基于双2D激光位移传感器的空间运动物体位置探测
2016-10-14玄柳何庆徐华于存贵
玄柳,何庆,徐华,于存贵
(1.南京理工大学江苏南京210094;2.上海宇航系统工程研究所上海201108)
基于双2D激光位移传感器的空间运动物体位置探测
玄柳1,何庆2,徐华2,于存贵1
(1.南京理工大学江苏南京210094;2.上海宇航系统工程研究所上海201108)
要获得空间运动物体的位置,需要实时探测被测物体特征点在空间中的三维坐标信息,为了解决这一问题,提出了基于双2D激光位移传感器的空间运动物体探测系统。首先,对2D激光位移传感器进行了简单的介绍,包括2D激光位移传感器的工作原理及传感器的选型;其次,详细介绍了双2D激光位移传感器三维定位方案,包括方案的选择及方案的实现原理;最后,通过被测物体横、纵坐标探测模拟实验,以及轴、纵坐标探测模拟实验两个实验,验证了方案的可行性。实验证明基于双2D激光位移传感器的空间运动物体位置信息探测系统不会受被测物体的圆弧面的影响,且探测精度高、无需通过复杂的信息处理,采样频率最高可达10K,有利于提高信号探测的实时性。
信号探测;2D激光位移传感器;凸起标志;实时性
当物体在空间中运动时,要实时探测被测物体在空间中的三维坐标信息,目前方法有很多,比如利用摄像机通过对图像处理进行特征点的定位[1]。但是,若使用两个摄像头组成双目立体视觉探测系统,就必须要对两个摄像头都进行标定,增加了系统的复杂度,影响结果的准确性[2]。如果使用单目视觉进行信号探测,则会增加图像处理算法的复杂性,延长处理时间。同时使用机器视觉要进行大量的图像处理,使得系统的采样频率降低,影响探测的实时性。另外,由于被测物体为不规则形状,当物体表面为弧面时易对摄像头视觉定位造成干扰,产生较大的误差[3]。
鉴于此提出了一种基于双2D激光位移传感器的空间运动物体位置探测方法,不需要进行复杂的信息处理,不受物体形状影响,定位精度高,实时性好。2D激光位移传感器可以测量金属、陶瓷、木材、塑料等材料的表面,具有测量范围宽、测量精度高、抗干扰性强等特点。
1 探测系统设计
1.12D激光位移传感器工作原理
2D激光位移传感器可以用来测量被测物体表面任一点的二维坐标信息,由激光发生器、透镜、镜片、二维数组器、信号处理器、外壳等组成,其工作原理
基于光学三角测量法[4],工作原理示意如图1所示。
2D激光位移传感器工作原理:半导体激光发生器作为光源,其发射出的激光通过透镜后形成激光扇面,激光扇面与被测物体相交形成轮廓线,被测物体将激光反射到镜片上,镜片将所收集的反射光投影到二维数组器上,信号处理器通过分析处理二维数组器上的图形信号就可获得被测物体轮廓线上任一点的纵向深度信息以及距激光扇面中心线的横向信息[5]。
2D激光位移传感器所发射出的激光扇面与被测物体相交产生一条交线,该激光交线由若干激光数据点组成[6]。2D激光位移传感器可测出被测物体在激光交线上的任一特征点到传感器的纵向距离y,以及到视场中心线的横向距离x。通过一个2D激光位移传感器可以获得被测物体上特征点的二维坐标,那么利用两个2D激光位移传感器就可以获得特征点的三维坐标[7]。
1.2系统方案设计
在被测物体上放置水平、竖直两个凸起标志,通过两个2D激光位移传感器检测两个凸起标志的二维信息(横向与纵向、轴向与纵向)就可以实现物体在空间坐标系中的三维定位。基于双2D激光位移传感器的运动物体空间位置探测系统的主要构成如图2所示。
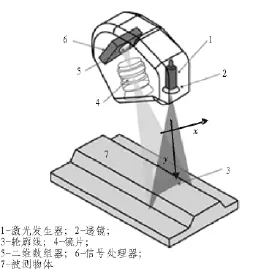
图1 2D激光位移传感器工作原理示意图
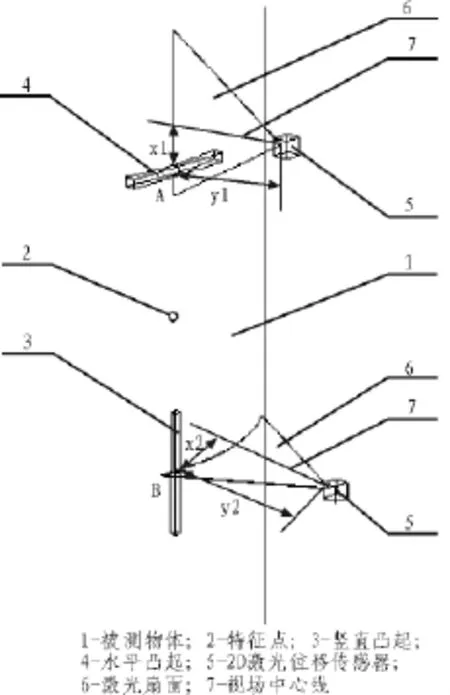
图2 探测系统构成示意图
要探测的特征点位于被测物体的表面上,在被测物体的表面有两个凸起标志,其中一个凸起标志呈竖直方向,为竖直凸起标志,另一个凸起标志呈水平方向,为水平凸起标志,两凸起标志相互垂直,且竖直凸起标志的延长线穿过特征点。在两凸起标志相对应的位置分别设置有两个位置固定的2D激光位移传感器。
初始状态下,两2D激光位移传感器的激光扇面垂直于相应的凸起标志,视场中心线穿过相应的凸起标志。两2D激光位移传感器与相应的凸起标志的安装距离为d,且两2D激光位移传感器的连线平行于竖直凸起标志。
被测物体沿3个方向平动,其运动范围在2D激光位移传感器的探测范围内,并保证被测物体在运动过程中,两凸起标志与相应的2D激光位移传感器的激光扇面存在交点[8-9]。
在被测物体的运动过程中,水平凸起标志与相对应的2D激光位移传感器的激光扇面交点为A,A到视场中心线的距离为x1(轴向),A到2D激光位移传感器的距离为y1(纵向);竖直凸起标志与相对应的2D激光位移传感器的激光扇面交点为B,B到视场中心线的距离为x2(横向),B到2D激光位移传感器的距离为y2(纵向)。
设初始状态下,被测物体的特征点的空间坐标为(0,0,0),则被测物体在运动过程中,其特征点的空间坐标为(x1,(y1+y2)/2-d,x2)。这样通过两个2D激光位移传感器即可获得空间运动物体的位置信息。
2 实验及分析
本实验所用信号探测系统的传感器为上海思信科学仪器公司的2D激光位移传感器,其型号为GOCATOR 2350,其实物如图3所示。
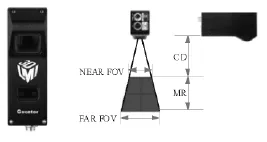
图3 2D激光位移传感器实物图
2D激光位移传感器参数如表1所示。
2D激光位移传感器的MR为沿y方向的测量范围,FOV为沿x方向的测量范围,CD为安装净距离。2D激光位移传感器与被测物体之间的安装距离要考虑CD的影响[10]。
2.1实验环境
在双2D激光位移传感器三维定位实验中,2D激光位移传感器实时探测被测物体两个凸起标志在传感器坐标系中的二维坐标信息,然后将探测到的坐标信息反馈给上位机,通过上位机软件实时显示被测物体凸起标志的二维坐标信息。实验过程中所使用的实验器材包括被测物体、2D激光位移传感器、同步触发器、上位机及软件[11]。
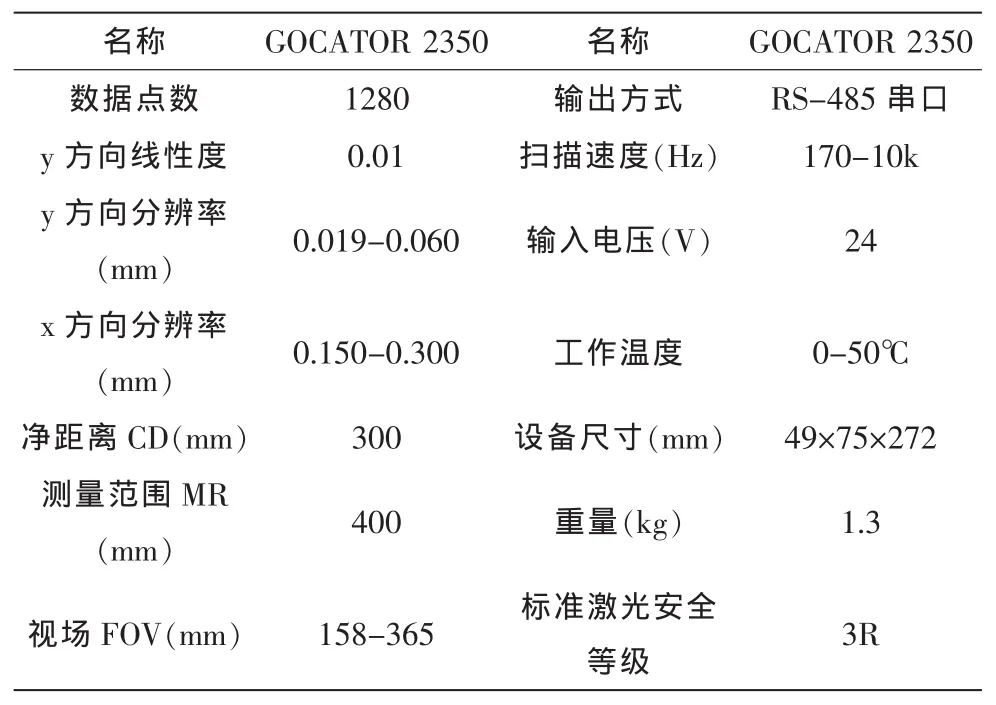
表1 2D激光位移传感器参数表
本实验中将被测物体定为一平面靶板,在该靶板上放置两个凸起标志,两个凸起标志方向分别呈水平方向、竖直方向,水平凸起标志长为260 mm、竖直凸起标志长为150 mm,凸起标志宽3 mm、高3 mm,凸起标志选用反光性强的材料,被测物体如图4所示,通过推动被测物体沿三个轴向的运动模拟空间物体的运动。在实验过程中,必须保证凸起一直在2D激光位移传感器的测量范围内。
实验过程中,2D激光位移传感器激光线与被测物体凸起标志始终相交于一点,由2D激光位移传感器测得此凸起点在传感器坐标系中的二维坐标信息。

图4 被测物体模拟图
由于通过两2D激光位移传感器分别获取的两凸起标志二维坐标信息解算得到运动物体在空间坐标系中的三维坐标信息,因此,必须保证两个2D激光位移传感器在同一时刻的信息同步[12]。鉴于此,使用同步触发器来使两个2D激光位移传感器同时触发,从而保证所探测的两凸起标志的坐标信息同步。同步触发器[13]的实物如图5所示。
2D激光位移传感器所获得的坐标信息在上位机软件界面里呈现,如图6所示,图中曲线凸起点为2D激光位移传感器激光线与被测物体凸起标志交点,其横坐标为2D激光位移传感器激光线与被测物体凸起标志交点到2D激光位移传感器视场中心线的距离,其纵坐标为2D激光位移传感器激光线与被测物体凸起标志交点到2D激光位移传感器的距离[14]。本实验初始状态下,2D激光位移传感器与被测物体之间的安装距离为500 mm,被测物体上两凸起标志均在2D激光位移传感器视场中心线上,通过配置上位机软件,将纵坐标值减去500 mm后进行二维曲线显示,此时,曲线凸起点在传感器坐标系原点处。随着被测物体的运动,曲线凸起点在传感器坐标系中作相应变化。

图5 同步触发器实物图
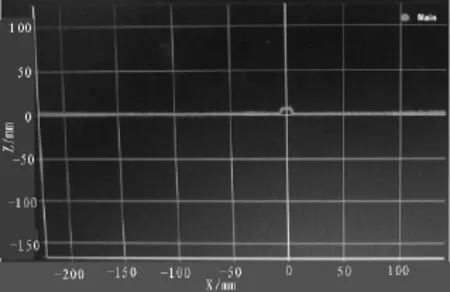
图6 上位机软件界面图
2.2实验内容
1)被测物体横、纵坐标探测模拟实验(左右、前后方向)
通过2D激光位移传感器探测竖直凸起标志可以定位被测物体在空间坐标系中的横、纵坐标[15],其探测模拟实验如图7所示。
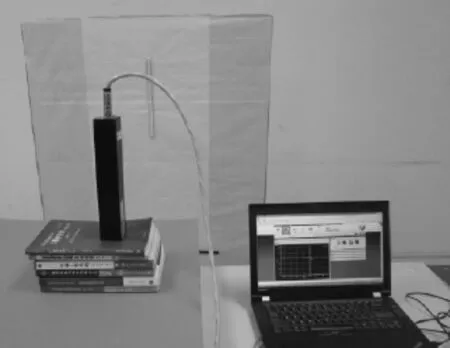
图7 被测物体横、纵坐标探测模拟实验图
曲线凸起点横坐标值为被测物体在空间坐标系中的横坐标值,曲线凸起点纵坐标值为被测物体在空间坐标系中的纵坐标值。初始状态下,曲线凸起点在坐标系的原点处,代表被测物体特征点在空间坐标系中横向、纵向的位移量均为零;当推动被测物体沿横向运动时,曲线凸起点横坐标会产生相应变化,而纵坐标不变;当推动被测物体沿纵向运动时,曲线凸起点纵坐标会产生相应变化,而横坐标不变;当推动被测物体轴向运动时,曲线凸起点横、纵坐标均不变。
2)被测物体轴、纵坐标探测模拟实验(上下、前后方向)
通过2D激光位移传感器探测被测物体水平凸起标志可以定位被测物体在空间坐标系中的轴、纵坐标,其探测模拟实验如图8所示。

图8 被测物体轴、纵坐标探测模拟实验图
曲线凸起点横坐标值为被测物体在空间坐标系中的轴坐标值,曲线凸起点纵坐标值为被测物体在空间坐标系中的纵坐标值。初始状态下,曲线凸起点在坐标系的原点处,代表被测物体在空间坐标系中轴向、纵向的位移量均为零;当推动被测物体沿轴向运动时,曲线凸起点横坐标会产生相应变化,而纵坐标不变;当推动被测物体沿纵向运动时,曲线凸起点纵坐标会产生相应变化,而横坐标不变;当推动被测物体沿横向运动时,曲线凸起点轴、纵坐标均不变。
2.3实验结果
被测物体横、纵坐标探测模拟实验和轴、纵坐标探测模拟实验两个实验验证了双2D激光位移传感器三维定位方案的可行性。同时验证了被测物体分别沿横向(左右)、纵向(前后)、轴向(上下)单独运动时,2D激光位移传感器探测的其余两个方向的坐标无变化,即物体沿一个方向运动时对其余两个方向坐标的探测无影响,证明了该方案的准确性。
3 结论
针对空间运动物体位置探测问题,本文提出了基于双2D激光位移传感器的空间运动物体位置探测方案。该方案通过两个2D激光位移传感器获得被测物体上特征点的三维坐标,检测精度高,采样频率快,且避免了复杂的图像处理和分析运算,有利于提高跟踪的实时性。
[1]胡寿松.自动控制原理[M].北京:科学出版社,2001.
[2]齐贤伟.运载火箭自动对接脱落连接器随动技术研究[D].南京:南京理工大学,2014.
[3]彭刚,黄心汉,王敏,等.基于视觉引导和超声测距的运动目标跟踪和抓取[J].高技术通讯,2002(6):74-78.
[4]李兰君,喻寿益.单点激光三角法测距及其标定[J].研究与开发,2003(10):49-51.
[5]林向东.激光二维传感器测量直线度方法的研究[D].北京:北京交通大学,2011.
[6]刘薇娜,谢国红.基于CCD的激光三角位移法测液位的性能研究[J].自动化仪表,2010(7):19-21.
[7]孙兴.DSP在机器人视觉系统的应用与研究[D].贵阳:贵州大学,2006.
[8]曲兴华.基于激光测距的大尺寸测量应用研究[J].仪器仪表学报,2009(3):482-485.
[9]张海峰.单向激光测距及其测量实验[J].中国激光,2013(3):1-7.
[10]Shanghai Sixin Scientific Instruments Co.,Ltd[M].Laser Displacement Sensor.2012
[11]于存贵,玄柳.运动物体空间坐标信息探测方法.中国,201510063280.5[P],2015
[12]程鹏飞.大动态范围高精度激光测距关键技术研究[D].上海:中国科学院上海技术物理研究所,2014.
[13]Alan Littlefield.Umbilical Design[J].Produced by the NASA Center for Aerospace Information(CASI),2007.
[14]郭鸿祥.准直测量中风摆跟踪技术的研究[D].陕西:中国科学院西安光学精密机械研究所,2013.
[15]李宗涛.自动对接连接器探测跟踪技术研究[D].南京:南京理工大学,2015.
Position detection of spatial motion objects based on double 2D laser displacement sensor
XUAN Liu1,HE Qing2,XU Hua2,YU Cun-gui1
(1.Nanjing University of Science and Technology,Nanjing 210094,China;2.Shanghai Institute of Astronautical Systems Engineering,Shanghai 201108,China)
To gain the position of spatial motion objects,it is needed to detect the three-dimensional coordinate of measured object feature points constantly.So there is a spatial motion objects detected system based on double 2D laser displacement sensor.First of all,there is an introduction about double 2D laser displacement sensor,including double 2D laser displacement sensor's principle and sensor type.Secondly,introducing the project based on double 2D laser displacement sensor and axial and vertical coordinates detection simulate experiments to prove the project is available.Experiments prove that the spatial motion objects detected system based on double 2D laser displacement sensor is not influenced by measured object's cambered surface.It has high detection precision and doesn't deal with flexible informations.The sample frequency is 10k highly.All these are better to raise signal detection's instantaneity.
signal detection;2D laser displacement sensor;salient sign;instantaneity
TN91
A
1674-6236(2016)12-0060-04
2016-01-05稿件编号:201601023
上海航天科技创新基金(SAST201410)
玄柳(1990—),女,山东泰安人,硕士研究生。研究方向:智能探测与控制技术。
