基于多天线的GNSS压制式干扰与欺骗式干扰联合抑制方法
2016-10-14吴仁彪王文益贾琼琼
王 璐 吴仁彪 王文益 卢 丹 贾琼琼
基于多天线的GNSS压制式干扰与欺骗式干扰联合抑制方法
王 璐 吴仁彪*王文益 卢 丹 贾琼琼
(中国民航大学天津市智能信号处理重点实验室 天津 300300)
压制式干扰和欺骗式干扰是全球导航卫星系统(Global Navigation Satellite System, GNSS)面临的最常见且最有威胁的蓄意干扰。该文提出了一种基于多天线的GNSS压制式干扰与欺骗式干扰联合抑制方法。首先利用子空间技术抑制压制式干扰,然后利用解扩重扩算法获得的加权矢量进行欺骗式干扰识别和抑制,最后对无干扰信号再次使用解扩重扩技术形成指向真实卫星的高增益多波束。仿真结果证明所提方法可以同时抑制压制式干扰和欺骗式干扰。该方法不需要卫星来向信息,对阵列流形误差稳健。
全球导航卫星系统;压制式干扰;欺骗式干扰;子空间;解扩重扩
1 引言
全球卫星导航系统(Global Navigation Satellite System, GNSS)因其可以在任何时候任何地点提供精确的定位、测速和授时(Position Velocity Time, PVT)服务而在军事和民用领域得到了广泛的应用。然而,卫星信号到达地面非常微弱(通常比噪声低20 dB)且民用卫星信号格式公开,使其很容易受到干扰,其中压制式干扰和欺骗式干扰是两种最主要的蓄意干扰。
压制式干扰[1,2]是一种大功率带内强干扰信号,干扰功率超过GNSS系统本身信号处理增益,使接收机无法正常接收、锁定卫星导航信号,进而无法定位。压制式干扰主要包括带内窄带噪声干扰、同频带宽带噪声干扰和单频连续波干扰等。现有的压制式干扰抑制方法主要分为3类,即:时/频域(变换域)滤波、空域处理[6]、空时联合处理[7,8]。其中,利用阵列天线的空域处理技术能从空间区分干扰和信号,是目前比较常用的干扰抑制手段,经典的最小功率算法[9]属于此类。此外,文献[10]利用C/A码的自相干特性提出了一种盲自适应干扰抑制方法。文献[11]利用子空间技术及来向估计方法可以在抑制压制式干扰的同时提供信号处理增益。文献[12]在GPS/SINS(Global Positioning System/ Strapdown Inertial Navigation System)紧耦合的系统中利用星历和惯导系统提供的先验信息,形成多约束最小方差空时自适应波束,消除干扰并提高输出载噪比。
欺骗式干扰[13,14]是一种与真实卫星信号具有相似的功率水平、信号格式和频谱结构的弱干扰信号,这种干扰根据欺骗意图调整码相位、载波相位、电文内容等信息使接收机在无意识的情况下捕获、跟踪干扰信号,并解算出错误的定位结果,从而实现对接收机的控制。目前,欺骗式干扰抑制技术主要包括残留信号检测[15]、接收机完好性监视(Receiver Autonomous Integrity Monitoring, RAIM)[16]和空域处理技术。其中,空域处理利用了多数情况下欺骗式干扰由单天线发射多个PRN信号而真实卫星信号自不同的方向发射的特点,成为一种很有潜力的欺骗式干扰抑制方案。文献[17,18]利用天线间互相关处理估计出较强的欺骗式干扰子空间,再构造正交投影矩阵抑制欺骗式干扰。文献[19]通过对协方差矩阵特征分解提取欺骗式干扰的导向矢量,然后利用信噪比(Signal to Noise Ratio, SNR)最大化准则设计波束加权矢量。文献[20]分别采用波束形成方法及RELAX方法估计欺骗式干扰来向,然后利用多约束的波束形成方法抑制欺骗式干扰。文献[21]通过比较估计的欺骗式干扰来向与由导航电文解算的卫星来向,排除不一致的卫星。
一种更为复杂的情况是压制式干扰与欺骗式干扰同时存在,这种情况很可能发生在激烈的军事对抗中[22]。压制式干扰使接收机失锁一段时间,然后欺骗式干扰诱导接收机锁定在伪峰上。由于压制式干扰和欺骗式干扰具有完全不同的信号特性,因此能够同时抑制两种干扰的方法较少。文献[23]采用负对角加载的最小功率算法同时抑制两种干扰,但该方法不能提供信号处理增益。文献[24]采用最小功率抑制欺骗式干扰后,利用CLEAN方法估计欺骗式干扰来向并抑制的两步方法需要严格已知阵列流形。本文提出的两种干扰联合抑制的方法首先利用子空间技术抑制压制式干扰,然后采用解扩重扩算法[25]获得的加权矢量进行欺骗式干扰识别和抑制,最后对无干扰信号再次使用解扩重扩技术形成指向真实卫星的高增益多波束。仿真实验证明所提方法能有效抵抗压制式干扰和欺骗干扰的攻击,在真实卫星方向上提供高增益,且该方法不需已知阵列流形信息。
2 数据模型
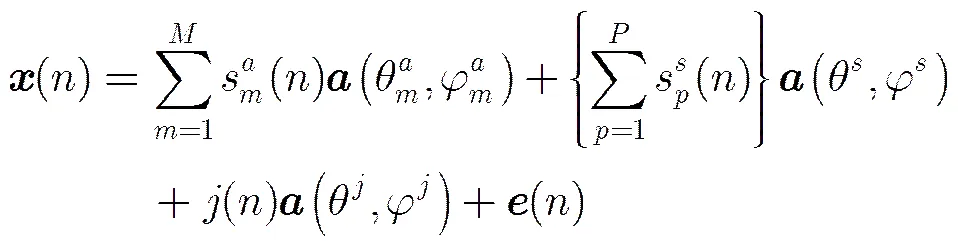
考虑压制式干扰与欺骗式干扰共存的环境(如图1所示),当两种干扰和颗真实卫星信号同时入射至元任意阵列时,经天线前端处理后的数字中频接收信号可以写为如式(1)的矢量形式:
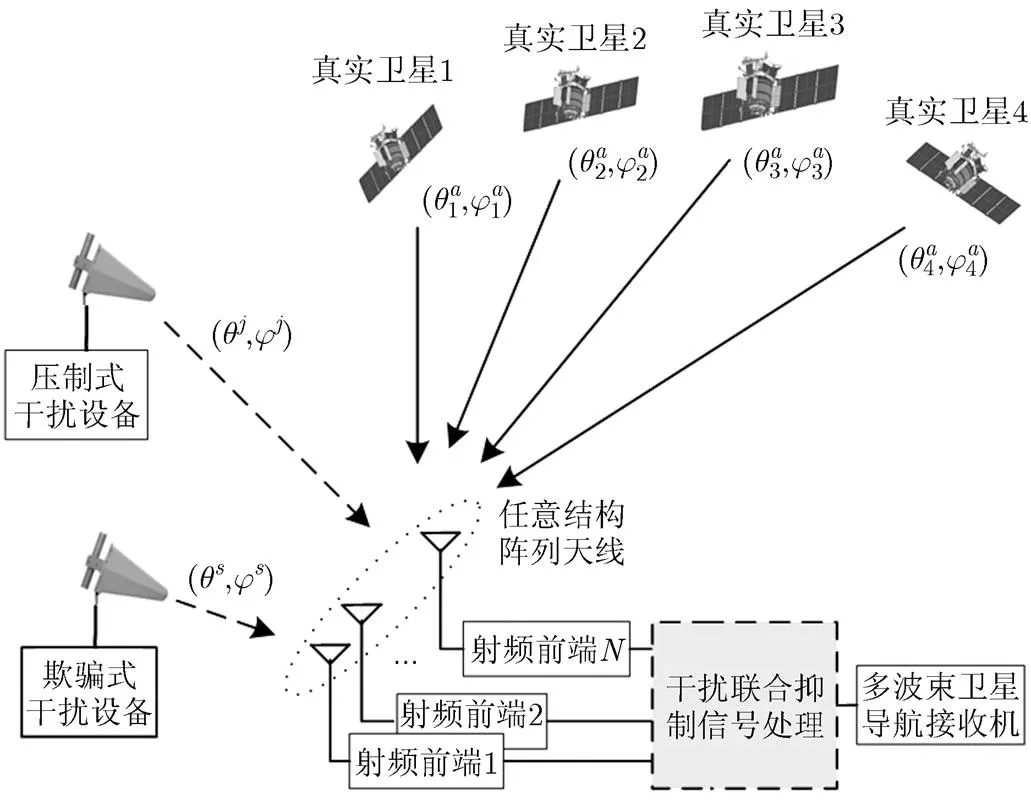
图1 压制式干扰与欺骗式干扰共存时阵列接收信号环境示意图
3 压制式干扰与欺骗式干扰联合抑制方法
由图1可见,所提算法属于“干扰联合抑制信号处理”部分,共包含4个步骤:压制式干扰抑制,欺骗式干扰检测,欺骗式干扰抑制和多波束形成。图2显示了所提方法的流程图,其中压制式干扰抑制是利用子空间正交投影技术实现的;欺骗式干扰检测是对投影后的数据计算所有捕获卫星的解扩重扩加权矢量,并利用欺骗式干扰的加权矢量相关性强加以识别;欺骗式干扰抑制部分构造了欺骗式干扰子空间,并进行正交投影;多波束形成部分通过重新计算每颗真实卫星的解扩重扩加权矢量实现最大化输出功率。处理后的输出信号送入多波束GNSS接收机进行跟踪和定位解算。
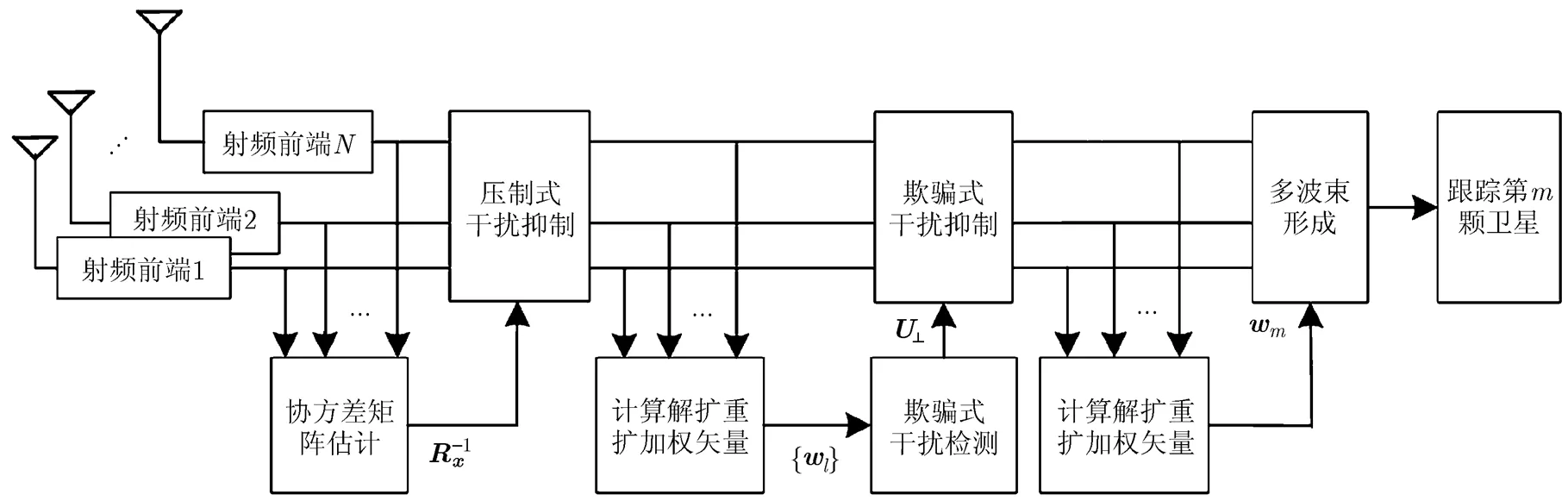
图2 所提算法流程图
3.1 压制式干扰抑制
首先,接收信号的协方差矩阵可以表示为
(3)
根据矩阵求逆引理,对式(3)两端求逆,可以得到
(5)

3.2 欺骗式干扰检测
接下来对式(6)的信号进行欺骗式干扰检测,这一步需要利用欺骗式干扰中的多个虚假卫星信号由单天线自同一方向发射的先验信息,即多个虚假卫星信号具有相同的导向矢量。由于该导向矢量不便于直接测得,而解扩重扩算法的加权矢量与信号导向矢量等价,因此,可以先求得解扩重扩加权矢量再通过欺骗式干扰对应的解扩重扩加权矢量的强相关性加以识别。
解扩重扩算法[25]先对GNSS信号进行解扩,检测出发射信号的第个比特的数据,然后利用本地码对重新扩频得到一个时间周期内的信号,并以此信号为参考信号,通过最小化参考信号与加权输出之间的距离实现自适应波束加权矢量的更新。以GPS民用信号为例,求解第颗卫星的解扩重扩加权矢量的代价函数为
(8)

(10)
解扩重扩算法的具体步骤如下:
步骤1 用式(6)的输出初始化阵列输出;
步骤2 对阵列输出进行捕获跟踪,获得已捕获的卫星的PRN号,码延迟和多普勒频率,这一过程称之为解扩;
步骤3 根据步骤2所得参数分别产生每颗已捕获卫星的参考信号,这一过程称之为重扩;
步骤5 计算阵列输出;
步骤6 重复步骤2~步骤5,直至算法收敛。
对每颗捕获到的卫星使用步骤1至步骤6,得到颗捕获到的卫星对应的解扩重扩加权矢量。这些由解扩重扩算法得到的加权矢量与信号导向矢量等价,并且在存在阵列幅相误差的情况下,仍与导向矢量高度相关,如图3所示。
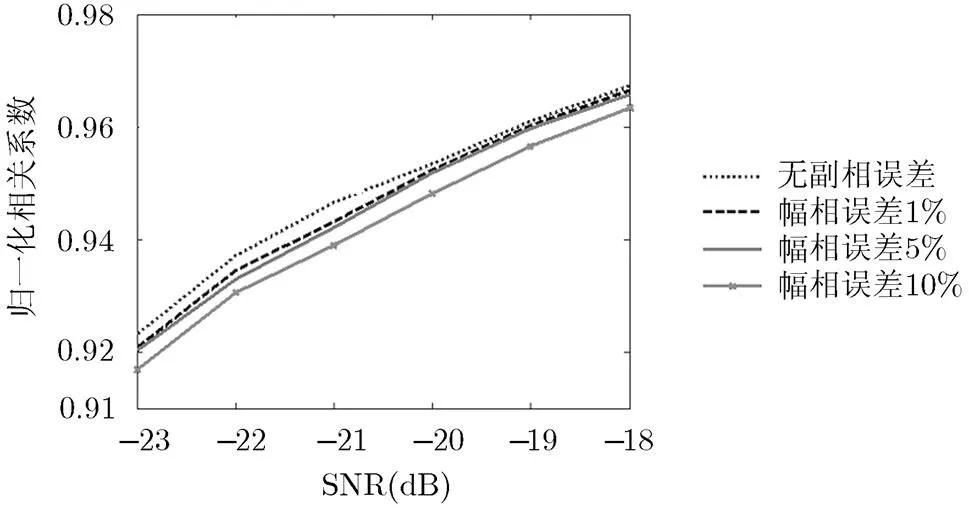
图3 解扩重扩加权矢量与导向矢量相关性
这些已捕获到的卫星可能含真实卫星,但更可能含欺骗式干扰,因为欺骗攻击者为达到目的往往通过加大功率等手段诱导接收机捕获虚假信号。在解扩重扩加权矢量集合中,已知属于欺骗式干扰的加权矢量具有强空间相关性,而属于真实卫星的加权矢量则不具有该特点。因此,对加权矢量集合中的所有矢量,两两之间计算相关性。如,矢量和,表示它们的归一化相关系数。当归一化相关系数大于时,可认为这两个矢量具有强空间相关性,即这一对加权矢量对应的信号来自同一方向,视为欺骗式干扰。
3.3欺骗式干扰抑制
根据式(11)的检测结果,欺骗式干扰的解扩重扩加权矢量可以构造欺骗式干扰子空间,记为

则其正交补空间为
(13)
3.4 多波束形成
4 仿真实验
本节通过仿真实验证明所提方法的有效性。仿真参数设置:天线阵为阵元数的均匀线阵,阵元间距等于GPS L1信号波长的一半。4个GPS卫星信号,,,分别从,,,方向入射到阵列上,信号功率为。接收机噪声为加性高斯白噪声,功率谱密度为,接收机带宽为。卫星数据为GPS模拟器产生的1频点高保真卫星信号,采样频率为5.714 MHz,中频为4.309 MHz。欺骗式干扰由,,,,的虚假卫星信号组成,从入射到阵列上,每个虚假卫星信号的信噪比为。压制式干扰从入射到阵列上,干噪比为。
图4比较了不同方法的阵列天线方向图,其中,图4(a)的PI方法为文献[9]的最小功率算法,图4(b)的LD-PI方法为文献[23]的基于负对角加载的最小功率算法,图4(c)为本文所提方法。图中的黑色虚线表示真实卫星来向,黑色实线表示压制式干扰和欺骗式干扰来向。从图4可以看出,3种方法均能在压制式干扰来向处形成深零陷,说明3种方法均能抑制压制式干扰;在欺骗式干扰来向上,PI方法零陷较浅,不能完全抑制欺骗式干扰,LD-PI方法和所提方法均能形成较深零陷;在真实卫星来向上,PI方法和LD-PI方法均产生了一定的衰减,且由于负对角加载处理加大了协方差矩阵小特征值发散的影响,LD-PI方法方向图的副瓣起伏更大,对真实卫星信号的衰减更多,而所提方法可以形成指向各颗真实卫星的波束,为真实卫星信号提供了阵列处理增益。
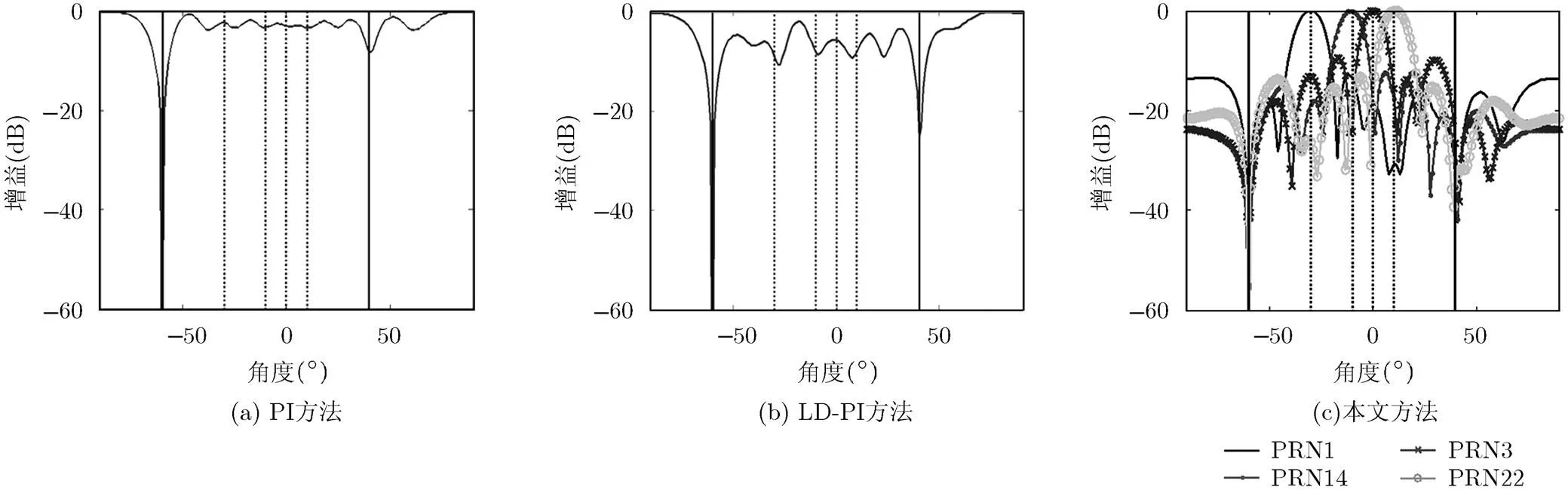
图4 不同方法阵列天线方向图比较
图5比较了使用不同方法进行干扰抑制后接收机的捕获结果,其中,图5(a)为PI方法,图5(b)为LD-PI方法,图5(c)为本文所提方法对方向的波束输出进行捕获的结果。图中,横轴表示捕获过程中搜索的PRN号,纵轴表示归一化捕获判决因子。由图5(a)可见采用PI方法进行干扰抑制后,由于压制式干扰已经移除,接收机可以捕获到卫星信号。但欺骗式干扰中包含的虚假卫星信号存在于捕获卫星列表中,说明欺骗式干扰仍然存在,并且捕获到的卫星,,,也不能确定为真实卫星。因此,PI方法仅对抑制压制式干扰有效,对抑制欺骗式干扰无效。由图5(b)可见采用LD-PI方法进行干扰抑制后,捕获列表中已经不包含虚假卫星信号,捕获到的卫星星号与真实卫星相同,说明LD-PI方法可以同时抑制压制式干扰和欺骗式干扰。由图5(c)可见采用本文方法进行干扰抑制后,方向的波束输出可以很好地捕获卫星。
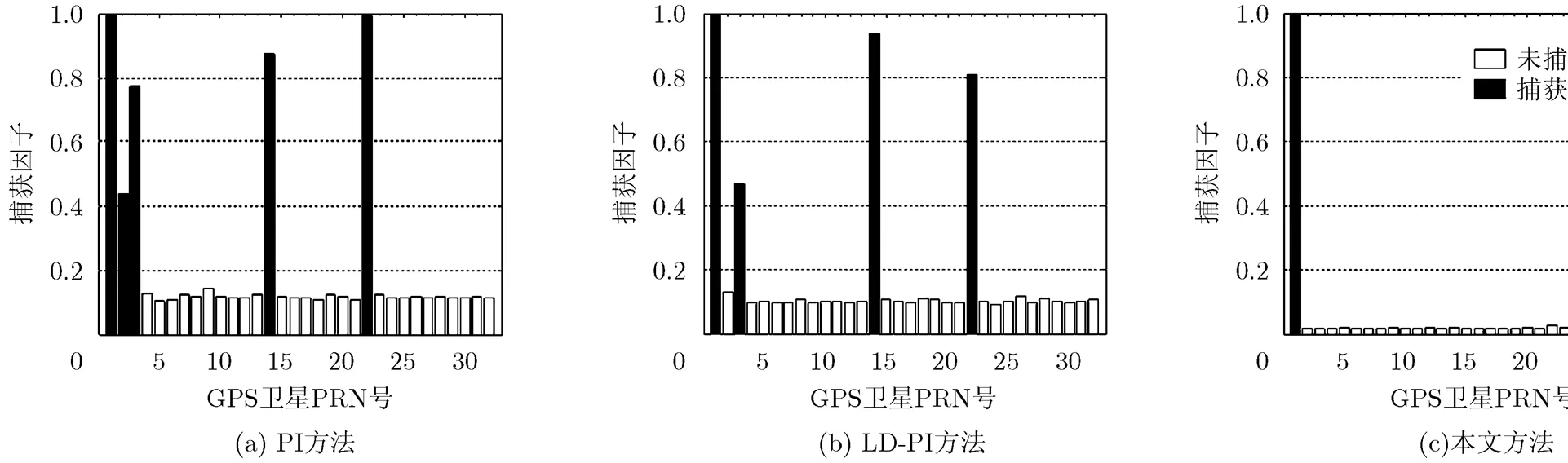
图5 不同方法抗干扰处理后捕获结果比较
为验证图5(b),图5(c)中捕获到的卫星全部为真实卫星而非欺骗式干扰,图6给出了不同方法抗干扰处理后对捕获时2维搜索空间上的相关累加值,其中,图6(a)对应PI方法,图6(b)对应LD-PI方法,图6(c)对应本文方法。可以看到,图6(a)中含有两个明显的峰值,一个属于真实卫星信号,另一个属于欺骗式干扰,这说明虽然PI方法对欺骗式干扰信号有所衰减,但不足以将其完全抑制。图6(b)和图6(c)中均只有一个明显的峰值,这说明LD-PI方法和本文方法均能很好地抑制欺骗式干扰,使接收机捕获到真实卫星信号。进一步比较3幅图的最高峰值可见,图6(a)和图6(b)的数量级相同,但图6(b)的数值较小,这说明LD-PI方法对真实卫星信号的衰减较PI方法更严重;而图6(c)中的最高峰值较图6(a)和图6(b)高一个数量级,这说明所提方法为真实卫星信号提供了处理增益。
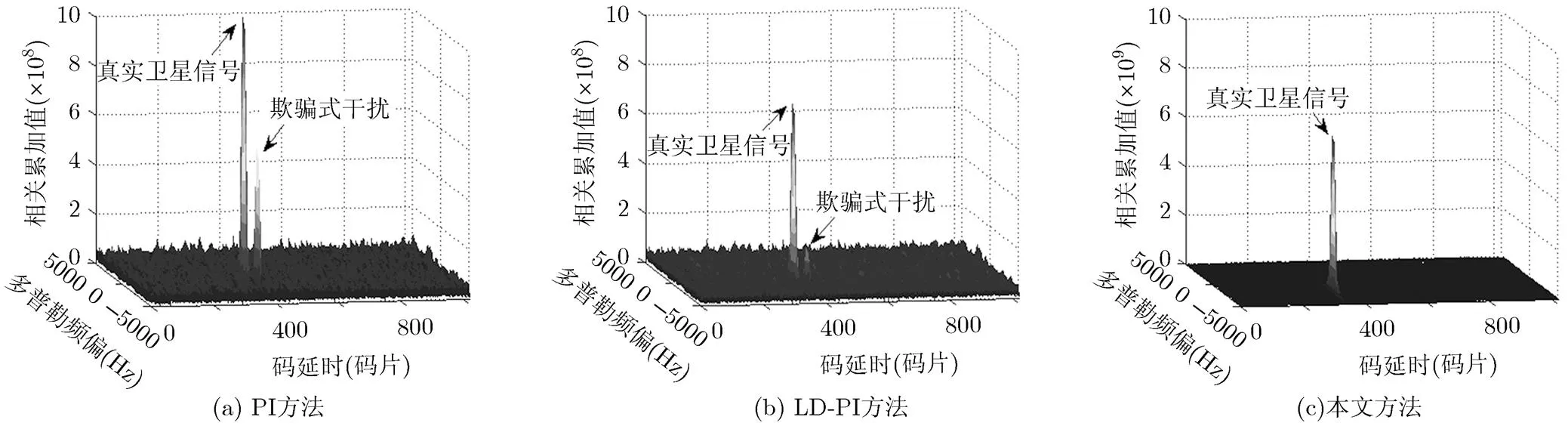
图6 不同方法抗干扰处理后对PRN1捕获2维搜索图比较
图7给出了不同输入信噪比的条件下不同方法抗干扰处理后输出信干噪比的情况,蒙特卡罗实验次数为100次,其中,“o”表示PI方法,“x”表示LD-PI方法,“□”表示所提方法。可以看到,各方法的输出SINR均随着输入SNR的提高而增大;对于同样的输入SNR,由于衰减了真实卫星信号,LD-PI方法的输出SINR最小,PI方法可以得到略低于输入SNR的输出SINR,而所提方法的输出SINR要高出近。比较3种方法可知,3种方法均为不需要阵列流形信息和卫星来向信息的盲处理方法,其中,PI方法仅能抑制较强的压制式干扰不能同时抑制欺骗式干扰,LD-PI方法能够同时抑制两种干扰但会导致真实卫星信号衰减,进而降低了输出SINR,所提方法在抑制两种干扰的同时可以使真实卫星信号输出最大化。
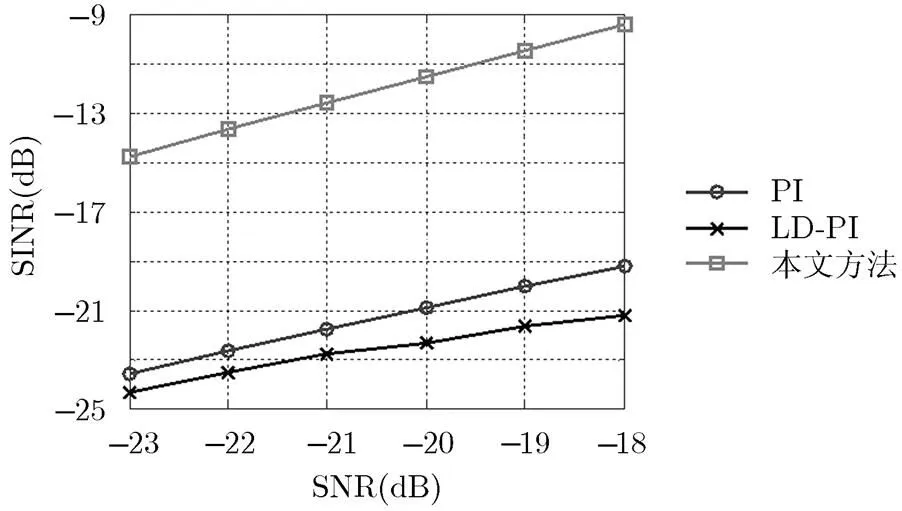
图7 不同方法输出信干噪比比较
表1给出了PI方法、LD-PI方法和本文方法运算量的比较,其中表示阵元数,表示估计式中接收信号协方差矩阵使用的快拍数,是解扩重扩算法使用数据块的长度(通常为1 ms数据)。表中本文方法的运算量为利用所提方法求取式(15)中对准某颗卫星的波束加权矢量时的复乘加次数,且不含解扩处理对应的捕获过程的运算量,这是因为其它两种方法的波束输出也需要进行捕获,这部分相同的运算量不计入。可以看到,PI方法和LD-PI方法运算量相当,而本文方法比PI方法的复乘加次数多,由于通常,因此,解扩重扩算法使用数据块的长度较大是本文方法的运算量远高于其它两种方法的原因。当将仿真实验中对应的参数,即,代入时,PI方法、LD-PI方法和本文方法的复乘加次数分别为,,。

表1 3 种算法计算复杂度分析
5 结束语
本文提出了一种能够同时抑制GNSS压制式干扰和欺骗式干扰的方法,首先将阵列天线接收的信号向压制式干扰的正交子空间投影,从而将压制式干扰移除;然后根据解扩重扩加权矢量间的相关性检测出欺骗式干扰,并得到欺骗式干扰的正交子空间,将其抑制;最后对真实卫星信号再次使用解扩重扩技术进行自适应多波束形成,使每个波束分别对准真实卫星。本文方法可以同时抑制压制式干扰和欺骗式干扰,并对真实卫星信号提供处理增益。该方法不需要卫星来向和阵列流形信息。
[1] NORHISYAN I A, MOHD S A, ABDUL H J R,. Effect of radio frequency interference (RFI) on the Global Positioning System (GPS) signals[C]. IEEE 9th International Colloquium on Signal Processing and its Applications (CSPA), Kuala Lumpur, Malaysia, 2013: 199-204, doi: 10.1109/CSPA.2013. 6530041.
[2] 赵新曙, 王前. 压制式干扰对GNSS接收机的影响及应对策略[J]. 全球定位系统, 2014, 39(6): 47-51.
ZHAO Xinshu and WANG Qian. The effect and solving strategy on GNSS receiver by suppressing interface[J]., 2014, 39(6): 47-51.
[3] CHIEN Yingren. Design of GPS anti-jamming systems using adaptive notch filters[J]., 2015, 9(2): 451-460, doi: 10.1109/JSYST.2013.2283753.
[4] PAUL C, BRIAN H, Thomas H,. A single-chip narrow- band frequency-domain excisor for a Global Positioning System (GPS) receiver[J].-, 2000, 35(3): 51-55. doi: 10.1109/4.826823.
[5] MOSAVI M R, PASHAIAN M, REZAEI M J,. Jamming mitigation in global positioning system receivers using wavelet packet coefficients thresholding[J]., 2015, 9(5): 457-464, doi: 10.1049/iet-spr.2014. 0280.
[6] JAY S. Interference mitigation approaches for the global positioning system[J]., 2003, 14(2): 168-180.
[7] 郭艺. GPS接收机空时抗干扰理论与实现关键技术研究[D]. [博士论文], 国防科技大学, 2007.
GUO Yi. Research on the theory and key realization technologies of space-time interference suppression for GPS receiver[D]. [Ph.D. dissertation], National University of Defense Technology, 2007.
[8] 张伯华, 马红光, 孙新利, 等. 基于正交约束的导航接收机空时自适应方法[J]. 电子与信息学报, 2015, 37(4): 900-906. doi: 10.11999/JEIT140740.
ZHANG Bohua, MA Hongguang, SUN Xinli,Space time adaptive processing technique based on orthogonal constraint in navigation receiver[J].&, 2015, 37(4): 900-906. doi: 10.11999/ JEIT140740.
[9] ZOLTOWSKI M and GECAN A. Advanced adaptive null steering concepts for GPS[C]. Military Communications Conference, San Diego, CA, USA, 1995: 1214-1218. doi: 10.1109/MILCOM.1995.483688.
[10] SUN Wei and MOENESS A. A self-coherence anti-jamming GPS receiver[J]., 2005, 53(10): 3910-3915. doi: 10.1109/TSP.2005.855428.
[11] LU Dan, WU Renbiao, and LIU Haitao. Global positioning system anti-jamming algorithm based on period repetitive CLEAN[J].,&, 2013, 7(2): 164-169. doi: 10.1049/iet-rsn.2010.0353.
[12] LI Qiang, WANG Wei, XU Dingjie,. A robust anti- jamming navigation receiver with antenna array and GPS/SINS[J]., 2014, 18(3): 467-470. doi: 10.1109/LCOMM.2014.012314.132451.
[13] JAFARNIA-JAHROMI A, BROUMANDAN A, NIELSEN J,GPS vulnerability to spoofing threats and a review of antispoofing techniques[J]., 2012, 2012(9): 1-16. doi: Article ID: 127072.
[14] 耿正霖, 聂俊伟, 王飞雪. GNSS抗欺骗干扰技术研究[J]. 全球定位系统, 2013, 38(4): 65-70. doi: 10.3969/j.issn.1008-9268. 2013.04.016.
GENG Zhenglin, NIE Junwei, and WANG Feixue. Study of GNSS anti-spoofing techniques[J]., 2013, 38(4): 65-70. doi: 10.3969/j.issn.1008-9268.2013.04.016.
[15] TODD H, BRENT L, MARK P,. Assessing the spoofing threat: Revelopment of a portable GPS civilian spoofer[C]. The Institute of Navigation, Savannah, GA, USA, 2008: 2314-2325.
[16] BRENT L, WILLIAM B, BRYAN G,. An in-line anti-spoofing device for legacy civil GPS receivers[C]. The Institute of Navigation, San Diego, CA, USA, 2010: 698-712.
[17] SAEED D, JAFARNIA-JAHROMI A, BROUMANDAN A,. A low-complexity GNSS spoofing mitigation technique using a double antenna array[J]., 2011, 22(12): 44-46.
[18] SAEED D, JAFARNIA-JAHROMI A, BROUMANDAN A,. A low- complexity GPS anti-spoofing method using a multi-antenna array[C]. The Institute of Navigation, Nashville, TN, USA, 2012: 1233-1243.
[19] SAEED D, JAFARNIA-JAHROMI A, BROUMANDAN A,. GNSS structural interference mitigation technique using antenna array processing[C]. 2014 IEEE 8th SensorArray and Multichannel Signal Processing Workshop (SAM), 2014: 109-112.
[20] ZHANG Yaotian, WANG Lu, WANG Wenyi,. Spoofing jamming suppression techniques for GPS based on DOA estimating[C]. China Satellite Navigation Conference, Nanjing, China, 2014: 683-694.
[21] 史文森, 朱海, 蔡鹏. 基于接收信号DOA估计的GPS欺骗式干扰信号识别技术[J]. 舰船科学技术, 2013, 35(4): 111-116. doi: 10.3404/j.issn.1672-7649.2013.04.026.
SHI Wensen, ZHU Hai, and CAI Peng. The GPS deception interference identification technology of based on the DOA of received signal[J].&, 2013, 35(4): 111-116. doi: 10.3404/j.issn.1672-7649.2013.04.026.
[22] DANIEL S, JAHSHAN B, and TODD H. Evaluation of smart grid and civilian UAV vulnerability to GPS spoofing attacks [C]. Institute of Navigation, Nashville, TN, USA, 2012: 1-15.
[23] BAO Lina, WU Renbiao, LU Dan,A novel adaptive anti-interference algorithm based on negative diagonal loading for spoofing and jamming in global navigation satellite system[J]., 2015, 61(2): 157-164. doi: 10.1134/ S1064226916020017.
[24] 包莉娜, 吴仁彪, 王文益, 等. 两级结构的卫星导航压制式和欺骗式干扰联合抑制算法[J]. 信号处理, 2015, 31(9): 1041-1046. doi: 10.3969/j.issn.1003-0530.2015.09.001.
BAO Lina, WU Renbiao, WANG Wenyi,. Two-step GPS interference suppression algorithm for spoofing and jamming[J]., 2015, 31(9): 1041-1046. doi: 10.3969/j.issn.1003-0530.2015.09.001.
[25] RONG Z. Simulations of adaptive array algorithm for CDMA system[D]. [Master dissertation], Blacksburg, VA, USA, Virginia Technology, 1996.
[26] ALEX G, ULRICH N, and JOHANN B. Adaptive beamforming algorithms with robustness against jammer motion[J]., 1997, 45(7): 1878-1885. doi: 10.1109/78.599965.
Joint GNSS Interference Mitigation Approach for Jamming and Spoofing Based on Multi-antenna Array
WANG Lu WU Renbiao WANG Wenyi LU Dan JIA Qiongqiong
(Tianjin Key Laboratary for Advanced Signal Processing, Civil Aviation University of China, Tianjin 300300, China)
Jamming and spoofing are the most common and serious threat intentional interferences for Global Navigation Satellite System (GNSS). A joint GNSS interference mitigation approach is proposed for jamming and spoofing issue based on multi-antenna array in this paper. Firstly, jamming is suppressed by the subspace technology. Then, spoofing is detected and mitigated by using the weighting vectors obtained by the despread- respread method. Finally, for maximizing the output of each authentic signal, the despread-respread method is reutilized to form multiple beams pointing at each of the authentic satellites. Simulation results show that the proposed algorithm can null jamming and spoofing simultaneously. The interference suppression performance of this method is not sensitive to the array manifold errors and not limited by the prior knowledge of satellites’ directions.
Global Navigation Satellite System (GNSS); Jamming; Spoofing; Subspace; Despread-respread
TN967.1
A
1009-5896(2016)09-2344-07
10.11999/JEIT151295
2015-11-23;
2016-05-05;
2016-06-24
国家自然科学基金(61471363, U1333106),中央高校基本科研业务费项目(3122016D004)
The National Natural Science Foundation of China (61471363, U1333106), The Fundamental Research Funds for the Central Universites (3122016D004)
:吴仁彪 rbwu@cauc.edu.cn
王 璐: 女,1984年生,讲师,主要研究方向为卫星导航抗干扰、阵列信号处理.
吴仁彪: 男,1966年生,教授,博士生导师,主要研究方向为自适应阵列信号处理、民航无线电干扰检测与自适应抑制、高分辨率雷达成像与自动目标识别等.
王文益: 男,1980年生,教授,主要研究方向为自适应阵列信号处理.
卢 丹: 女,1978年生,副教授,主要研究方向为卫星导航抗干扰.
贾琼琼: 女,1986年生,讲师,主要研究方向为卫星导航抗干扰.