视频监控系统中运动车辆的车标识别技术
2016-10-15杨正云
杨正云,王 林
(贵州民族大学理学院,贵州贵阳550025)
视频监控系统中运动车辆的车标识别技术
杨正云,王林
(贵州民族大学理学院,贵州贵阳550025)
车标识别技术是车辆识别技术新的研究方向,包括车标定位和车标识别两项关键技术。作者对复杂背景下运动车辆车标定位与识别技术进行了研究,首先,利用Sobel算子找到车辆图像中竖边缘区域,采用Shen算子进行水平方向平滑并二值化处理;其次,利用车牌的特征和纹理实现了对车牌的精确定位,再根据车牌与车标的特殊位置关系确定车标所在区域,用车标的先验知识与纹理特征实现对车标的分割;最后,通过支持向量机的方法对分割出的车标进行识别。实验结果表明,该算法简单有效,具有较好的鲁棒性和较高的识别率。
车牌定位;车标分割;支持向量机;车标识别;
随着我国经济的不断发展,人民生活水平的不断提高,每年都有大量的新增车辆上路,给交通管理带来极大的挑战,智能交通系统(Intelligence Traffic System,简称ITS)的研究被提到重要位置。在ITS中,基于视频图像的运动车辆识别技术是自动采集车辆特征信息的重要技术基础[1],而车标识别技术是车辆识别技术新的研究方向,是对基于车牌和车型识别的车辆识别技术的重要补充和发展。车标识别技术包括车标定位和车标识别两项关键技术。
目前,常用的车标定位算法有:(1)基于局部对称性特征的快速车标定位[2];(2)基于能量增强和形态学滤波的车标定位方法[3];(3)基于纹理一致性测度的汽车车标分割方法;(4)基于Adaboost的车标定位方法[4];(5)基于模块匹配的车标定位方法[5];(6)基于小波变换的车标定位[6]。
车标识别技术可分为基于区域的技术[7]和基于边缘的技术[8]。常用的识别方法可分为基于统计的方法、基于句法模式识别的方法、基于人工神经网络的方法等。
但由于汽车品牌与设计的复杂多样,各种品牌的汽车车标大小不一,位置与形状也各不相同,获取的视频图像背景复杂、光照不均、大小形状不一等情况,增加了车标定位和识别的难度。
本文提出了一种在复杂背景下对运动车辆车标定位与识别的方法。根据车牌与车标的特殊位置关系,在车牌定位的基础上,实现对车标的定位,用车标的先验知识与纹理特征将车标分割出来,并通过支持向量机方法对分割出的车标进行识别。
1 车标定位
通过仔细观察不难发现,几乎所有车辆的车标都处于车辆前脸中轴线上,且都位于车牌上方。由于车牌特征较丰富且形状基本统一,定位相对比车标容易。因此,利用车牌和车标的特殊位置关系,在车牌定位的基础上,能较好地定位车标。
1.1车牌定位
本文采用文献[9,10]方法对车牌进行定位。首先采用竖直方向的Sobel算子获取车辆图像的边缘图并用Shen算子对其作水平方向的滤波和进行二值化处理,通过去掉满足阈值条件的竖直、水平方向的连续线区域,得到了数量较多的候选车牌区域;然后根据车牌的先验知识去掉不满足长宽比阈值的区域,降低候选车牌区域数;最后再利用车牌的字符特征与纹理特征筛选出正确的车牌区域,处理结果如图1所示。
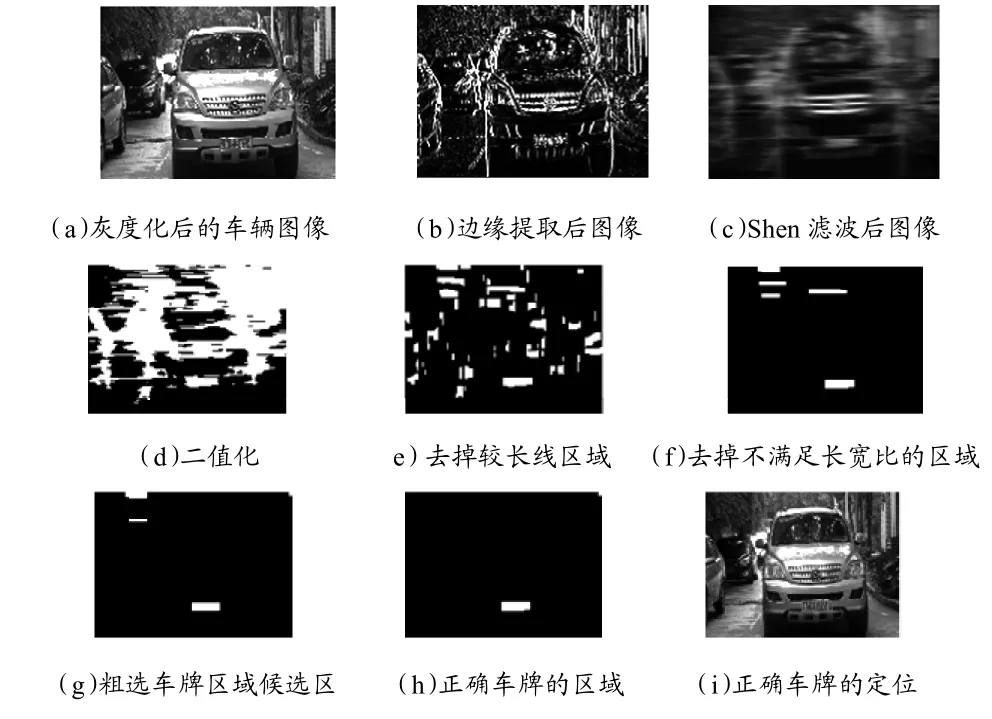
图1 车牌定位的处理流程图
1.2车标定位
1.2.1车标搜索范围
车牌定位后,为了快速有效地实现车标定位,利用车牌和车标位置关系的先验知识,将搜索范围限制在车牌的上方区域。本文根据车牌的位置,确定的车标搜索范围如下:
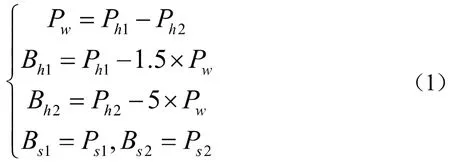
其中,Ph1、Ph2表示车牌在图像中的高度位置,Ps1、Ps1表示车牌在图像中水平位置,Pw表示车牌的宽度,Bh1、Bh2表示车标在图像中的高度位置,Bs1、Bs2表示车标在图像中的水平位置,实验结果如图2所示。

图2 车标定位处理结果图
部分车辆的车标粗定位图如图3所示。

图3 各种车标粗定位的实验结果图
1.2.2车标预处理
完成车标粗定位后,接着对车标进行精定位。在对车标进行精定位前,首先对车标图像进行预处理,以消除部分噪音的干扰。由于多数车标边缘的信息较丰富,作者采用Sobel算子对边缘进行提取。Sobel算子由两个卷积核组成,一个对竖直方向边缘响应较大,一个对水平方向边缘响应较大,如下所示:
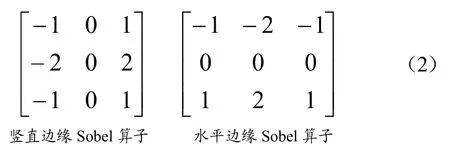
由于车标图像竖直方向的边缘信息较丰富,因此本文采用竖直边缘Sobel算子对车标图像进行边缘提取,并根据经验值自定义阈值,大于阈值的像素值设为1,小于阈值的像素值设为0,最后得到一幅只有0和1的灰度图像,使图像呈现黑白效果。在本文中,的取值为65,二值化的过程可用数学描述如下:

接着对二值化的图像进行数学形态学的开运算处理,膨胀和腐蚀这两种操作是形态学处理的基础。膨胀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为0,则该像素为0,否则为1。腐蚀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为1,则该像素为1,否则为0。
腐蚀的作用是消除物体边界点,使目标缩小,可以消除小于结构元素的噪声点;膨胀的作用是将与物体接触的所有背景点合并到物体中,使目标增大,可添补目标中的空洞。开运算是先腐蚀后膨胀的过程,可以消除图像上细小的噪声,并平滑物体边界。闭运算时先膨胀后腐蚀的过程,可以填充物体内细小的空洞,并平滑物体边界。图3中车标预处理的结果如图4所示。

图4 车标预处理结果图
2 车标分割
通过上述预处理可以看出,噪声比较少的图像通过预处理便可得到车标区域(图4a),但是大部分图像还是存在较严重的干扰(图4b、c、d)。因此,针对这种情况,本文对这几张图进行垂直投影来分析车标的特征,以方便进行精定位。车标粗定位图像的垂直投影图如图5所示。


图5 车标垂直投影处理结果图
其中,曲线表示车标粗定位的垂直投影图,垂直线表示中轴线。
研究发现,大多数的车标都位于车牌的正中上方,从图5也可看出,车标图像不管有没有噪声的干扰,车标投影图都处在图像的中间,并呈现出“几”字型,本文的重点就是要找到“几”字型左右两边的低谷点,由此来消除低谷点两边的噪声,具体步骤如下。
(1)从左向右搜索满足以下条件的低谷点I(i,j):
1)I(i,j)=0&I(i,j)<I(i,j-1);
2)I(i,j)=0&I(i,j)<I(i,j+1);
3)I(i,j)<I(i,j-1)&I(i,j)<I(i,j+1);
4)I(i,j)=I(i,j-1)&I(i,j)<I(i,j+1);
5)I(i,j)<I(i,j-1)&I(i,j)=I(i,j+1);
(3)算出垂直投影图中的中轴点:zhon_zhu= round(n/2);如果步骤(2)中的满足该式:P2(i)〈zhon_zhu&P2(i+1)〉zhon_zhu;便记下这两个波谷点
车标消除左右噪声后的处理结果如图6所示。
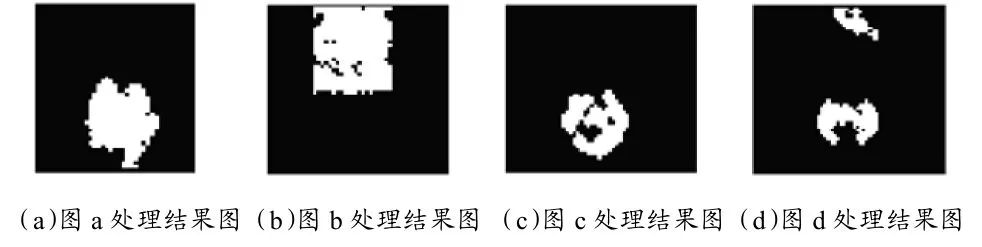
图6 消除左右噪声处理结果图
通过图6可以看出,图b、图c车标左右两边的噪声得到了很好的抑制,但是图d位于车标正上方的部分噪声并没有消除掉。虽然车标的形状大小不统一,但是大部分车标都是左右对称的,并且在垂直方向上,虽然车标与车牌的位置关系不确定,但是车标总是在车牌的上方,位于车身的垂直中轴线上,通过中轴线算出候选车标图像的对称性,既可以判断候选车标图像是否位于中轴线上,又可以判断候选车标图像左右是否对称。根据以上信息便可对车标进行精定位,如图7所示。

图7 中轴线结果图
根据图6,可以通过以下步骤筛选出正确的车标位置:
(1)找到图d中各个候选车标区域的最大左右边缘点值:left_p(i)和right_p(i),分别求出left_p(i)和right_p(i)到中心轴的距离Li(1)、Li(2)。
(2)算出差值Ki=Li(1)-Li(2)。

图8 消除多余噪声处理结果图
通过上述步骤,在车标粗定位图中就只剩下了车标图。通过填充,最终处理后的车标粗定位图经扫描上下左右边缘点,便可从图3的车标粗定位图中分割出车标,车标分割处理结果如图9所示。
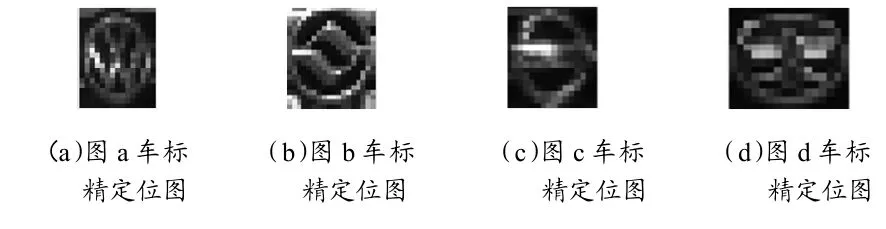
图9 车标分割结果图
3 车标识别
图像的特征一般有纹理、颜色、空间和形状等。由于车标纹理相对比较整齐,通过分类法很难区别各种车标的特征,所以本文以形状作为原始特征来进行识别。本文在对车标进行二值化的过程中,不仅保留了车标的形状,还保留了车标的纹理,通过建立二值化车标库,即可利用支持向量机分类器对待识别车标的二值化图进行识别。车标库是车标正确分类的关键。在实验中,本文从多幅图像中选择部分车标作为模板样本,并且每一种车标选取四张不同大小、光照的图像,以避免在识别过程中,由于一张图像匹配误差过大而导致识别结果无效的情况。一种车标有多张图像不仅可以保证识别的准确性,还可以避免识别过程中的误判。
完成了待识别车标的特征提取和车标库的建立后,即可采用分类器对待识别车标进行识别。其中分类器[11]包括最小距离分类器、贝叶斯分类器、支持向量机分类器和神经网络分类器等,因为支持向量机分类器设计简单并且能够满足实时性要求,所以本文选择这种分类方法。
支持向量机[12],一般简称SVM,是一种二类分类模型,其基本模型定义为特征空间上的间隔最大的线性分类器,其学习策略便是间隔最大化,最终可转化为一个凸二次规划问题的求解。支持向量机的最终问题则转化为对线性判别函数和判别面的求解,利用线性判别函数涉及多类分类器,有多种方法:(1)可以把类问题转化为个两类问题,其中第 个问题是用线性判别函数把属于类和不属于的点分开;(2)更复杂的方法是用个线性判别函数,把样本分为个类别,每个线性判别函数只对其中的两个类别分类。线性判别函数是指的各个分量的线性组合函数:

设计线性分类器,就是利用训练样本集建立线性判别函数,而设计线性分类器的主要问题就是利用训练样本集寻找准则函数的极值点和常见的准则函数有:Fisher准则函数、感知准则函数、最小平方误差准则函数等,进而进一步得到最优分类函数:

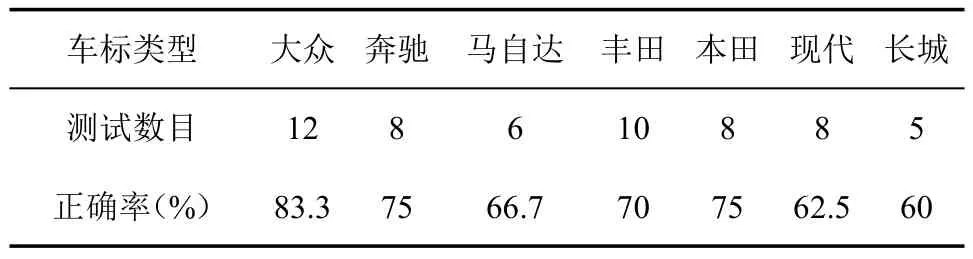
表1 各种车标识别效果
从实验结果可以看出,识别的正确率不是很高,主要是由于本文采用视频中的一幅图像来作处理,车标图案受光照和环境的影响较大,在待识别前进行二值化时信息损失较严重,从而影响了识别效果,对于这个问题还需进一步研究。
4 结束语
本文首先对车牌进行精确定位,并利用车标与车牌的特殊位置关系,对车标进行粗定位,接着采用Sobel算子、数学形态学滤波等一系列的算法对车标进行预处理,然后再根据车标的先验知识与纹理特征对车标进行分割,最后采用支持向量机对待识别车标进行分类识别。实验结果表明,该方法简单、有效且有较高的识别率。
[1]J Barroso,Lbulas-Crus,E L Dagless.Real-time Number Plate Reading[C].4th IFAC Workshop on Algorithms and Architectures for Real-time Control.Vilamoura,Portugal:AARTC,1997.70-73.
[2]肖飞,王运琼,刘丽梅,等.基于局部对称性特征的快速车标定位[J].计算机科学,2010,(37),298-300.
[3]李贵俊,刘正熙,游志胜,等.基于能量增强和形态学滤波的车标定位方法[J].光电子·激光,2005,16(1):76-79.
[4]Anagnostopoulos C N E,Anagnostopoulos I E,Loumos V C.A license plate recognition algorithm for intelligent transportation system applications[J].IEEE Intelligent Transportation Systems,2006,7(3):377-392.
[5]刘皓.高清图像中基于车牌定位的车辆跟踪和违章检测[D].南京:南京理工大学,2012.
[6]Humayun,Karim Sulehria,YeZhang.Vehicle Logo Recognition tion Using Mathematical Morphology[C].Processing of the 6th WSEAS Int.Conference on Telecommunications and Information,Dallas Texas,2007.22-24.
[7]Arun Kumar M,Gopal M.Reduced One-against-all Method for Multiclass SVM Classification[J].Expert Systems with Applications,2011,38(11):14238-14248.
[8]王玫,王国宏,高小林,等基于PCA和边缘不变矩的车标识别新方法[J].计算机工程与应用,2008,44(4):224-226.
[9]Qian Cui,Lin Wang,Shuihe Ge,et al.License Plate Location based on Direction and Edge Information[C].Second Asia-Pacific Conference on Computational Intelligence and Industial Application(PACIIA09),2009,vol 2.300-303.
[10]Renlon Pan,Xiaojuan Ma,Lin Wang,An Efficient Method for Skew Correction of License Plate[C].2th International Workshop on Education Technology and Computer Science,Vol 2,2010.90-93.
[11]孙娟红.车标识别方法研究[D].大连:辽宁师范大学,2011.
[12]Este A,Gringoli F.On-line SVM-traffic classification[C].Wireless Communications and Mobile Computing Confer ence,2011.1778-1783.
(责任编辑:朱彬)
On the Technology of Recognizing Moving Vehicle Logo in Video Surveillance System
YANG Zheng-yun,WANG Lin
(College of Science,Guizhou Minzu University,Guiyang 550025,China)
The technology of recognizing moving vehicle logo is a new orientation,which consists of two parts:location and recognition.The author of this paper has looked at the two kinds of technology.Firstly,use the Sobel operator to find the area where exist more vertical edges,then adopt Shen operator to smooth the horizontal direction and to make a binarization process.Secondly,get an accurate location of license plate based on the license plate features and texture feature,and ensure the logo area by the specific relations between license plate and logo location,achieving the segmentation of logo under the priori knowledge about logo and texture feature.At last,support vector machine method is adopted to recognize the segmental logo.The experimental results show that this algorithm is simple and effective,and has stronger robustness and a higher recognition rate.
license plate location;vehicle logo segmentation;support vector machine;logo recognition
TP391.4
A
1009-3583(2016)-0110-05
2016-01-14
杨正云,女,贵州镇宁县人,贵州民族大学理学院硕士研究生。研究方向:图像处理与模式识别。