基于EK-NN的水声目标识别算法研究
2016-10-14张扬杨建华侯宏
张扬,杨建华,侯宏
基于EK-NN的水声目标识别算法研究
张扬1,杨建华1,侯宏2
(1. 西北工业大学自动化学院,陕西西安710129;2. 西北工业大学航海学院,陕西西安710072)
针对水声目标信号复杂、样本获取难度大且富含不确定信息的问题,研究了一种新的证据K类近邻识别算法(Evidence K Nearest Neighbor, EK-NN)。首先在水声目标的各类训练样本中,根据特征距离大小选取待识别目标的K近邻,并构造其基本置信指派函数。然后使用证据理论中的Dempster-Shafer(D-S)规则对各类别下的近邻证据进行组合,最后再应用冲突置信的比例分配规则5(Redistribute Conflicting mass proportionally rule5, PCR5)将所有类别的组合证据进行融合,并根据融合结果和所设立的分类规则来判断目标的类别属性。根据水声目标实测数据,将新算法与其他几种常见的水声目标识别算法进行了对比分析,结果表明新算法能有效提高识别的准确率。
水声目标识别;证据理论;证据K类近邻算法(EK-NN);特征向量;组合规则
0 引言
无论军事还是民用方面,水声目标识别都有极其重要的应用背景[1-2]。尤其是在军事应用上,准确快速的目标识别是打击敌方舰船的关键,因此水声目标识别研究一直深受关注[3-6]。但由于水声目标类别众多,不同类别目标特征也存在极大相似性。另外,随着信息技术的高速发展,舰船和潜艇降噪技术也都有了飞速提升。这都为水声目标的准确识别带来了极大挑战[7-8]。
目前水声目标识别应用中,由于近邻改进算法(Improved K Nearest Neighbor algorithm, IK-NN)[9-10]和支持向量机改进算法(Support Vector Machine Ensembles algorithm, SVME)[11-12]简单直观、误差率低,因而备受欢迎也应用较为广泛。但是在识别系统中,受传感器探测精度、环境噪声等因素的影响,所获取的目标数据会包含一定的不确定性信息[13-14]。另外,目标识别的准确性也依赖于所构建模板库的完备性,而此条件实现起来往往比较困难,也使得数据的获取出现了不完全性[15]。这时传统的IK-NN和SVME受其算法框架的局限,不能十分有效地处理这部分不确定信息,在识别决策时易造成结果的误判。而证据推理理论[16]可以有效地处理这些具有不完全、不确定、不清晰的信息和数据,为问题的解决提供了全新思路。故一些学者提出将证据理论与传统的模式识别算法结合,研究基于证据框架的数据分类算法[17]。因此,本文结合证据推理中的D-S[16]、PCR5[18]组合规则与K近邻理论,研究了一种新的基于证据K-NN的水声目标识别算法(EK-NN)。最后通过水声目标实测数据的对比实验,验证了新算法的有效性。
1 证据组合规则
1.1 D-S组合规则
由证据理论[11]可知:两个或多个置信函数可以用D-S规则组合,通过计算基于不同来源置信度的正交和,从而获得一个新的置信函数。假定辨识框架上性质不同的两个证据B和C,其焦元分别为和(;),基本置信指派函数分别为、,按照D-S规则进行组合,则:
D-S规则作为证据的联合作用法则,满足交换律和结合律,可以推广到多个证据的融合当中;它计算简单,在多证据融合时能够快速收敛。
1.2 PCR5组合规则
D-S组合规则在证据“高冲突”时存在一定的局限,为此许多国内外学者都提出了改进方法[18-20]。最具代表的就是Dezert和Smarandache所提出的PCR5组合规则[18]:
其中,、为组合前两证据所分别包含的命题(这些命题由各焦元、及其交集和并集所构成)。PCR5根据矛盾双方基本置信的大小,将矛盾信息按比例进行了分配。这样,矛盾信息越大,融合后矛盾双方焦元所分配到的基本置信就会越大。因此PCR5在对“高冲突”证据融合时一般不会得出有悖常理的结论。但是,这是一种比较保守的分配方式,不利于焦元置信值的快速收敛和证据的快速决策。
1.3 新算法的组合规则选择
D-S和PCR5组合规则各有优劣,在新算法的水声目标识别当中,同类别间的近邻证据不存在“高冲突”,融合时可采用D-S规则以增强融合的时效性。不同类别间的证据由于置信分派所属类别不同,会存在一定的冲突,融合时可采用PCR5规则以减少融合的错误。
2 基于证据K-NN的水声目标识别新算法
为了有效处理水声目标识别中样本所包含的不确定信息,结合D-S、PCR5以及K近邻理论,研究了一种基于证据的K-NN水声目标识别算法(EK-NN)。该算法主要包括特征提取、近邻证据的构造和融合、分类决策三部分核心内容。
2.1 特征提取
水声目标信号通常为非平稳信号,小波变换是非平稳信号的良好分析工具[21-22]。此外,信号的时域波形结构特征简单直观,能反映其本质。因此提取水声目标的小波分析和波形结构特征,将组合后的特征作为目标的识别特征。具体过程如下:
首先对水声目标进行级小波分解,提取每级分解后的高频分量()。


然后根据水声目标原始信号波形的过零点、峰间幅值和波长差分布特性[19],提取水声目标的8维波形结构特征。
最后将提取的小波分析和波形结构特征进行组合,可得水声目标的维组合特征。
2.2 近邻证据的构造和融合
(1) 各类别下近邻证据的构造和组合

(7)
(9)
一共有类水声目标,经过这一步计算,最终得到个类别下bba’s的集合:。
(2) 类别间证据的融合
对于类水声目标的bba’s,应用PCR5组合规则进行融合,可得:
2.3 分类决策
首先,根据可传递信任模型[13],利用融合所得的全局计算待识别目标属于各个模式类别的pignistic概率。
然后,确定如下分类规则:
规则1:待识别水声目标所属类别应具有最大的pignistic概率,表示具有最大信任函数值的类就是目标类;
规则2:待识别水声目标所属类别与其他类别的pignistic概率差值必须大于某一阈值,表示每一证据对所有不同类的支持程度应保持足够大的差异;
规则3:待识别水声目标所属类别的基本置信指派值必须大于不确定性置信指派值,表示对目标知之甚少时,不能对其进行准确分类;
新算法流程图如图1所示。
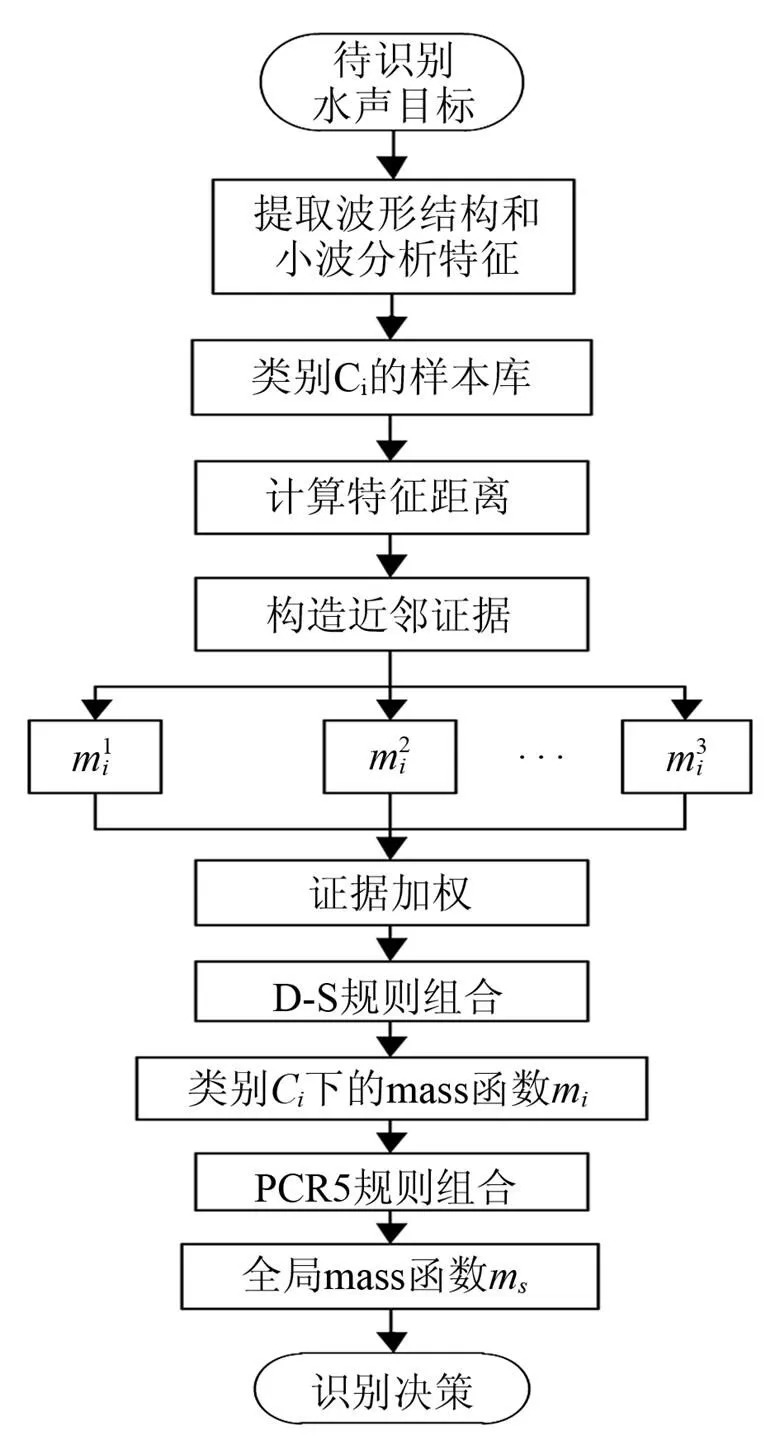
图1 EK-NN算法流程图
3 实验及结果分析
3.1 实验数据集
分类实验选取的对象是实测水声目标信号,信号采样频率为22 kHz,取4096个点为一个样本。对每个样本提取8维波形结构特征、10维小波分析特征,并将提取的以上特征进行组合,使得每个水声目标样本可以由18维的组合特征来进行描述。实验中水声目标分为水声通信信号(Type1)、主动声呐信号(Type2)、舰船辐射噪声(Type3)3类,共5000个样本。其中Type1有2000个、Type2有1600个、Type3有1400个。各类别下典型样本的提取特征如图2所示,训练样本、测试样本的数目如表1所示。
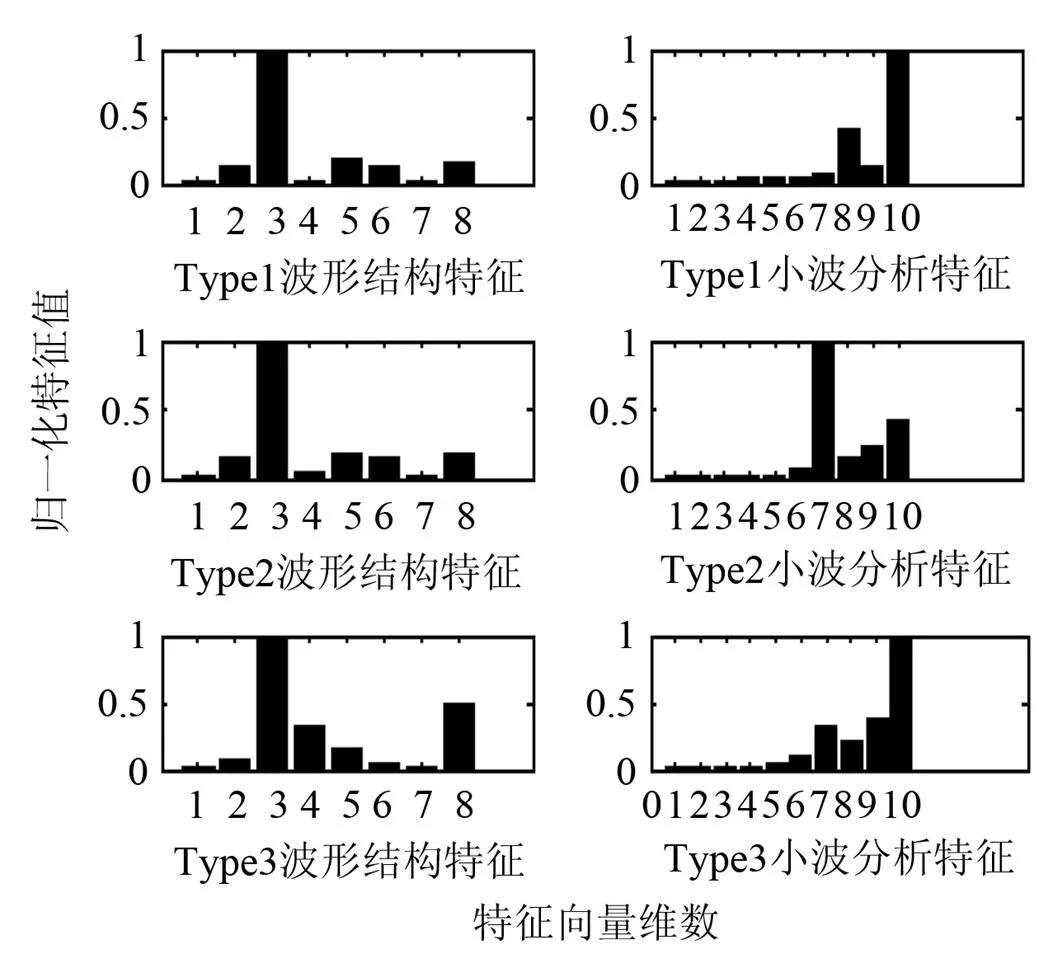
图2 各类别中典型样本的特征示意图
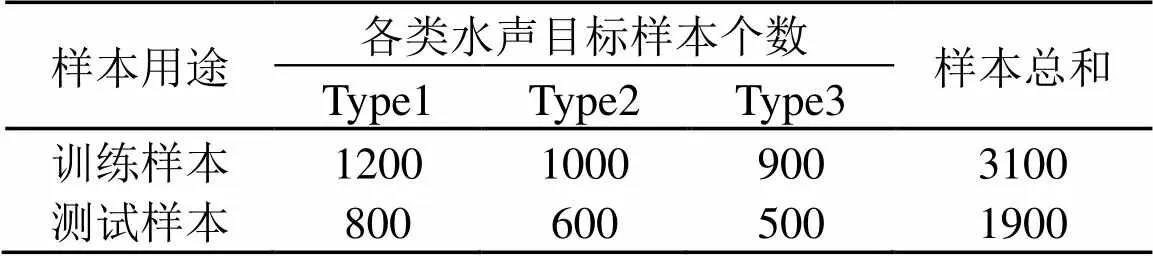
表1 训练样本和测试样本的数目
3.2 结果及分析
根据表1中的样本设定,分别采用IK-NN、SVME、以及EK-NN新算法进行分类实验。在采用EK-NN新算法时,分类决策的阈值参数设定为0.2。近邻数目分别选取为1、4、8,进行3次分类对比。具体实验结果如表2和图3所示。
从表2中可以看到,SVME与IK-NN的识别率比较接近,都维持在0.89左右。EK-NN在近邻数目为1时,相对于IK-NN和SVME识别率的提高不是很明显,其只有0.91。不过在为4时,识别率就有了极大的提升,基本保持在0.97以上。当近邻数目为8时,识别率则可以进一步达到0.98。而这时IK-NN的识别率也仅为0.892。另外从图3中的识别率曲线也可看到,在近邻数目相同时,EK-NN的识别率一直远远大于IK-NN。说明在算法计算复杂度相近的情况下,EK-NN算法能够比传统的IK-NN有着更好的识别性能。
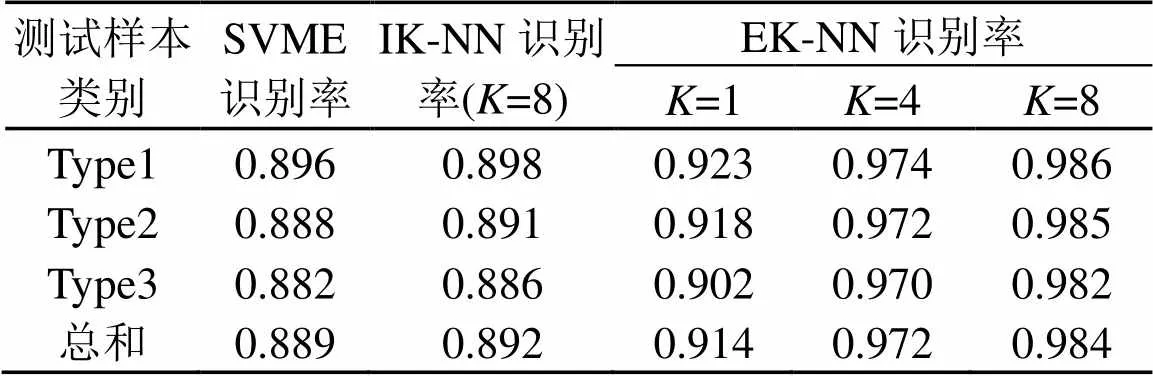
表2 各分类算法的实验结果
接下来通过目标的正确识别率和分类算法耗时两个指标,对新算法的性能进行实验分析。实验所使用的计算机型号为联想启天M4300,统计分类时间使用的软件为windows7系统下MATLAB2014a。实验的结果如表3所示。

表3 新算法性能分析
表3中显示,随着近邻数目的增大,新算法的识别性能会有所提升,但同时计算复杂度和计算耗时也会有所增加,这会导致算法的时效性变差。例如=4比=1时的计算时间只多了0.064 s,而识别率却可以提高5个百分点之多;=16比=8时的识别正确率只提高了0.005,但计算的耗时却增加了3倍之多。所以,在近邻数目较少时,随着近邻数目的增加,计算时间增加不是很大,却可以极大地提高识别正确率。但近邻数目较大时,随着近邻数目的增加,识别正确率增加很微小,但计算耗时却成指数上升。针对本次的水声目标识别实验而言,选取新算法的参数为4比较合理。因此,使用新算法时并非近邻数目越多越好,而是要根据具体识别任务对时效性和识别精度的综合要求,进行合理设定。
4 结论
针对水声目标信号所富含的不确定信息给分类识别带来的问题,本文研究了一种新的证据K类近邻识别算法。新算法通过构造近邻证据并运用证据规则进行组合的方式,能有效利用目标的多域组合特征,从而显著提高了目标的识别正确率。通过实测水声目标数据的识别实验,将新算法与传统的识别算法进行了对比分析,验证了新算法的有效性。最后对新算法的参数进行了实验分析,以便于在其他研究领域中的推广和应用。
[1] 宋波. 水下目标识别技术的发展分析[J]. 舰船电子工程, 2014, 34(4): 168-173.
SONG Bo. Development analysis of the underwater target recognition technology[J]. Ship Electronic Engineering, 2014, 34(4): 168-173.
[2] 戴健, 杨宏晖, 王芸, 等. 用于水声目标识别的自适应遗传样本选择算法[J]. 声学技术, 2013, 32(4): 332-335.
DAI Jian, YANG Honghui, WANG Yun, et al. An adaptive genetic instance selection algorithm for underwater acoustic target classification[J]. Technical Acoustics, 2013, 32(4): 332-335.
[3] 王磊, 彭圆, 林正青. 听觉外周计算模型在水中目标分类识别中的应用[J]. 电子学报, 2012, 40(1): 199-203.
WANG Lei,PENG Yuan,LIN Zhengqing. The application of computational auditory peripheral model in underwater target classification[J]. Acta Electronica Sinica, 2012, 40(1): 199-203.
[4] 刘准钆, 程咏梅, 潘泉, 等. 证据冲突下自适应融合目标识别算法[J]. 航空学报, 2010, 31(7): 1426-1432.
LIU Zhunga, CHENG Yongmei, PAN Quan, et al. Target identification by adaptive combination of conflicting evidence[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(7): 1426-1432.
[5] 禹亮, 程咏梅, 陈克喆, 等. 基于证据理论的水声多目标优选方法[J]. 西北工业大学学报, 2014, 32(3): 429-433.
YU Liang, CHENG Yongmei, CHEN Kezhe, et al. Underwater acoustic target optimum seeking using evidence theory[J]. Journal of Northwestern Polytechnical University, 2014, 32(3): 429-433.
[6] 石敏, 徐袭. 小波包熵在水下目标识别中的应用研究[J]. 计算机工程与应用, 2014, 50(1): 215-217.
SHI Min, XU Xi. Application study on underwater target recognition based on wavelet packet entropy[J]. Computer Engineering and Applications, 2014, 50(1): 215-217.
[7] 黄志远. 新规背景下的噪声控制技术应用[J]. 船海工程, 2014, 43(3): 95-98.
HANG Zhiyuan. Application of noise control technology under the background of new code[J]. Ship & Ocean Engineering, 2014, 43(3): 95-98.
[8] 刘译蔚, 杨建华, 侯宏, 等. 由波束形成的噪声源识别方法对比研究[J]. 噪声与振动控制, 2015, 35(1): 165-168.
LIU Yiwei, YANG Jianhua, HOU Hong, et al. Comparison of noise source identification methods based on beamforming[J]. Noise and Vibration Control, 2015, 35(1): 165-168.
[9] 纪正飚, 王吉林, 赵力. 基于模糊K近邻的语音情感识别[J]. 微电子学与计算机, 2015, 32(3): 59-62.
JI Zhengbiao, WANG Jilin, ZHAO Li. Speech emotion recognition based on FKNN[J]. Microelectronics & Computer, 2015, 32(3): 59-62.
[10] 刘先康, 梁菁, 任杰, 等. 修正最近邻模糊分类算法在舰船目标识别中的应用[J]. 计算机工程与应用, 2010, 46(9): 228-231.
LIU Xiankang, LIANG Jing, REN Jie, et al. Application of modified nearest neighbor fuzzy classification algorithm in ship target recognition[J]. Computer Engineering and Applications, 2010, 46(9): 228-231.
[11] 杨宏晖, 王芸, 戴健. 水下目标识别中样本选择与SVME融合算法[J]. 西北工业大学学报, 2014, 32(3): 362-366.
YANG Honghui, WANG Yun, DAI Jian. Instance selection and SVM ensembles for underwater acoustic target recognition[J]. Journal of Northwestern Polytechnical University, 2014, 32(3): 362-366.
[12] 杜方键, 杨宏晖. 两种半监督多类水下目标识别算法的比较[J]. 声学技术, 2014, 33(2): 10-13.
DU Fangjian, YANG Honghui. Comparison of two semi-supervised multiclass underwater target recognition algorithm[J]. Technical Acoustics, 2014, 33(2): 10-13.
[13] 韩德强, 杨艺, 韩崇昭. DS证据理论研究进展及相关问题探讨[J]. 控制与决策, 2014, 29(1): 1-11.
HAN Deqiang, YANG Yi, HAN Chongzhao. Advances in DS evidence theory and related discussions[J]. Control and Decision, 2014, 29(1): 1-11.
[14] 潘泉, 王增福, 梁彦, 等. 信息融合理论的基本方法与进展[J]. 控制理论与应用, 2012, 29(10): 1234-1244.
PAN Quan, WANG Zengfu, LIANG Yan, et al. Basic methods and progress of information fusion[J]. Control Theory & Applications, 2012, 29(10): 1234-1244..
[15] 陈雁飞, 夏学知, 胡丹桂, 等. 基于试探折扣修正的证据组合方法[J]. 电子学报, 2014, 42(4): 756-765.
CHEN Yanfei, XIA Xuezhi, HU Dangui, et al. Evidence combination based on tentative discount of evidences[J]. Acta Electronica Sinica, 2014, 42(4): 756-765.
[16] SMARANDACHE F, DEZERT J. Advances and Applications of DSmT for Information Fusion 5[M]. Rehoboth: American Research Press, 2004.
[17] 张扬, 侯俊, 刘准钆, 等. 一种新的证据K-NN数据分类算法[J]. 火力与指挥控制, 2013, 38(9): 58-60.
ZHANG Yang, HOU Jun, LIU Zhunga, et al. A new evidential k-nearest neighbor data classification method[J]. Fire Control & Command Control, 2013, 38(9): 58-60.
[18] SMARANDACHE F, DEZERT J. Advances and Applications of DSmT for Information Fusion 5[M]. Rehoboth: American Research Press, 2006.
[19] SMARANDACHE F, DEZERT J. Advances and Applications of DSmT for Information Fusion 5[M]. Rehoboth: American Research Press, 2009.
[20] 刘准钆, 程咏梅, 潘泉, 等. 基于矛盾因子和证据距离的加权证据合成法[J]. 控制理论与应用, 2009, 26(12): 1439-1442.
LIU Zhunga, CHENG Yongmei, PAN Quan, et al. Combination of weighted belief functions based on evidence distance and conflicting belief[J]. Control Theory&Applications, 2009, 26(12): 1439-1442.
[21] 石超雄, 李钢虎, 何会会, 等. 基于提升小波变换的MFCC在目标识别中的应用[J]. 声学技术, 2013, 33(4): 372-375.
SHI Chaoxiong, LI Ganghu, HE Huihui, et al. Application of the lifting wavelet transform based MFCC in target identification[J]. Technical Acoustics, 2013, 33(4): 372-375.
[22] 杨秀芳, 张伟, 杨宇祥. 基于提升小波变换的雷达生命信号去噪技术[J]. 光学学报, 2014, 34(3): 1-6.
YANG Xiufang, ZHANG Wei, YANG Yuxiang. Denoising technology of radar life signal based on lifting wavelet transform[J]. Acta Opitca Sinica, 2014, 34(3): 1-6.
K-NN based underwater acoustic target recognition algorithm
ZHANG Yang1, YANG Jian-hua1, HOU Hong2
(1.College of Automation, NorthwesternPolytechnicalUniversity, Xi'an 710129, Shaanxi, China;2. College of Marine Engineering, NorthwesternPolytechnicalUniversity, Xi'an,710072, Shaanxi, China)
In underwater acoustic target recognition, the target signal is usually complex and the samples which are difficult to obtain also have some uncertain information. In order to effectively solve these problems, a new underwater acoustic target recognition algorithm based on evidence theory(EK-NN) is presented. In this new method, the basic belief assignments (bba’s) are determined by using the feature distances between the object and its K nearest neighbors in each class of the training set, and then the bba’s in each class are combined with Dempster-Shafer (D-S) rule. Finally the combined results in each class are fused by Redistribute conflicting mass proportionally rule5(PCR5), and the object can be recognized by the fusion result and the classification rule presented in this paper. Several experiments based on real underwater acoustic data sets are made to test the effectiveness of EK-NN in comparison with some other methods. The results indicate that EK-NN can effectively improve the recognition accuracy.
underwater acoustic target recognition; evidence theory; Evidence K-Nearest Neighbor(EK-NN); feature vector; combination rule
TP391.4
A
1000-3630(2016)-01-0015-05
10.16300/j.cnki.1000-3630.2016.01.004
2015-05-06;
2015-09-15
张扬(1988-), 男, 陕西西安人, 博士研究生, 研究方向为噪声控制、声目标定位与识别。
张扬, E-mail: zhangyang_yang2008@163.com