BTZ-3100型探针台承片台系统的改进研究
2016-10-18郑金宝
郑金宝
(秦皇岛视听机械研究所,河北秦皇岛066000)
BTZ-3100型探针台承片台系统的改进研究
郑金宝
(秦皇岛视听机械研究所,河北秦皇岛066000)
BTZ-3100型自动探针台是半导体芯片测试的高精密仪器,其中运动系统是该分选设备的一个重要结构。结合客户在使用过程的反馈意见,总结了运动系统存在的一些问题:主要包括z轴升降台运动导致的芯片划伤,以及u轴旋转轴的旋转精度不够。针对这两个问题,主要更改了z轴升降台的软件控制方式,同时改进了u轴的机械结构,优化了机械运动和软件控制的配合方式,并且对改进后的结构进行了实际测试,测试结果显示探针台运动系统的精确性和稳定性得到了提高,设备运行过程中出现的划伤问题和对齐精度不高的问题都得到了很好的解决。
承片台系统;z轴升降台;u轴
半导体芯片封装、测试是半导体制造过程的一个重要环节。随着半导体芯片制造业的迅速发展,芯片测试越来越受到生产厂家的重视,并且已经成为半导体生产行业中一个不可或缺的重要环节,所以相关测试设备的设计和制造也得到了迅速发展[1]。BTZ-3100型自动探针台是秦皇岛视听机械研究所专为半导体生产厂设计的用于半导体芯片封装前晶圆测试的生产设备。与相应的测试仪进行信号通讯就可以组成一套完整的测试系统。BTZ-3100型自动探针台采用整体箱式结构,封闭式设计,其主体主要分为四大部分:电气控制系统,机械运动系统,操作系统,显示系统。该设备是高速、高精度、高压型探针机型,主要适用于半导体分立元件,光电元件的高压测试。
探针台承片台系统是芯片测试过程中比较重要的一个部分。承片台系统的载片平台的平面度以及z轴升降台的升降和u轴的旋转精度,都影响着整个测试设备的测试精度和测试结果的准确性,所以,针对承片台系统现存的测试划伤和u轴旋转轴精度低的问题进行了研究改进,来提高整个设备的测试精度和稳定性。
1 承片台系统结构和工作原理
BTZ-3100型自动探针台承片台系统的两个重要运动过程包括z轴升降台方向的升降和u轴水平面的角度旋转。其中z轴升降台的升降主要是通过承片台安装的滚轴丝杠结构,用伺服电机连接同步带来带动滚珠丝杠完成承片台的上下运动。z轴升降台的升降主要是实现测试芯片与探针的接触和分离,进而完成对芯片的逐个连续测试,其升降运动达到的行程为4 mm,在整个测试的过程中,z向的升降要求每次芯片与测试探针接触而且不要出现大的划痕。而u轴水平面的角度调整是通过步进电机连接同步带带动载片台结构旋转完成的,其旋转的角度范围可以达到± 15°,u轴的旋转作用是完成测试前对芯片的水平对齐,使得测试过程中测试针与芯粒不会发生水平上的偏移。
在探针台对芯片的测试过程中,通过运动控制卡加载的程序,工控机发出信号给电机驱动器控制电机转动,z轴升降台在伺服电机的带动下上升,使z轴升降台吸盘上的测试芯片与探针接触,测试仪完成对芯片参数的测试,测试完成工控机接收到测试仪的测试结束信号,工控机发出信号使伺服电机控制z轴升降台下降。同时软件控制X-Y运动平台定位到下一粒芯片的位置,重复上升,测试,下降,完成对所有芯片的测试[2]。承片台系统的结构如图1所示。
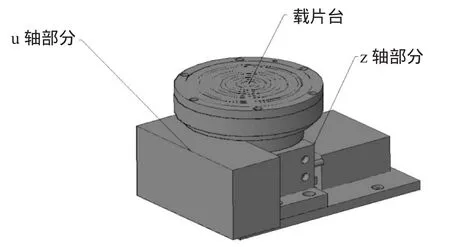
图1 探针台承片台系统
2 结构改进
2.1升降台运动控制方式改进
BTZ-3100型自动探针台的承片台系统基本上可以满足测试过程,但是z轴升降台的升降是一个开环控制,没有对接触结果的反馈信号,每次z轴升降台升降的电机旋转脉冲是一定的,那么在测试的过程中,载片台和测试芯片的平整度以及z轴升降台电机和丝杠的传动精度都会使z轴升降台上升或下降的高度发生变化,导致出现测试探针和测试芯片的接触不好或出现上升过高而划片的结果[3]。
现在设备的z轴升降台的运动与控制系统之间是开环控制,控制z轴升降台的伺服电机只是接受一次控制信号,z轴升降台的升降高度不会反馈给控制系统。所以要想控制z轴升降台的实际升降高度,需要将以前的开环控制改为闭环控制。载片台的升降主要是完成探针与测试芯片的接触测试和分离,所以可将探高器的开合作为z轴升降台升降的反馈信号,探针与测试芯片接触开始测试,同时探高器被打开,z轴升降台接受反馈信号开始下降,这时探高器闭合,z轴升降台下降一定高度后再次上升,这样则完成了z轴升降台升降高度的可控性,实现了闭环系统控制,解决了测试探针和测试芯片的接触不好或出现上升过高而划片的问题。如图2所示[5]。
除了将z轴升降台的开环控制系统改成闭环控制系统,同时还优化了z轴升降台电机的运动方式,将z轴升降台的一次上升过程变成分段运动,分为基本高度、接触高度、缓冲高度。在将要与芯片接触的末段运动变成减速运动,增加了一个减速缓冲的过程,避免了芯片与探针的硬性接触,减少了探针对芯片的划伤。图3(a)为改进后,(b)为改进前两种运动方式对芯片的划伤对比图。
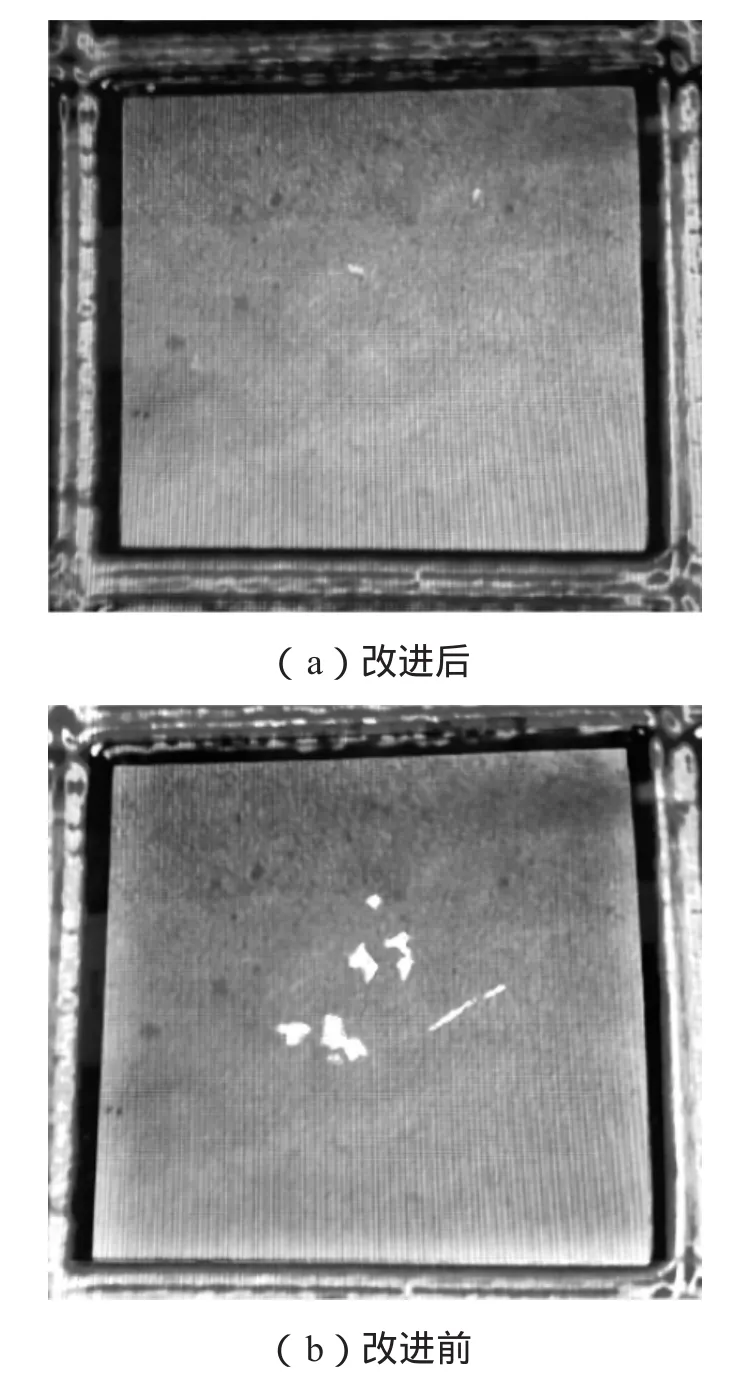
图3 z轴升降台改进后的划痕图
图3中的(a)图为z轴升降台改进后所测芯片的针痕图,(b)图为z轴升降台改进前所测芯片的针痕图,通过两个图片的对比可以看出,(a)图虽然也有针痕,但是接触针痕比较小,其针痕大小所占芯片的整体面积比例完全符合测试客户的要求,(b)图的针痕比较大,其针痕大小所占芯片的整体面积比例已经超出客户要求,已经造成了对芯片表面的损伤,并且还会出现比较长的划痕,这种划痕是因为z轴升降台上升过程为开环控制,导致了探针与芯片的过度接触,出现了比较长的划伤,通过图3可以看出z轴升降台的改进解决了测试探针和测试芯片的接触不好和出现上升过高而划片的问题。
2.2u轴旋转轴的结构改进
在测试前的扫描对齐过程中,u轴的旋转会出现传动件间的空程现象,主要是因为在步进电机带动同步带转动的过程中,由于同步带和齿轮间的摩擦力不够,导致步进电机的转动没有带动同步带运动,尤其是在u轴的往返运动中更为明显。这样就会导致在扫描对齐的过程中,对齐时间过长或者测试芯片达不到对齐的位置,致使在接下来的测试过程中出现测试针偏离芯片的现象。
于是对u轴的结构进行了改进,主要改进部分是在步进电机与载片台之间的传动结构上,考虑到传动带与锯齿间的摩擦大小不同,会影响到传动精度的实现,所以将步进电机与载片台之间的同步带传动,换成通过铜片连接轨道滑块与载片台,然后通过步进电机带动螺杆旋转使滑块牵引载片台旋转。机械结构如图4所示。
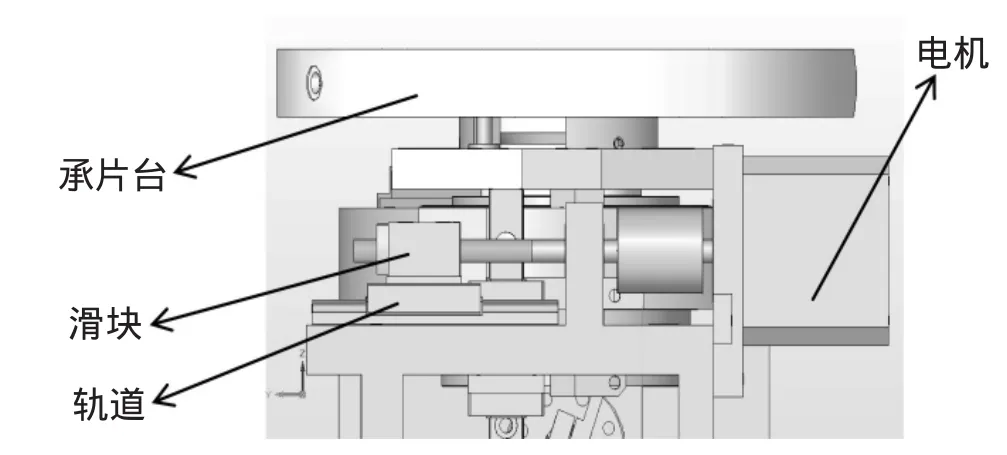
图4 u轴改进示意图
这样载片台的旋转精度主要由步进电机的旋转精度和螺杆的规格决定,进而消除了之前同步带传动的空程滑动问题。原u轴旋转角度公式如式(1),改进后u轴旋转角度的公式如式(2)。

公式(1)中,θ2为载片台的旋转角度;r2为载片台的旋转半径;θ1为电机端的旋转角度;r1为电机端的旋转半径。

公式(2)中,θ为u轴旋转角度;l为滑块的行程;r为承片台的旋转半径。

公式(3)中,θ为u轴旋转角度;ΔL为实际旋转误差距离;R为晶圆的实际半径。
由(2)、(3)可以得出:

由公式(1)可以看出,通过同步带传动的u轴旋转精度主要受同步带的传动精度影响,如果出现空程现象,则u轴的旋转角度会受到比较大的影响。由公式(4)得出改进后的u轴的旋转角度主要靠滑块在螺杆上的滑动行程,则不会出现比较大的空程现象,确保了u轴每次的旋转精度。将改进后的结构通过软件自动扫描对齐,将对齐后的旋转对准精度用万能工具显微镜进行测量,得出的旋转误差统计值如图5。
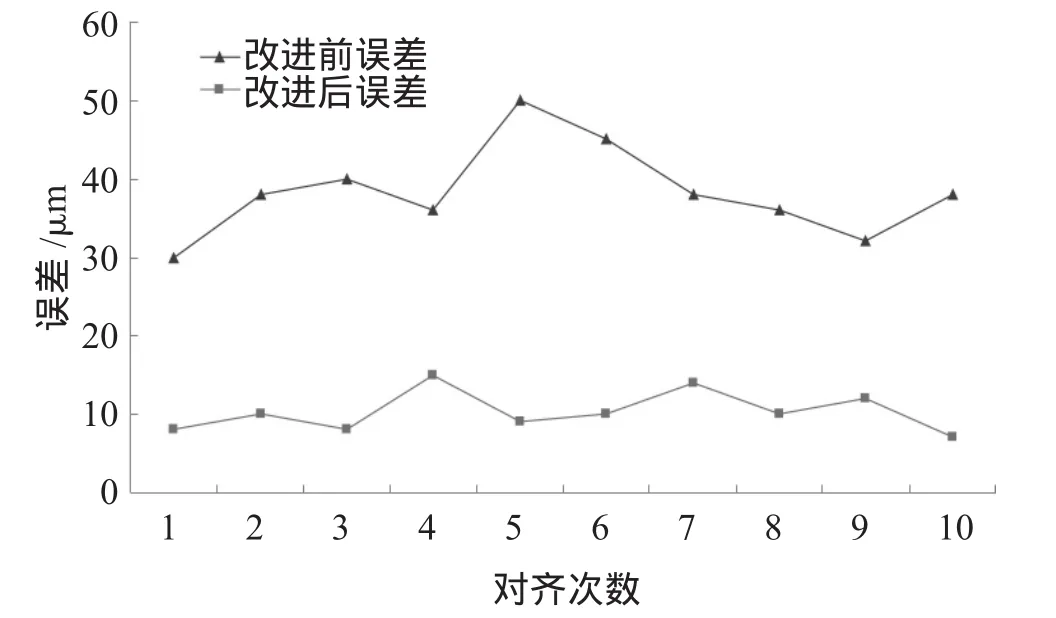
图5 改进前后u轴旋转误差统计表
通过图5可以看出,改进前的旋转精度比较差,通过万能工具显微镜测得的平均自动对齐误差为38 μm,在测试过程就会出现测试针偏离芯片中心的现象,影响测试结果的准确性。但是改进后通过万能工具显微镜测量得出的平均旋转误差为10 μm,所以u轴改进后的效果提高了整个机器的自动对齐精度,使整个测试结果的稳定性得到了提高。
3 结 论
对于BTZ-3100型自动探针台结构的改进和设计主要参考了国内和国外相似机型的结构,并且结合了我所研发设备的自有特点,在原有结构的基础上,将z轴升降台的软件控制模式进行了优化改进,将之前简单的开环控制模式改为闭环控制模式,降低了升降台承载芯片与探针的硬性接触,减少了芯片的划伤;并且对u轴的传动结构进行了改进,并对改进前后的运行情况进行了旋转精度实验对比,对比结果证明此次改进提高了u轴旋转轴的精度,使得承片台系统的整体测试精度和测试稳定性得到了提高,存在的问题得到了很好的解决。
[1] 杨超,胡泓.面向IC测试技术的精密运动平台的设计[J].机械工程师,2006,(5):52-54.
[2] 于林丽,濮钰麒,孟丽霞,等.精密扫描平台控制电路的设计[J].仪器仪表学报,2006,27(Z1):617-618.
[3] 吴小燕,柏正香,欧昌银.多探针自动测试台的技术改造[J].微电子学,2006,36(6):842-844.
The Improvement of Motion System to the BTZ-3100 Probe Station
ZHENG Jinbao
(Qinhuangdao Audio-Visual Machinery Research Institute,Qinhuangdao 066000,China)
The BTZ-3100 automatic probe station is the high precision instruments of semiconductor chip testing,and the motion system is an important structure of the sorting equipment.To improve the accuracy and stability of the motion system,the article summarizes some problems of the motion system and puts forward the improvement method in combination with the feedback message of the customers in the use of equipment,mainly includes the chip scratches caused by the z axis movement,and the less high alignment accuracy caused by insufficient rotation accuracy of u axis.To solve these problems,the way of the software control of z axis is changed,,at the same time the mechanical structure of u axis is improved,all the methods can optimize the way of the cooperation of mechanical movement and the software control,the improved structure has carried on the actual test,the test results show that the accuracy and stability of the probe's motion system are improved,the problems of scratch and false-positive in the process of equipment operation are well solved.
Motion system;z axis;u axis
TN305
B
1004-4507(2016)09-0034-05
郑金宝(1987-),男,汉,河北省唐山市人,硕士研究生,机械工程师,主要从事精密仪器机械设计。
2016-07-25
