基于粒子滤波的目标跟踪抗野值算法
2016-10-18张昆陶建锋李一立
张昆,陶建锋,李一立
(空军工程大学防空反导学院,西安710051)
基于粒子滤波的目标跟踪抗野值算法
张昆,陶建锋,李一立
(空军工程大学防空反导学院,西安710051)
运用粒子滤波对目标位置进行跟踪时,测量数据的异常突变点、目标的机动转弯、粒子数量的制约和重要性密度函数的优劣都会导致估计误差较大的野值出现,这将严重影响雷达对目标的跟踪精度。现有的野值剔除方法在目标发生机动时,都存在误剔率较高的问题。针对这个问题,采用莱特准则与机动门限准则相结合的方法,提出了不确定观测点的概念,设计了一种适用于机动目标的抗野值粒子滤波算法。仿真结果表明,该方法能较好地检测和更新野值,降低跟踪误差,提高跟踪精度。
粒子滤波,机动目标跟踪,非线性滤波,野值剔除
0 引言
粒子滤波(Particle Filtering,PF)是一种非参数化的蒙特卡罗模拟方法,通过递推的贝叶斯滤波来逼近最优化估计,可以较好地解决非线性非高斯观测条件下的目标跟踪问题。采用粒子滤波对目标跟踪时,测量数据通常要受到外界复杂环境的干扰,并经过数字采集转化系统、传输系统等环节才能送到滤波器中,所得到的数据包含着1%~5%甚至10%~20%的严重偏离目标真实航迹的野值[1]。同时粒子滤波由于粒子数量的制约、重要函数的优劣和累积误差,也有可能出现估计不准的野值,这些野值都会导致目标跟踪出现跟不准现象。
本文结合粒子滤波,提出了一种适用于机动目标的抗野值粒子滤波算法。利用野值剔除准则和机动门限准则,实时判别目标运动过程中的野值,并及时补充新值,保证了滤波过程的递推进行。
1 粒子滤波算法原理
粒子滤波算法最先由文献[2]提出,核心思想是:首先依据系统状态向量的经验分布,在状态空间抽样产生随机样本集合,抽取的样本集合称为粒子。然后根据观测值不断调整粒子的权重和样本位置,通过调整粒子信息修正最初的经验条件分布,进而估计目标的状态和参数。假设动态系统的状态空间模型如下所示:

其中X(k)为系统的状态变量(向量);Z(k)为系统的量测向量;W(k)为系统噪声,V(k)为过程噪声,且分别为独立同分布的噪声序列;其中f(·)、h(·)分别为系统的非线性转移函数和测量函数。
对于非线性滤波问题,假定系统过程为M阶马尔科夫过程,系统的初始状态X0的先验条件概率为p(X0),目标是根据带有噪声的观测值,递归估计非线性系统的后验概率密度,其中X0:k={X0,X1,X2,…,Xk}表示到时刻K系统的状态序列,Z1:k={Z1,Z2,Z3,…,Zk}表示观测值序列。
粒子滤波通过构造一个基于样本的后验概率密度函数,利用N个粒子构成的集合表示后验概率密度,其中表示各样本粒子对应的权值。
根据带权粒子集合,时刻K的后验概率密度可以表示为

根据这一近似,可以将复杂的积分运算转化为求和运算。但直接从后验概率分布中抽取有效粒子非常困难,可以通过重要采样技术,选择粒子权值,来解决这一问题。如果以重要密度选择粒子,粒子的权值可以定义为:

对于马尔科夫过程,后验概率函数可以表示为:


归一化权值

k时刻状态估计为状态估计

上述就是基于序贯重要性采样(Sequential Importance Sampling,SIS)的粒子滤波过程,然而SIS存在一个很严重的缺陷,就是“权值退化”问题,即重要性权值的方差会随着时间而递增[3]。
本文采用残差重采样缓解退化现象,其思想是利用“残余粒子数”来修正原采样粒子集中,大权值粒子的复制次数,具体实现算法如下:
在标准的SIS算法中引入残差重采样步骤,这便形成了序贯重要重采样算法(Sequential Importance Resampling,SIR),也就是标准的粒子滤波算法(PF)的基本框架。
文献[4]给出了粒子滤波算法的详细步骤。每隔时间间隔T,粒子滤波模块被调用工作一次,它的输出是,其中既有用于目标跟踪的位置信息,也有反映目标机动参数的速度信息。
2 粒子滤波的野值剔除问题
上述讨论是基于理想条件的,实际目标跟踪系统测量得到的目标坐标,都要经过数字采集转化系统、传输系统等环节,才能把以数字形式表示的目标量测坐标,送到粒子滤波器中。信号中除了含有目标坐标外,同时含有干扰信号。当干扰信号在允许范围内,一般认为是随机误差,不会对粒子滤波造成大的影响,并且可以被剔除。然而当测量过程中的噪声超出了允许范围,将可能产生异常跳变点,使得测量值没有意义,此时的测量值就是野值。在粒子滤波中,重要性权值的方差会随时间的增大而增大,必然会产生算法退化现象,导致滤波器发散,出现估计不准甚至与真实位置相差较远的点[5]。这些点可能会对后续时刻目标跟踪差生严重影响,所以也归为野值点。因此,在对目标进行粒子滤波时,要对估计结果进行合理性检验,并剔除判定为野值的目标估计坐标。
2.1野值剔除分析
现有的野值判别和剔除方法有很多种,常见的准则的优缺点和适用范围如表1所示。
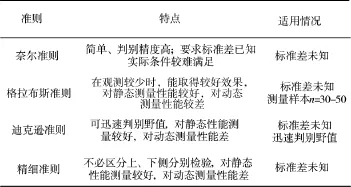
表1 常见野值剔除准则及特点和适用情况
最常用的也是最简单的野值判别准则是莱特准则,也称3σ准则。其基本思想是,对于某一观测序列,若测量值中只含有随机误差,那么根据正态分布规律可知,其残余误差落在±3σ以外的概率约为0.3%。当一次测量中发现大于±3σ的值,则认为是野值点,应剔除。
与粒子滤波结合的标准3σ准则在x轴判别公式为

但在目标跟踪中,由于目标的运动导致观测环境、观测距离发生变化,其测量误差的标准差可能发生变化。同时当目标机动,其状态估计可能会出现较大的偏差,那么在这一段统计的样本标准差也可能比较大,导致野值剔除不准确。而前述4种剔除准则都不适用于机动目标,为了有效剔除野值,又能减少误剔率,必须对现有准则进行改进。
2.2机动目标野值剔除方法
标准3σ准则在处理机动目标时,由于观测模型存在较大误差,容易将目标的机动估计值判断为野值点,造成跟踪精度下降。尤其是当目标做较强机动时,在机动起始阶段3σ准则很容易发生误判现象,这将严重影响粒子滤波对目标的跟踪。
针对这一问题,本文提出不确定观测点的概念,将观测点分为3类,即正常点、野值点和不确定点。所谓不确定点是指在目标跟踪中,当某个观测点由现有的判别准则判别为野值点,但同时此观测点又位于目标的最大机动范围之内,则记该观测点为不确定观测点,即不确定点。
算法的基本规则如下:
①输入k时刻,粒子滤波的估计值x~k,确定此时刻的3σ准则判别门限和目标的最大机动范围。
②比较3σ准则判别门限与最大机动门限的大小。
③3σ准则判别门限大,则根据3σ准则判别。
④机动门限大,则先用3σ准则判别,若满足,则为正常点,若不满足则进入下一步。
⑤当其超出机动范围,则为野值点;当未超出机动范围,则为不确定点。
具体算法流程图如图1所示:
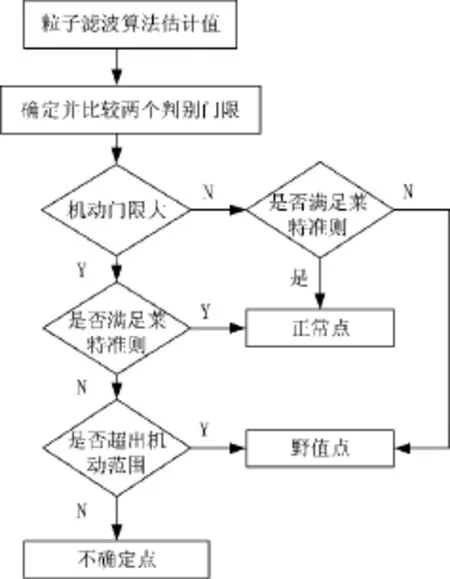
图1 机动目标野值剔除流程图
门限的确定如下:
①莱特准则门限确定
误差标准差是通过数据的统计求得的,根据随机误差正态分布理论,通过贝塞尔公式[6]可求得误差的标准差为:

其中,zxk表示k时刻x方向的观测值,x~k表示粒子滤波的估计值,则可得到x方向的判别门限为3σˆx,同样y为成立,既可判定该观测为野值。
②机动门限确定
当目标机动较小时,3σ准则可以很好地剔除野值;当目标做大动作机动时,3σ准则很有可能将机动估计值,误判为野值而剔除。为了对目标机动进行描述,定义机动系数:

Vk为时刻k的速度矢量,Vk-mT为m个时间间隔之前的速度矢量。当机动系数大于给定门限μ时,即S2(k,m)>μ,可判定目标在mT时间内做大机动转弯。机动系数与目标转角的关系为


给定门限μ和目标最大加速度amax,当机动系数大于μ时,且用3σ准则检验不合格时,判断目标是否位于约束范围内。若在,则认为是不确定点;反之则是野值。
正常点、野值点和不确定点的后续处理方法如下:
①正常点:采用此估计值,并进入下一时刻。
②野值点:剔除该值,为了保证滤波过程递推进行,采用上一时刻的估计值和下一时刻的观测值取平均,即

③不确定点:保留该值,进入k+1时刻的粒子滤波过程和野值剔除算法。因为目标的机动是连续的不可能突变,当k+1时刻的估计值为正常值时,则该不确定点为正常点;当k+1时刻估计值为野值点时,则该时刻为野值点。
2.3改进野值剔除的粒子滤波算法
综合以上分析,改进野值剔除的粒子滤波算法步骤如下:
①系统初始化。已知动态系统先验概率分布p(X0),并进行采样得到时刻k=0的初始粒子,每个粒子对应的权值为。

②系统粒子采样。根据式(1)进行k时刻粒子采样,得到粒子集合,并根据式(4)计算每个粒子权值。
④粒子重采样。根据残差重采样方法,更新粒子和权值。
⑥通过3σ准则和机动门限准则,判断估计值是否为野值。
⑦若是正常点,保留;若是野值点,剔除并通过式(17)更新估计值;若是不确定点,保留等待下一时刻判断。
⑧k=k+1,返回第②步。
3仿真分析
系统的状态状态方程为:

雷达在对目标观测时,主要采集目标的距离和角度信息,则观测方程可写为:,其中。
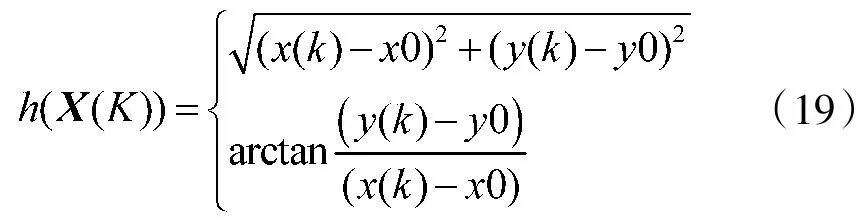
可见观测信息与状态信息之间是非线性的。
仿真时间T=30,间隔Δt=1,粒子数N=500,过程噪声为Q=diag(2,2),观测噪声为R=diag(10,π/180),取转角θ=45°即机动系数μ=0.585 8,目标初始位置为(3,0),雷达位置为(55,38)。在上述参数条件下,对目标轨迹进行跟踪,结果如下页图2所示。
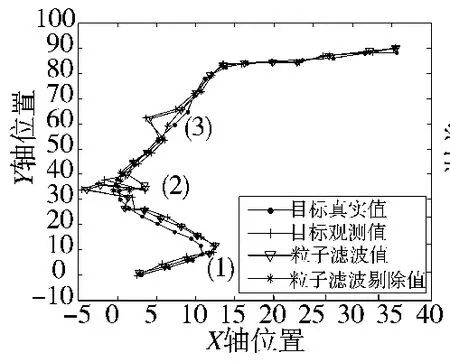
图2 目标轨迹图

图3 距离误差
从图2中可以看出,目标在(1)和(2)处做了两次大机动转弯,且在(1)处,观测轨迹与真实轨迹比较吻合,而在(2)处,观测值与真实值存在大的偏差。在位置(3)处,目标测量值与实际值也有比较大的偏差。
图3为各时刻测量轨迹、粒子滤波轨迹和改进轨迹与真实轨迹之间的距离误差。结合图2、图3,可以看出,在目标起始阶段和后面的小机动阶段,两种算法的处理结果相近,误差较小,都能很好地跟踪目标。在第2个机动转弯处,目标的量测值远离目标的真实值,通过粒子滤波的结果虽有改善,但无法精确地跟踪目标。同样在t=21时刻,量测误差较大,导致量测值与真实值存在较大偏差,滤波结果与真实目标位置相差较大。本文提出的机动野值剔除方法,能很好地检测出目标机动过程中,滤波结果偏差较大的点,并对其修正;同时对于平稳运动阶段由于强噪声造成估计不准的结果,也可以检测出来并修正,很好地减小了跟踪轨迹与真实轨迹的误差。
4 结论
在实际目标跟踪过程中,由于各种因素的影响,测量数据中不可避免地存在野值,同时粒子滤波由于粒子数量的制约、重要函数的优劣和累积误差,也有可能出现估计不准的野值。本文将野值剔除算法与粒子滤波相结合,并针对目标大机动运动情况,将观测点分为正常点、野值点和不确定点。改进算法可以准确地发现、剔除野值,并根据估计值和观测值进行更正。同时由于机动门限和不确定点的提出,本文的算法在处理目标大机动运动时,更具有可操作性,能较好地检测和剔除机动过程中的野值,仿真结果验证了该方法的有效性。
[1]祝转民,秋宏兴,李济生,等.动态测量数据野值的辨识和剔除[J].系统工程与电子技术,2004,26(2):147-149.
[2]GORDON N J,SALMOND D J,SMITH A FM.A novel approach to nonlinearand non-Gaussian Bayesian state estimation[J].IEEEProceeding,1993,140:107-113.
[3]DOUCETA,GODSILLS,ANDRIEUC.On sequentialmonte carlo sampling methods for Bayesian filtering[J].Statistics and Computing,2000,10(3):197-208.
[4]朱志宇.粒子滤波算法及其应用[M].北京:社会出版社,2010.
[5]ARULAMPALAM M S,MASKELL S,GORDON N,et al. Atutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J].IEEE Transactions on Signal Processing,2002,50(2):174-188.
[6]邓永和.中误差贝塞尔公式的推导[J].大地测量与地球动力学,2009,29(3):128-130.
[7]朱洁,张冰,刘炜.粒子滤波算法在单站无源定位中的应用[J].火力与指挥控制,2008,33(6):118-120.
[8]黄伟平,徐毓.一种抗野值的UPF算法[J].现代防御技术,2007,25(6):125-128.
[9]卢元磊,何佳洲,安瑾.目标预测中的野值剔除方法研究[J].计算机与数字工程,2013,41(5):722-725.
[10]张强,孙红胜,胡泽明.目标跟踪中野值的判别与剔除方法[J].太赫兹科学与电子信息学报,2014,12(2):256-259.
[11]刘凯,梁晓庚,李友年.基于粒子滤波的非线性目标跟踪算法研究[J].四川兵工学报,2014,35(11):14-17.
Research on Target Tracking for OutliersRejection Based-on Particle Filter Algorithm
ZHANGKun,TAO Jian-feng,LIYi-li
(School of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
When Particle Filter is applied to target tracking,anomalies discontinuity in measurement data,turning maneuver of the target,the number of particles and the importance of probability density function all can lead to the occurrence of the large errors outliers,which seriously affect the target tracking.It is difficult to handle outliers,when the targetmaneuvers.Focusing on this problem,combining wright guidelines with maneuver threshold guidelines,this paper puts forward the concept of uncertain observation and the outliers rejection particle filter applied to maneuvering target is designed.The simulation results demonstrate that the method can effectively detect and update outliers,reduce the tracking error and improves the performance of the prediction.
particle filter(PF),maneuvers target tracking,nonlinear filtering,outliersdiscrimination
TN974
A
1002-0640(2016)09-0098-05
2015-07-04
2015-08-18
张昆(1992-),男,陕西咸阳人,硕士研究生。研究方向:雷达目标检测与跟踪。
