舰艇动态磁性检测方法
2016-10-14阎齐方汪永浩
阎齐方,汪永浩,张 迪
舰艇动态磁性检测方法
阎齐方,汪永浩,张 迪
(91315部队,辽宁大连116041)
本文介绍了舰艇磁性检测方法分类、国内外研究现状,对比分析了舰艇磁性检测两种模式:动态磁性检测和静态磁性检测,重点讲述了动态磁性检测方法。
舰艇 动态磁性检测 静态磁性检测
0 引言
为了减少磁性武器对舰艇的威胁,各国海军均重视对舰艇磁场防护方法措施的研究,控制减小舰艇磁场以提高舰艇磁性防护能力。研究磁性武器装备及磁场防护方法,都需要对舰艇磁场情况有全面准确地掌握。舰艇磁性检测是针对舰艇磁性研究的基础,经常性的磁性检测是对舰艇磁性安全评估的重要措施。因此,发展舰艇磁性检测技术能够及时准确掌握舰艇磁性防护状态,给舰艇磁性防护措施方法和理论方法研究提供重要的数据支撑。从而提高舰艇磁性防护能力,有效应对各种磁性武器、航空磁探等威胁,保护舰艇生命力。
1 舰艇磁性检测的分类
目前各国海军采用的舰艇磁性检测技术根据舰艇运动状态分为两种:一种为静态舰艇的静态磁性检测,即舰艇相对磁传感器静止的磁性检测技术。该技术要求舰艇和检测设备相对固定,受地域环境等因素限制。另一种为动态舰艇的动态磁性检测,即舰艇相对磁传感器运动的磁性检测技术。动态磁性检测的另外一方面含义为磁性检测设备能够根据任务需要布置到任务区域,具有较强的机动性。
2 动态磁性检测技术的特点及国内外现状
动态磁性检测技术是近年来发展起来的一种新型检测方法,国外对动态磁性检测技术的研究比较成熟,已经建造了舰艇动态磁性监测站,研制了适用于检测舰艇动态磁场的磁传感器。如德国STN公司研制的MORA SYM型矢量传感器,采用DGPS定位,现已装配到德国海军;英国、法国、挪威也各自研制了集磁、声、电和压力一体检测的传感器,通过DGPS或红外等方式定位。目前各国发展磁性检测站以磁检测为主,结合多种类型传感器协同检测,形成全面测量舰艇物理场和海洋环境参数的综合检测系统。此外,根据有限的资料分析表明:美国、日本、俄罗斯、英国和意大利等国已经在港口、海峡和重要航道等地区建立了磁场检测系统,以探测水下航行的潜艇,保卫水道的安全。
我海军磁性检测现在主要采用静态磁性检测技术,如舰艇消磁站(车载式消磁站)、消磁船和潜艇洞库消磁站。舰艇消磁站是在海底布置磁传感器形成阵列对舰艇进行磁性检测。消磁船采用提拉磁传感器方式测量舰艇龙骨及左右舷下方某标准平面上磁场,从而检测舰艇磁场。潜艇洞库消磁站是通过在海底和洞壁布置的磁传感器对潜艇进行磁性测量。我军海军舰艇静态磁性检测比较成熟,动态磁性检测技术仍在研究中,已具备相关理论和技术条件,但还没有组建动态磁性检测机构。
3 舰艇磁性检测两种模式比较
目前,由于我海军舰艇磁性检测以静态为主,检测到的磁场是静止时舰艇的磁场,该种磁场信息无法完整、全部地反应舰艇运动时的磁场状态(如涡流磁场等),因此也就无法真实地评价舰艇磁性防护状态。我海军现行的舰艇磁性检测为“定期检测”模式,在舰艇两次检测的间隔时间内,无法及时地检测到磁性过早超标的舰艇,从而不能及时地进行磁性处理,无法保障舰艇安全,也存在对磁场并不超标的舰艇“定期”进行磁场检测的情况,浪费大量资源,占用宝贵的检测时间;另外,对执行远洋任务的舰艇无法进行定期的磁性检测。
动态磁性检测相比静态磁性检测具有很大优势,如在港湾出入口或重要水道海底,动态磁性检测可以经常性地检测经过测量区域时舰艇磁场,全面检测舰艇航行时磁场状况,真实评价舰艇磁性防护状态。进而提供磁性处理意见,充分利用资源,合理分配舰艇磁性处理时间。动态磁性检测系统构造简单,投资小,建设周期短。该系统由水下磁场测量系统、航迹测量系统和岸基(或船基)数据处理中心组成(如图1所示)。磁场传感器系统主要由能够进行自我姿态校正的磁通门传感器、数据采集模块、连接电缆和相应的辅助设备组成;数据处理中心主要由传感器接口控制台、舰艇定位系统、通讯系统和数据处理系统组成。由于构造简单,磁性检测使用的所有设备能够根据任务需要布置到任务区域,具有较强的机动性,能对执行任务舰艇在任务海域进行磁性检测,以保障舰艇在执行任务时的磁性安全。而且使用方便,检测时间短,能够在舰艇经过测量区域时自动采集舰艇磁场,而不需要舰艇回到消磁站或消磁船驻泊附近进行检测。
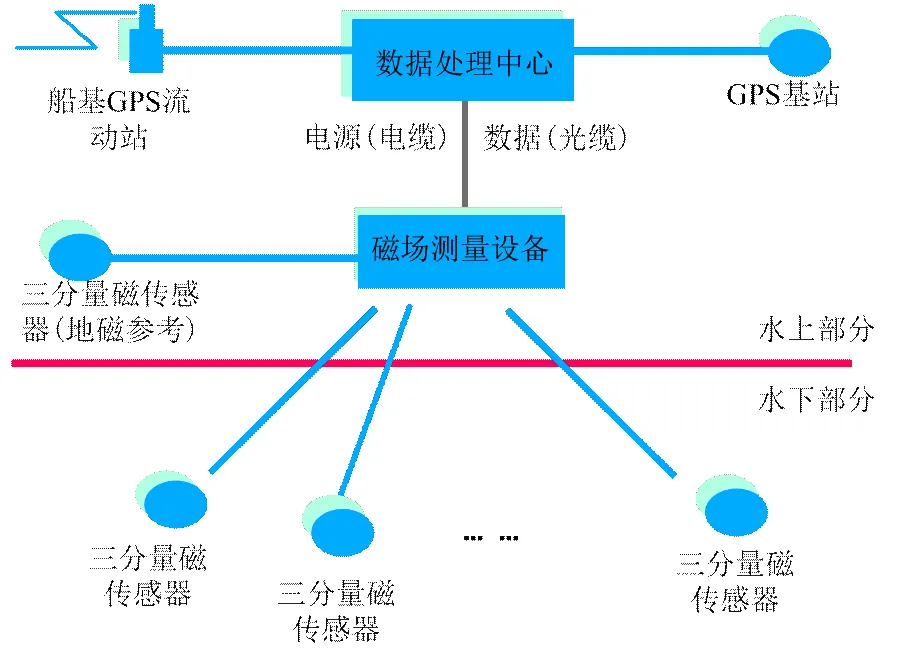
图1 动态磁性检测站示意图
动态磁性检测技术的主要特点是用途广泛,具有较广阔的拓展用途前景。动态磁性检测可以构成“栅栏式水下磁性防御网”来保卫港口、重要水道以及近海和海上重要目标安全。动态磁性检测还可以用来测量海洋磁场数据,从而研究磁暴的水下效应、海流磁场、海浪磁场等海洋磁场要素,建立有关的数据库和数学模型,为海洋磁场在其它领域的应用和研究提供基础资料。
4 动态磁性检测方法
动态磁性检测技术中的数据处理方法包括磁场数据预处理和传感器定位、舰艇磁场推算方法、消磁绕组调整方法和磁性目标跟踪识别方法等,如图2所示。
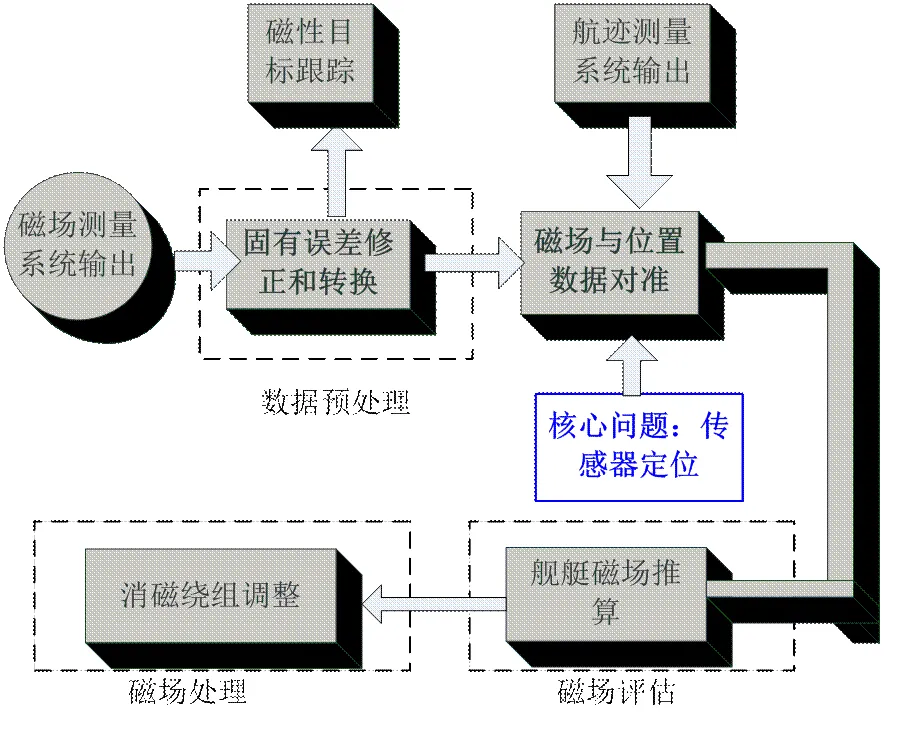
图2 动态磁性检测技术中的数据处理方法
4.1磁场数据预处理和传感器定位
在磁性检测中通常采用三分量磁通门传感器进行磁性检测,传感器的输出必须经过固有误差的修正,坐标系之间的相互转换之后才能获得磁场真值,称为磁场数据预处理。由于舰艇磁场是位置的非线性函数,这就说明在各采样时刻仅仅知道磁场测量值是不够的,我们还应当掌握各采样时刻传感器与舰艇中心的相对位置。目前国内外主要采用以下两种方法来确定传感器与舰艇的相对位置:1)主动定位:首先确定传感器相对于某参考点的位置,再利用其他手段(如DGPS,激光测距,红外等)确定目标与参考点的相对位置,借助该参考点可以推算传感器与目标的相对位置;2)被动磁定位:将舰艇磁场用若干个磁源来等效,然后利用测量数据反演磁源的位置和运动轨迹,从而确定各采样时刻传感器与目标的相对位置。两者相较之下,主动定位方式精度和可靠性都较高,且独立于舰艇的磁性状态,因此一般优先选用。总之,无论采用哪种定位方式,都需要预先知道磁传感器在海底的位置信息:主动定位需要知道传感器与参考点的相对位置,而被动磁定位一般要求知道传感器之间的相对位置。因此,对传感器实施准确定位是动态磁性检测能够正常工作的前提和基础。
4.2舰艇磁场推算方法
按目前的舰艇消磁条例,舰艇磁性状态的评估是针对舰艇标准测量平面上的磁场值来进行的,即将标准测量平面的舰艇磁场值与消磁标准作比较,来判断舰艇磁场是否符合要求。受实际测量环境(如测量水深,潮汐变化等)的限制,往往很难直接获得考核点上的磁场信息,这种矛盾在磁性检测站中显得尤为突出。因此,为了正确评估舰艇的磁性防护能力,进而给出合理的磁性处理建议,需建立满足换算精度要求,具有较强稳定性的舰艇磁场换算模型,将实际测量位置的磁场测量值换算到标准测量位置。
4.3消磁绕组调整方法
我海军舰艇一般都加装有舰载消磁系统,其主要目的为实时地补偿舰艇感应磁性。根据舰艇的使命任务、航行区域以及防御水雷等级,不同的舰艇将会设计不同的消磁绕组。当消磁绕组磁场分布曲线不能良好地抵消舰艇磁场分布曲线时,要进行绕组消磁线圈系统的优化调整。因此,研究发展消磁绕组优化调整方法是提高舰艇磁性防护能力的有效途径,也是动态磁性检测技术的最终目标。
4.4磁性目标跟踪识别方法
战时,采用潜艇封锁重要水道,渗透到敌方港内而对港内驻泊的舰艇发动突然攻击,以及对其他近海和海上重要目标(如离岸超级码头,海上石油平台等)实施水下偷袭是常用的战术。因此,需要建立相应的水下防御体系来保卫这些目标的安全。现有的水声探测系统要么造价昂贵,要么不适合噪音嘈杂的近岸环境,不太适合保卫这些目标。而利用水下目标的磁场信号来探测目标是比较可靠且精度较高的方法。采用动态磁性检测站就能够较容易地构建成“磁性防御网”。此时,磁性检测站的主要任务就是要快速准确地追踪目标(如水下潜艇等)的航迹和目标参数。因此,只有近距离磁性目标跟踪技术的发展,才能充分发挥磁性检测站在维护港口和重要目标安全等方面的重要作用。
5 结论
本文对舰艇动态磁性检测方法进行了分析研究,结合我国海军实际情况,通过对比分析,认为动态磁性检测技术在检测舰艇磁性状态、评估磁性防护能力、防卫重要的海上和近海目标安全、收集水中磁性目标磁场特征和采集海洋磁场数据等方面能够发挥重要作用。动态磁性检测技术中的数据处理方法包括磁场数据预处理和传感器定位、舰艇磁场换算方法、消磁绕组调整方法和磁性目标跟踪识别方法等,能够为我国海军发展舰艇磁场动态检测技术提供依据。
参考文献:
[1] 林春生, 龚沈光.舰船物理场[M].北京: 兵器工业出版社, 2007: 44-47.
[2] 张连魁. 舰船磁场分析-临时线圈消磁[M].武汉: 海军工程大学, 1991: 1-3, 42-51.
[3] 林春生. 舰船磁场信号检测与磁性目标定位[D].武汉: 海军工程大学, 1996.
[4] 陆坡. 舰艇磁性监测站网络化设想[J].舰船科学技术.2009: 31(10): 32-34.
Dynamic Magnetic Detection Method for Naval Ships
Yan Qifang, Wang Yonghao, Zhang Di
(Unit 91315, Dalian 116041, Liaoning, China)
TM937
A
1003-4862(2016)10-0017-03
2016-07-18
阎齐方(1977-),男,工程师。专业方向:舰船消磁。