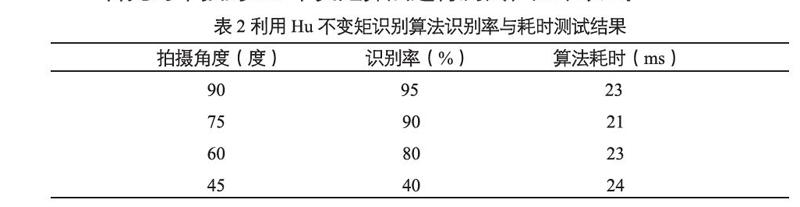
摘 要:对机械臂标志器的准确识别是对机器人不同机械臂部位位置与姿态准确测量的前提。本文针对在利用机器视觉进行标志器识别的过程中,机械臂运动造成获取的图像存在较大仿射变换,从而降低识别准确率的问题,提出利用仿射不变几何形状特征来进行机械臂标志器识别。本文基于已有的几何形状特征,结合标志器实际的几何形状,通过归一化手段确定了六个仿射不变几何形状特征以及两个用于辅助识别以提高识别准确的特征判别因子,在此基础上,建立了标志器目标特征向量库,用于通过模式识别的手段对标志器进行识别。最后,搭建实验装置,在不同拍摄角度下,利用采集的图像对标志器进行识别,并与常规的利用HU不变矩的方法进行对比,结果表明,基于仿射不变几何特征对机械臂标志器进行识别的方法,能在保证实时性的情况下,有效降低因拍摄角度不同对识别准确率造成的影响,从而提高识别准确率。
关键词:机械臂标志器;仿射不变几何特征;特征向量;模式识别
随着航天技术的不断发展进步与人类对太空探索活动的不断深入,未来空间机器人将扮演越来越关键的角色。然而,空间机器人相对于地面固定基座的机器人运动学特性较复杂,增加了空间机器人控制难度。所以空间机器人控制过程的地面仿真验证变得非常重要。基于气浮的空间微重力模拟系统为空间机器人控制的地面仿真验证提供了一种方便有效的实验手段。然而,针对大型气浮式实验平台,如何在实时的条件下对机器人不同机械臂进行识别以及位置姿态的精确测量,便成了制约实验平台应用于空间机器人控制地面仿真的关键问题。目前,常用的移动机器人定位技术,难以在实时条件下对机器人的不同部件进行识别与位置姿态的测量。
计算机视觉为类似空间机器人基座与空间机械臂等多刚体航天器不同运动机构的识别以及位姿确定提供了准确有效的解决方式。可将具有显著形状差异的目标识别器贴附于空间机器人基座与不同机械臂部位,这样便可以通过对目标识别器的识别达到对运动机构构型进行识别的目的,在此基础上再对运动机构进行精确定位。对机械臂标志器的准确识别是对机器人基座与不同机械臂部位位置与姿态准确测量的前提。然而,机械臂在视野中相对位置的变化会导致图像中实际的目标识别器形状与原始形状之间存在较大的仿射变换,从而严重影响常规基于几何形状特征识别算法的准确性。针对该问题,本无提出基于仿射不变几何特征的机械臂标志器识别算法,不但有效提高了识别准确率,并且能够保证识别的实时性,对于空间机器人控制过程的地面仿真验证具有重要意义。
1 仿射不变形状特征
1.1 几何形状特征
图像特征是图像中存在的一种抽象的特有的可用于标识的固有属性,几何形状特征便是其中一种常用的图像特征。形状特征的分析是在将图像分割为不同区域的基础上,通过区域的几何形状特性来对其进行描述。除了基本的几何参数,如周长、面积、重心位置等,还包括复杂度、形状系数、最小外接矩形长宽比、方位角,球状性,圆形度以及似圆度等,下面对几种几何特征进行介绍。
复杂度C:
(1)
其中L为区域周长,S为区域面积。
形状系数K反映区域的狭长程度,
(2)
方位角表示目标区域最小外接矩形长轴与横轴的夹角。还有三个描述区域紧凑性的几何形状参数,球状性,圆形度和似圆度等。
球狀性SP:
(3)
和分别为区域重心到边界的最短和最长距离。
圆形性CI是一个用目标区域中所有边界点定义的特征量,
(4)
其中为区域重心到边界点的平均距离,为重心到边界距离的标准差:
(5)
(6)
另外,似圆度也可以描述形状的紧凑性或者狭长性,
(7)
其中,为区域横轴长度。
1.2 仿射不变几何形状特征
空间机器人实验模拟系统,本文主要针对空间机械臂运动机构的四个标志器进行识别算法研究,标志器如图1所示。
在对机械臂不同部位处标志器进行具体的定义之后,便可以对这些几何形状的特征进行深入挖掘,定义仿射不变几何特征。
通过归一化构造仿射不变几何特征。虽然仿射变换会改变几何形状特征的具体值,但并不改变四个标志器某些特征的排列顺序。这些特征中比较典型的有面积,复杂度、形状系数,圆形度,球状性以及似圆度等。
这样便得到归一化面积、归一化复杂度、归一化形状系数、归一化圆形性、归一化球状性归一化似圆度等6个比较典型的仿射不变形状特征。
图1 机械臂不同机构四个标志器
定义特征判别因子,在通过归一化构造仿射几何不变特征的基础上,还可以定义对识别起到关键作用两个特征判别因子,一是方位角,二是形状质心与外接圆的重合性。
方位角为圆形标志器的特征判别因子:
(8)
形状质心与外接圆的重合性为三角形标志器的特征判别因子:
(9)
这两个特征判别因子,即方位角和形状质心与外接圆中心重合与否,可在归一化几何形状特征接近时起到关键判别作用,有效提高识别准确率。
1.3 特征库建立
在具体机械臂标志器识别之前,需要首先建立各机械臂标志器的特征向量库,在实际识别过程中,基于该向量库以及与各标志器仿射不变几何特征构成的特征向量,利用欧式距离进行判别。由于随着拍摄角度不同那个,各个仿射不变特征的值也在改变,只是排列顺序保持不变,为了得到随拍摄角度不变的特征向量库,可以按照排列顺序,将各个特征向量的值离散化,由于本文针对4个标志器进行识别,那么可以将各个仿射不变特征归一化之后,按照排列顺序,用1-4这4个整数代替。结果入下表:
表1 离散化的仿射不变特征量
