舰船配电网络短路故障快速定位及协同保护策略
2016-10-14贺慧英周仕万
张 涛,黄 靖,贺慧英,周仕万
舰船配电网络短路故障快速定位及协同保护策略
张 涛,黄 靖,贺慧英,周仕万
(海军工程大学电气工程学院,武汉 430033)
本文对同步发电机三相短路的短路电流变化率表达式进行了数学推导,分析不同短路条件下,短路电流初始变化率随系统参数,短路点位置及短路合闸角变化的规律,在此基础上,提炼出判断短路故障的方法。提出一种基于协同策略的船舶配电网络选择性保护方法,该方法将这些分散的保护装置有机地联系起来,对提高船舶配电网络保护的有效性具有重要意义。
舰船 短路故障 快速定位 协同保护
0 引言
本文提出一种舰船配电网络短路故障快速定位及协同保护策略,将保护装置设计为具有故障电流检测、电流上升率计算和协同处理功能的智能体结构。分析了基于短路电流变化率的故障定位原理,提出协同原理保护策略,给出了保护装置协同动作关系及一般原则。针对三级配电网络,给出每一级保护装置的具体协同策略。完成了基于协同策略的舰船配电系统保护装置结构方案设计和实验硬件平台的搭建。实验结果验证了短路故障快速定位和协同保护策略及硬件设计的有效性。
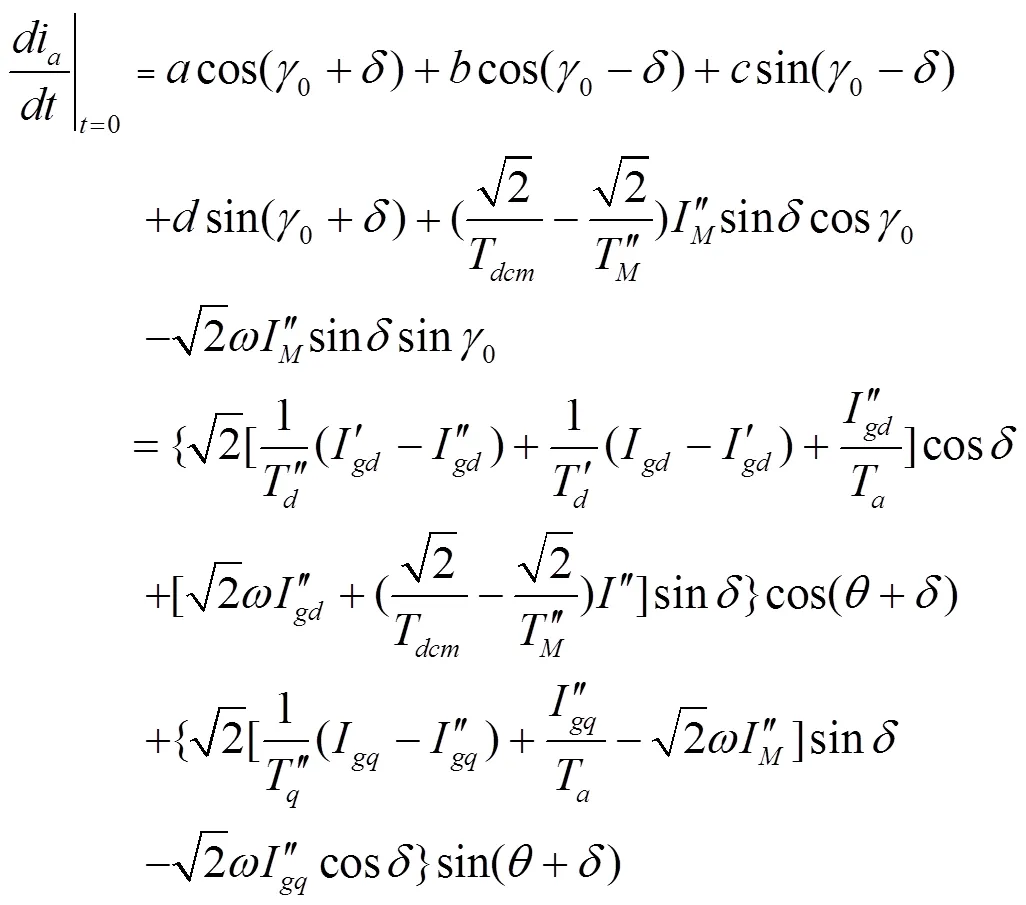
1 基于电流变化率的短路故障快速判断方法
其中:
考虑短路时刻电动机向短路点馈流影响,将标幺值系统转化为实际值系统得:
计算出最小运行工况下,ABC三相初始上升率中最大短路上升率的最小值。计算公式为:

最大运行工况下,ABC三相初始上升率中最大短路上升率的最大值。计算公式为:
由最小运行工况下的MAX可以求出Max,由最大运行工况下的MAX可以求出Max。
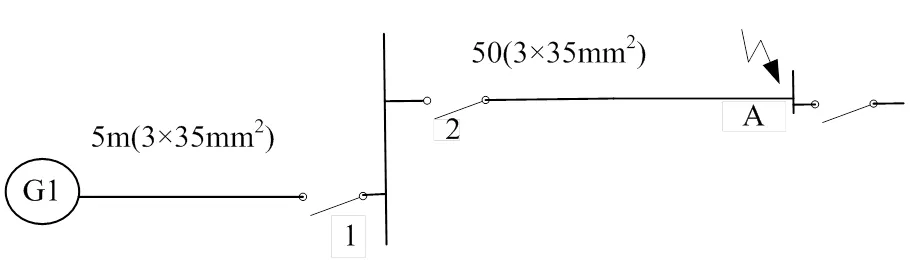
图1 最小运行工况短路电流计算电路
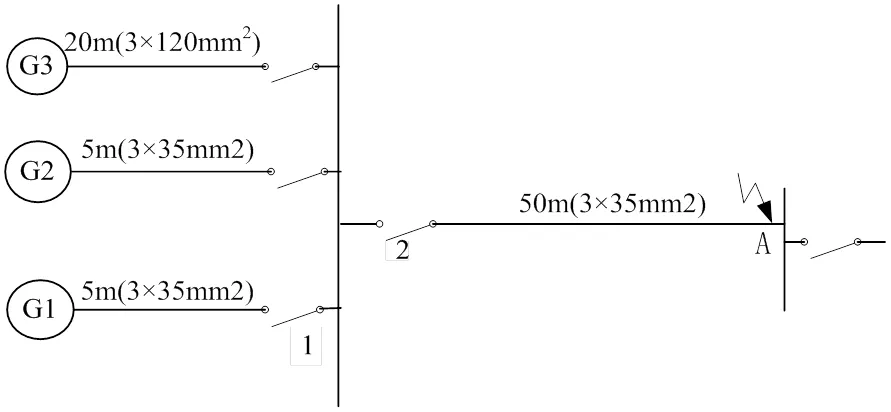
图2 最大运行工况短路电流计算电路
综合考虑ABC三相设定短路电流上升率整定值。为确保短路电流上升率诊断灵敏性和可靠性,考虑到正常工作下,噪声的干扰等因素,结合ABC三相短路初始电流上升率,选取Max作为短路故障整定值,大于Max即可认为是干扰。这样可以在短路初始时刻就能很好地诊断出短路故障,大大缩短了短路故障诊断时间。
2 基于多机通信的短路故障定位原理分析
为了将继电保护系统这样一个分布式的离散结构有机结合起来,本文把保护系统中的每一个保护器件设计成相应的智能节点,这些智能节点具有检测功能、故障保护整定功能、通信功能和协同保护功能。
在通信中,首先给通信中的每一个保护装置分配一个唯一的地址。然后定义通信信息为三种数据状态:第一种数据状态为数值“2”,表示判定结果为出现短路故障;第二种数据状态为数值“1”,表示判定结果为未出现短路故障;第三种数据状态为数值“0”,表示未接收到下级保护装置数据。所有通信数据由下往上级联发送。
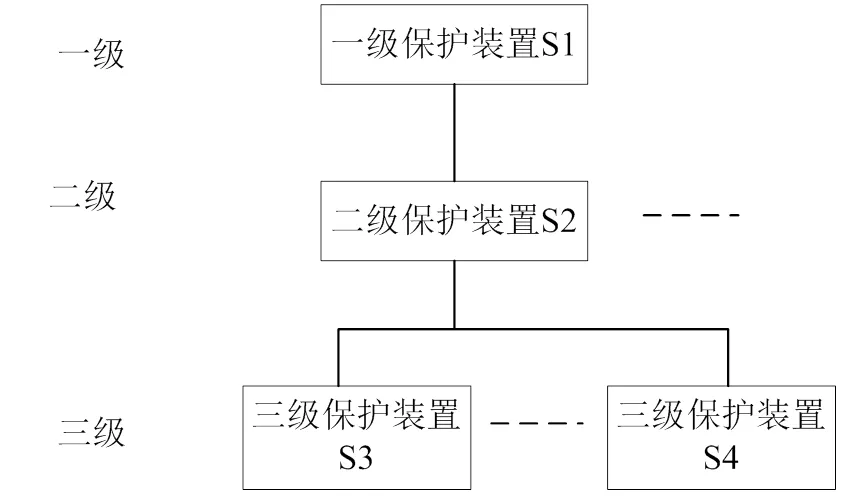
图3 三级单片机通信模型
定义保护装置之间通信数据,利用通信数据实现短路故障定位。在图3中,三级保护装置位于配电网络末端,只要三级保护装置检测到短路故障,则确定为该保护装置末端短路。二级保护装置检测到短路故障并接收三级保护装置数据,数据为“2”则故障出现在三级保护装置以下;数据为“1”则短路故障出现在二级保护装置和三级保护装置之间;数据为“0”,表示二级保护装置未接受到三级保护装置数据,认为三级保护装置已损坏,则短路故障出现在二级保护装置以下。一级保护装置检测到短路故障并接收二级保护装置数据,数据为“2”则故障出现在二级保护装置以下;数据为“1”则短路故障出现在一级保护装置和二级保护装置之间;数据为“0”,表示一级保护装置未接受到二级保护装置数据,认为二级保护装置已损坏,则短路故障出现在一级保护装置以下。
3 基于通信协同的选择性保护策略
对舰船交流电力系统配电网拓扑结构进行分析,如图4所示,保护装置通过通信将判断结果发送给上级保护装置,同时接收下级保护装置判断结果,完成了自身电流检测、故障判断和故障定位。
每级保护装置动作依据主要包括两项:一是保护装置本级的检测判断结果;二是接收到的下级保护装置数据,下级保护装置数据由故障判断结果和动作状态。保护装置动作原则:本级检测、计算、判断出短路故障时,接收下级保护装置故障判断结果,根据前一节故障定位原理,决定本级保护装置是否动作切除故障。
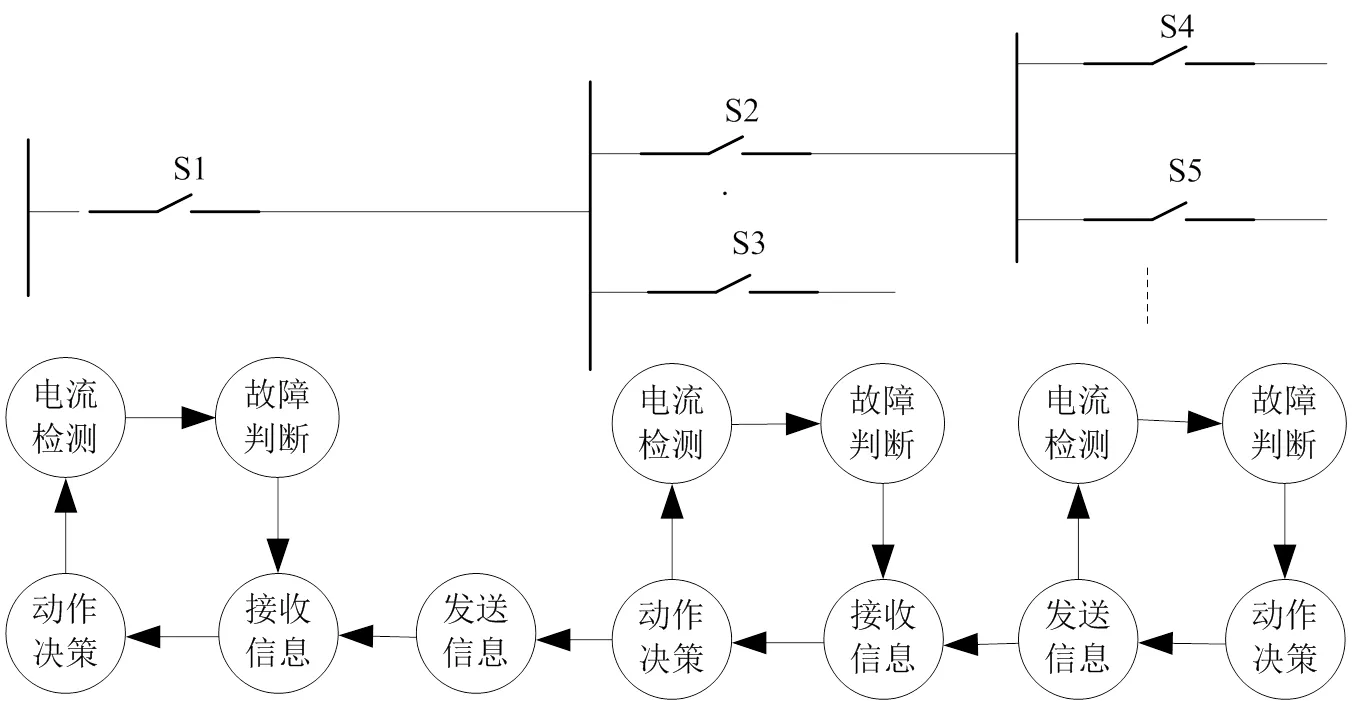
图4 三级船舶辐射型配电网络
下面给出三级配电网中保护装置的协同策略,以二级为例。
二级保护装置协同策略:保护装置S2自身检测出短路故障,还需要接收S4和S5的判定结果,然后根据前面的故障定位原理,完成故障定位。再结合自身检测判定结果做出动作决策,并将检测判定结果和动作决策发送给一级保护装置。二级保护装置S2动作策略如表2所示。

表2 保护装置S2动作决策
4 保护装置结构设计
检测及保护整定计算功能,是保护装置利用电流传感器对流过保护安装点的电流进行检测,检测到的电流经过A/D转换器送给智能模块,智能模块完成对接收到的电流进行上升率计算和分析并做出故障判定;利用通信功能保护装置将判断结果和自身动作状态发送给上级保护装置,同时接收下级保护装置判断结果和动作状态,保护装置的智能模块综合上下级保护装置的判断结果与自身判断结果做出故障定位和切除动作,协同处理实现选择性保护。保护装置整体结构如图5所示。
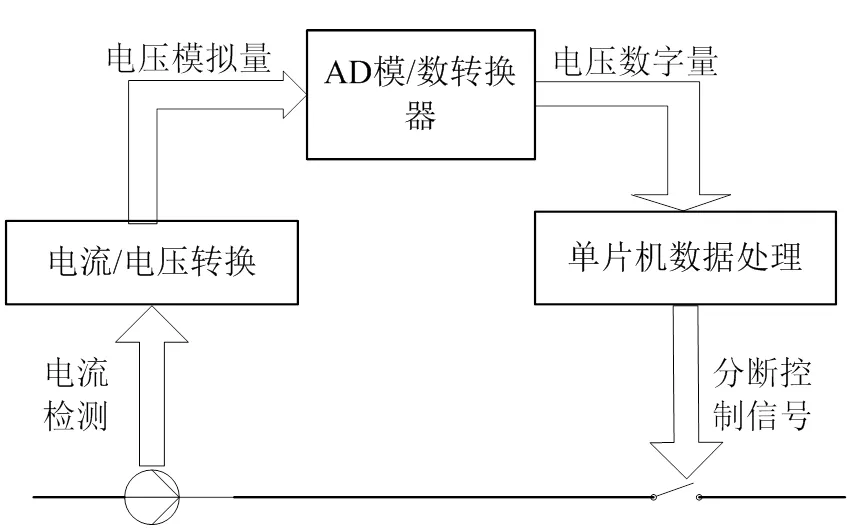
图5 保护装置整体结构
电流检测模块主要是将船舶配电网络中流过保护装置的电流转换成可供读取的小电流信号,再将电流转换为电压信号。本文主要是针对短路故障进行检测与保护,短路时流过保护装置的电流较大,为满足检测和控制需求,且不影响配电网络工作,采用霍尔传感器检测配电网络中的电流。为满足计算整定、快速判定故障和多机快速通信,单片机处理模块选择32位处理ARM单片机LPC1768,CAN总线支持分布式控制和实时控制的串行通信网络。
为实现上下级保护装置判断结果快速通信,满足保护装置一对多的通信协同处理。本文选择具有多主通信方式、较高抗干扰性和较好实时性的CAN总线通信,完成保护装置之间的多机通信。
5 基于通信协同策略的选择性保护方法实验验证
实验目的:验证基于通信协同策略的选择性保护方法能否实现选择性,保护装置之间通信协同策略实现的快速性。实验主要从短路电流获取、AD转换和通信实现选择性切除短路故障三个方面进行。
5.1实验电路
选择性保护二、三级保护装置系统电路如图6所示,图中S2和S4分别为前面定义的二级、三级保护装置的代表,KM为短路接入控制接触器,主要控制突加短路故障。保护系统利用电流传感器对电流数据进行采集,利用4个电流传感器,对B相和C相电流进行采集,由i=-(i+i)计算得出A相电流,电流传感器型号为:LMK(BH)-0.66CT,变比为900 A/5 V,电流电压转换电阻为10 Ω。发电机组为单台模拟同步发电机,容量为:5 kVA,额定电压380 V,额定电流12.55 A。由于实验条件有限,同步发电机不能反复进行短路实验,本实验通过突加大负载的方式模拟短路。利用在四分之一周期内短路电流和突加大负载相似特点,模拟短路电流,来验证基于电流上升率的整定,不影响整个基于通信协同策略的选择性保护系统功能实现。
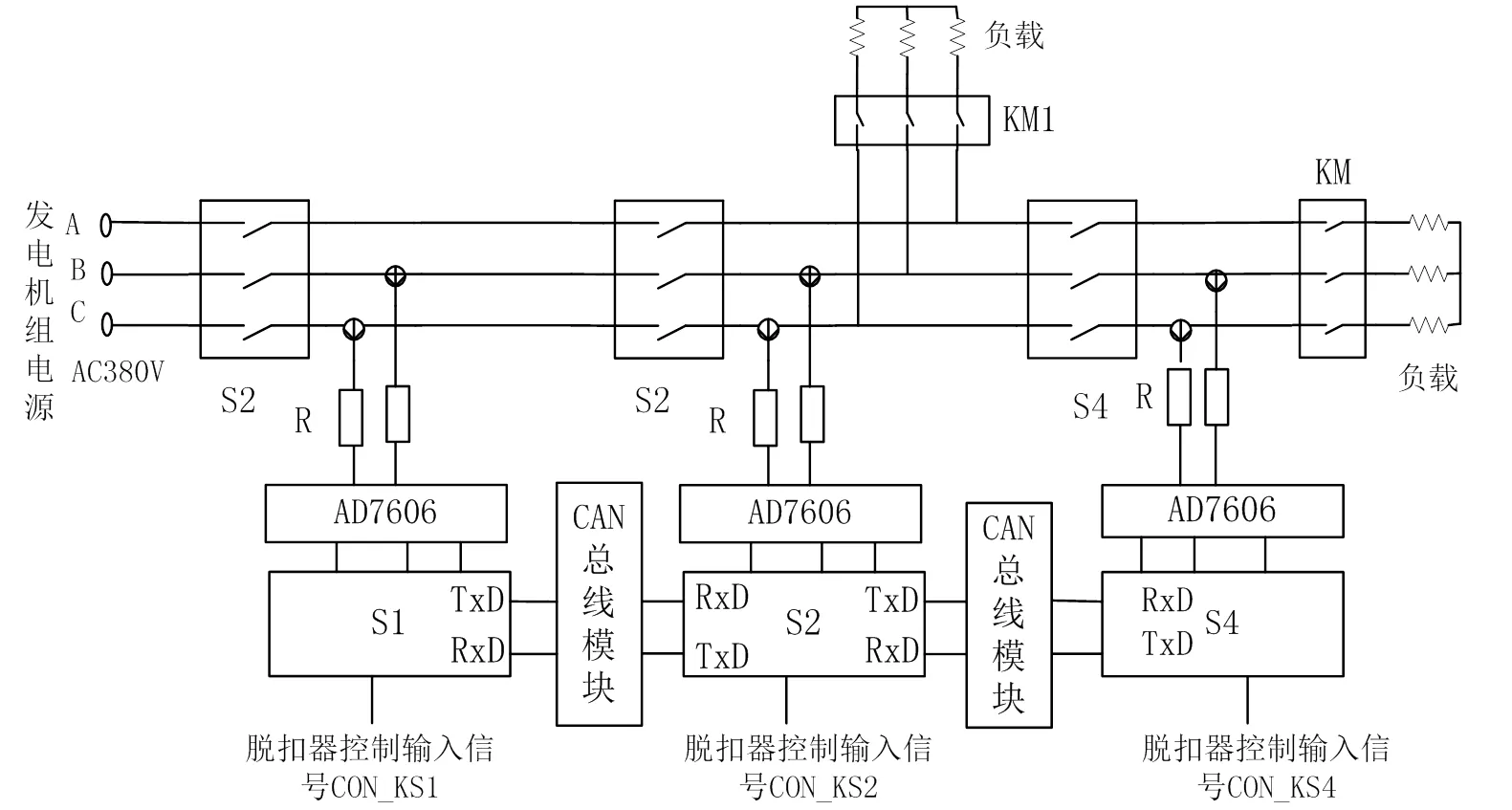
图6 三级舰船辐射型配电网络
短路前系统工作状态:S2和S4主接触器合闸接通,KM接触器断开,流过保护装置S2和S4电流为0,四个传感器检测电流为0。
系统短路工作状态:KM合闸,接入短路故障,短路电流流过保护装置S2和S4,四个传感器检测到短路电流。S2和S4按照通信协同策略切除故障。选择性保护系统实物图如图7示。
5.2 实验数据及分析
实验中短路前为空载,流过霍尔电流传感器的电流为0;短路后流过霍尔传感器的电流为短路故障电流。
末端短路,二、三级保护装置短路故障通信和S4切除故障波形如图8所示。图中四条波形,第①条为A相电流波形,第②条为二、三级保护装置通信状态波形,第③条为三级保护装置S4输出的脱扣器动作控制信号,第④条为二级保护装置S2输出的脱扣器动作控制信号。
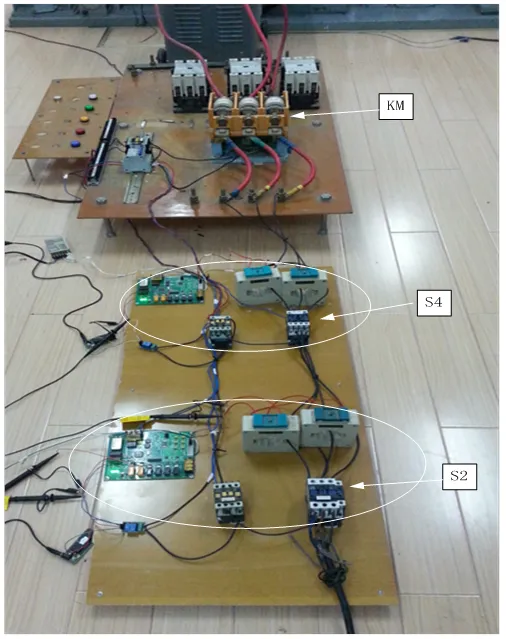
图7选择性保护系统实物图
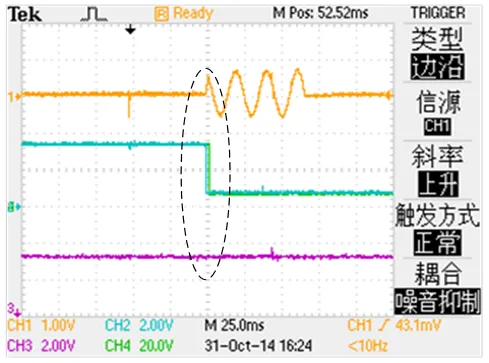
(a)故障电流切除波形
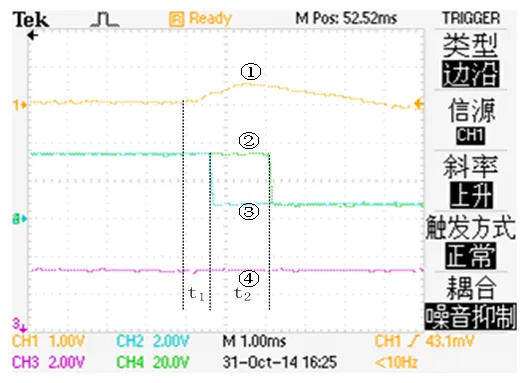
(b)局部放大图
由A相电流波形可见,电流峰值为20.42 A,初始电流上升率达到15.70 A/ms。针对本实验系统,S4和S2上升率动作判据整定值为14.85 A/ms。
图8(b)中,1为短路初始时刻至三级保护装置S4输出脱扣器动作控制信号的间隔时间,约为400。在1时间段内二、三级保护装置S2和S4同时完成了电流检测和上升率故障判断,且三级保护装置S4按照动作策略,直接输出了脱扣器动作控制信号,触发断路器跳闸。2为S4输出脱扣器动作控制信号至二、三级保护装置S2和S4完成通信的间隔时间,约为1。在完成通信之后S2根据协同策略得出不动作的判断结果,因此,未输出脱扣器动作控制信号,即图中第④条波形未出现下跳沿。由此说明,保护系统完成了故障检测、故障检测、计算整定、通信协同决策到脱扣器控制信号输入,验证了末端短路时,保护系统通信协同策略的正确性和有效性。
6 总结与展望
针对舰船配电网络在大短路电流下常出现上下级保护装置同时跳闸的问题,提出一种舰船配电网络短路故障快速定位及协同保护策略。完成基于短路电流变化率快速判断短路故障方法。完成了基于通信协同策略的船舶配电系统短路故障点位置确定以及保护装置结构方案设计和实验硬件平台搭建。
实验验证了本文提出的舰船短路保护策略的正确性和有效性。在以下几个方面可开展进一步研究。1)在保证检测判断正确的前提下,希望能够提高通信处理速度,可进一步开展采样速率和脱扣器响应速度两方面的研究,来提高整个保护系统的处理速度。2)希望进一步找到一种响应时间快的继电器和接触器来提高故障分断的快速性。
参考文献:
[1] 刘强.智能电网继电保护技术探讨[J].江苏电机工程, 2010(02): 82-84.
[2] 蒋小平, 张鹏.智能继电保护装置的设计[J].科协论坛, 2011(11), 23-24.
[3] 冀路明, 张怀亮.舰船配电网络结构研究[J].舰船工程, 2009(02): 35-38.
[4] 李麟, 沈兵, 庄劲武.舰船电力系统[M].武汉: 海潮出版社, 2003.
[5] 杨虎.舰船电力系统微机保护与监测系统研究[D].武汉: 华中科技大大学, 2007, 06.
[6] Mihnko B D, Zoran M.Digital signal processing algorithm for arcing faults detection and fault distance calculation on transmission lines[J].electrical power and energy system, 2001, 19(3): 165-170.
[7] 张永文, 钟晓明.低压配电系统的选择性保护技术[J].电气技术, 2007(09): 59-64.
The Strategy of Fast Short Circuit Fault Locating and Coordinated Protection of Ship Distribution Network
Zhang Tao, Huang Jing, He Huiying, Zhou Shiwan
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033,China)
TM713
A
1003-4862(2016)10-0023-05
2016-08-02
张涛(1991-),男,研究生。专业方向:电力系统及安全运行。