基于Inventor运动仿真创建凸轮轮廓的方法
2016-10-17钟晓勤侯怀书
吴 斌,钟晓勤,侯怀书
(上海应用技术学院 机械工程学院,上海 200235)
基于Inventor运动仿真创建凸轮轮廓的方法
吴 斌,钟晓勤,侯怀书
(上海应用技术学院 机械工程学院,上海 200235)
以Inventor草图为骨架装配机构,根据预定的从动件运动规律在Inventor运动仿真环境下创建出凸轮轮廓,并通过实例验证了创建的凸轮机构符合设计要求.该方法创建过程便捷、设计结果正确、创建方法适用性广,为凸轮轮廓的设计提供了一种简便可行的方法.
运动仿真;运动规律;凸轮轮廓
0 引 言
凸轮机构在机械和半自动机械中应用广泛,通常凸轮作等速运动,驱动从动件按设定的运动规律作直线运动或摆动.在设计凸轮机构时,一般都事先设定从动件的运动规律,再按从动件的运动规律设计出凸轮的轮廓.获取凸轮轮廓的方法有图解法和解析法两种,两种方法的基本原理一样,都是采用反转法原理.其中图解法作图过程繁琐,且更换条件后需要重新作图,优点是作图结果直观形象;解析法需要建模编程,一次编程后可以在不同条件下使用.两种方法共同的不足是不能对所获得的凸轮轮廓进行验算[1].
采用基于Inventor运动仿真创建凸轮轮廓相对来说也非常方便,且无需编程,利用Inventor尺寸驱动的功能可使创建的凸轮轮廓适应不同的工作条件,最有利的一点是,可以对获得的凸轮机构进行运动仿真,生成从动件的运动规律,从而检验凸轮轮廓是否符合要求.
1 基于Inventor运动仿真创建凸轮轮廓
1.1 运动仿真的基本要求
案例1:某包装机构的下折纸运动采用了偏置直动滚子从动件盘形凸轮机构来实现,如图1所示,要求凸轮以200r/min逆时针作等速转动,凸轮基圆半径为80mm,偏距为20mm,直动滚子从动件行程为40mm,滚子半径为10mm,从动件的运动规律如表1所示.

图1 偏置直动滚子从动件盘形凸轮机构

表1 从动件运动规律
1.2 仿真前准备工作
在Inventor运动仿真创建凸轮轮廓时,可以通过导入样条曲线的方式获取任意指定的从动件运动规律.根据案例要求,可以结合电子表格Excel生成所需的样条曲线.电子表格中必须有两列内容,一列为时间系列,即凸轮以200r/min等速回转相应角度时所耗费的时间,其二是修正位移,即相应时间所对应的从动件相对凸轮转动中心的垂直位移.选取时间和修正位移两列数据,生成“.txt”文本文件待用.
1.3 运动仿真创建凸轮轮廓方法[2,4-5]
通过运动仿真创建凸轮轮廓步骤如下:
(1)分别创建四个零件图,为从动推杆、机架、凸轮轮心和滚子,各零件图均用概念草图[3]表达.
(2)创建装配图,装配四个零件,如图2所示.

图2 四个零件的装配图
(3)由“环境”菜单选择“运动仿真”选项,在浏览器窗口找到“标准类型”中的“平移:(机架1,推杆1)”,激活其特性上的的自由度选项卡,启用“位置”作为驱动条件,选择“输入图示器对话框”,在下拉菜单中选择“样条曲线”,加载上述的“.txt”文本文件,生成推杆位移线图,如图3所示.

图3 样条曲线生成的推杆位移
(4)运动仿真,在输出图示器上选择“轨迹”命令,在弹出框上,勾选数值和轨迹选项,轨迹原点选取推杆的尖顶点,参考系选取凸轮心.
(5)激活构造模式,设定凸轮心旋转运动的角速度为1200deg/s.再运行仿真,且设定仿真时间为0.3s.仿真后生成凸轮的理论轮廓如图4所示.

图4 生成凸轮轮廓
(6)在输出图示器的浏览器中选择轨迹,单击右键选择“输出到草图”命令,在图形窗口选定凸轮心,即可得到凸轮理论轮廓的零件图.
(7)打开凸轮心的零件图,可以见到该零件图已作改变,多出了一条样条曲线,该样条曲线即为所求凸轮的理论轮廓曲线,即图5中的样条曲线.利用偏置功能,将理论轮廓曲线向内偏置.从轮心向外作任一径向线,通过两曲线修剪得到一个线段,将线段长度定为滚子半径,则偏置后的轮廓曲线自动调整为与理论轮廓法向等距为滚子半径的实际轮廓曲线.

图5 凸轮的轮廓曲线
2 运动仿真创建凸轮轮廓的优势
2.1 实时检验凸轮轮廓的正确性[2,4-5]
(1)新建装配图,分别载入上述的四个零件图,其中零件凸轮心中新增出凸轮廓线.需要注意的是,凸轮和滚子的装配必须在运动仿真窗口进行.
(2)转入到Inventor运动仿真环境,在浏览器窗口中产生的标准联接中没有凸轮与从动件之间的运动约束联接,需要通过“插入运动类型”,选择插入“传动:凸轮-滚子运动”,生成凸轮与滚子的运动副.
(3)“仿真”面板激活构造模式,选择凸轮心的旋转运动,激活其特性上的自由度选项卡,启用“速度”作为驱动条件,设定凸轮转速为1200deg/s.
(4)对机构进行运动仿真,录制动画.在输出图示器中,选择输出推杆的位移线图,如图6所示,其结果与要求的运动规律一致,说明通过仿真获得的凸轮轮廓是正确的.

图6 运动仿真生成的推杆位移线图
2.2 运动仿真创建凸轮轮廓便捷、适用范围广
2.2.1 适用于摆动从动件
案例2:凸轮连杆机构中,凸轮转动后通过摆杆带动滑块左右移动,滑块行程、各杆长和凸轮轴心位置已知,但凸轮轮廓未知,如图7所示.现要求按滑块的运动规律设计主动凸轮的轮廓曲线[1:习题6.11].
设计步骤如下:
(1)新建6个零件图,分别为摆杆、机架、连杆、滑块、滚子及凸轮心.
(2)新建装配图,将以上6个零件载入并装配,得到如图7所示的装配图.

图7 创建摆动从动件轮廓装配图
(3)在Inventor运动仿真环境下,激活滑动直线运动的自由度选项卡,启用位移驱动条件,并打开“输入图示器对话框”,载入代表滑块位移的样条曲线,如图8所示.

图8 滑块的速度线图
(4)运动仿真,在输出图示器上添加轨迹:原点选取滚子中心点,参考系选取凸轮心.
(5)激活构造模式,设定凸轮心旋转运动的角速度为常量后运行仿真,获得所需的凸轮轮廓,结果显示如图9所示.

图9 挥动从动件凸轮轮廓
2.2.2 利用尺寸驱动可快速获得不同结果
案例3:在案例1中,若改变其运动条件,如凸轮基圆半径为60mm,偏距为15mm,直动滚子从动件行程为60mm,滚子半径为10mm,从动件的运动规律改为表2所示.

表2 改变后的从动件运动规律
通过三个步骤即可获得新的结果:
(1)准备工作,在电子表格Excel中根据新的运动规律生成新的“.txt”文本文件;
(2)在机架零件图中改变偏距;
(3)Inventor在载入装配图时,将根据最新保存的零件图自动更新,之后,重新设置“平移:(机架1,推杆1)”,加载新的样条曲线”.
在三个步骤之后,在图形界面即可获得新的凸轮轮廓.同样,也可对新的凸轮轮廓进行验证,图10(a)为验证凸轮轮廓的机构装配图,图10(b)为仿真后获得的从动件运动规律,与要求一致.
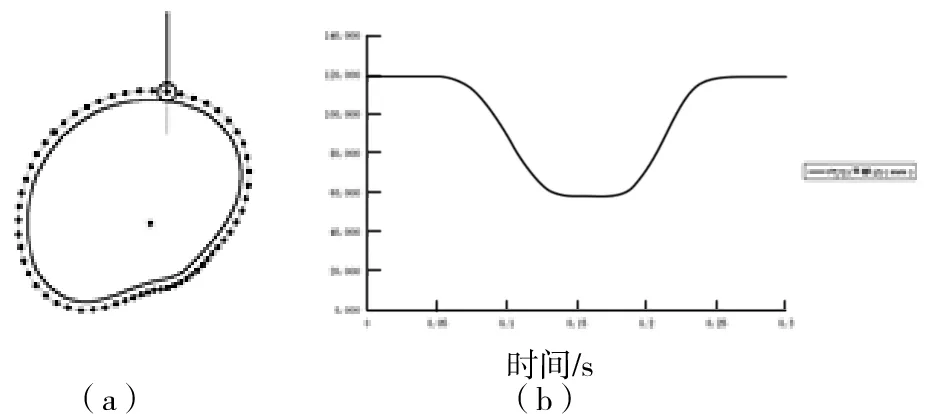
图10 改变条件后获得的凸轮轮廓
3 结论
基于Inventor运动仿真创建凸轮轮廓的方法简单、方便,创建过程中的图形与机构运动简图一致,在解释机构的运动原理方面具有很大的优点.利
用Inventor尺寸驱动的功能改变某些尺寸可以得到不同的凸轮廓线,如改变基圆半径、改变偏距、改变运动规律等.并且,可以对获得的凸轮机构进行运动仿真,直观地检验凸轮机构是否符合要求.
基于Inventor运动仿真创建凸轮轮廓适用范围较广,除适用于不同的从动件运动形式外,还可用于移动凸轮等情况.生成的凸轮轮廓座标点可直接用于凸轮的数控加工.因此,基于Inventor运动仿真创建凸轮轮廓具有较好的推广应用价值.
[1] 朱 理.机械原理[M].北京:高等教育出版社,2010.
[2] 唐湘民.Autodesk Inventor有限元分析和运动仿真详解[M].北京:机械工业出版社,2009.
[3] 吴 斌.基于Inventor概念草图仿真在机械原理中的应用[J].上海应用技术学院学报,2014(1):54-56.
[4] Autodesk.Inc.Autodesk Inventor 2011高级培训教程[M].北京:电子工业出版社,2011.
[5] 胡仁喜,董永进,郑 娟,等.Inventor10中文版机 械设计高级应用实例(第2版)[M].北京:机械工业出版社,2006.
Method of Creating Cam Profile Based on Inventormotion Simulation
WU Bin,ZHONG Xiao-qin,HOU Huai-shu
(School ofmechanical Engineering,Shanghai Institute of Technology,Shanghai 200235,China)
The cam profile is created in the Inventormotion simulation environment based on the Inventor sketch as the skeleton assemblymechanism.And an example is given to verify the creation of cammechanism,which tomeets the requirements of the design.The process is convenient; the design is correct and themethod is suitable for wide application.It provides a simple and feasiblemethod for the design of cam profile.
simulation;motion law; cam profile
2015-11-12基金项目:上海市教育委员会重点课程资助项目(10210M151008).作者简介:吴 斌(1971-),男,副教授,研究方向:机械设计、机电控制.
TP391.72
A
1671-119X(2016)02-0029-04
