自扶正四刃剪切工具设计
2016-10-13林朝阳陈海彬孙振忠何楚亮刘宇
林朝阳 陈海彬 孙振忠 何楚亮 刘宇
(1.东莞理工学院 机械工程学院,广东东莞 523808;2.中国科学院 高能物理研究所,北京 100000)
自扶正四刃剪切工具设计
林朝阳1陈海彬1孙振忠1何楚亮1刘宇2
(1.东莞理工学院机械工程学院,广东东莞523808;2.中国科学院高能物理研究所,北京100000)
遥控维护技术和装备在核物理装置中得到广泛的研究和应用,目前已成为核物理装置中放射性部件维护不可缺少的重要手段。多层冷却管道是核物理装备重要基础设施,一般采用的多层结构,这种结构在增强管道性能的同时,也增加遥控维护条件下管道剪切的难度,对剪切工具性能也提出较高的要求。结合实际遥控维护工作中遇到的问题,改进刀刃,增加副刀刃,以克服上下刀刃间隙产生的扭转扭矩。由于老化和辐照损伤对性能的影响,管道需要进行定期的检查和更换,开展液压剪切工具的设计工作显得非常有必要。
自扶正;遥控维护;剪切刀刃;设计
遥控维护技术和装备在核物理装置中得到广泛的研究和应用:美国橡树岭国家实验室在早期就对核聚变装置的远程操作设备进行了长期的研究[1]:1989年对CIT托卡马克装置的远程维护设备进行了概念设计;2003年对在FIRE核聚变实验装置实验过程中用于维护和校正的远程操作设备进行了概念研究和设计,研究了在远程操作设备与真空室对接时放射和污染的控制方法,采用自动运装车将被维护部件运送到热室进行维修或废弃。
国际热核聚变实验堆ITER计划支持了一批遥操作机器人的研究与应用:Takeda等[2]为ITER项目中的远程维护系统设计了三种运行于真空室和热室之间并能在核辐射条件下工作的遥操作机器人CCC、SCC和RCC,分别用于运送不同的组件;Takeo等[3]研制的ITER项目中的毯式舱替换机器人,能够实现对4吨毯式舱模块的更换;Laurent等[4]为ITER项目中的设备检测任务设计了遥操作机械臂,该机械臂由5段组成,具有8个自由度,最大负载10 kg,工作范围达到8 m;Teradaa等[5]开发了核部件的安放机器人,该机器人能够完成精度好于25 mm的安放操作;LUK等[6]为核电站设计了四种遥控操作的爬行运动机器人,这些机器人能够支持核工业的设备检测与维护;Pezhman等[7]针对著名的热室维护机器人Telbot的控制器进行改进,设计了ANFIS控制器。
遥控维护是设备维护人员在远离维护现场的安全区域,通过采用机械手(人)或专门的设备在核装置的内部开展设备监测和维护工作,以降低工作人员受照剂量和劳动强度。目前,遥控维护技术已成为核物理装置中放射性部件维护不可缺少的重要手段[8-9]。
冷却管道是核物理装置的重要基础设施,核物理装置都配有使用液氦或液氢(一般为5 K~20 K)等超低温多层冷却介质的冷却系统,以减少粒子反应过程中产生的大量热量。冷却管道一般采用的多层结构,这种结构在增强管道性能的同时,也增加遥控维护条件下管道剪切的难度,对剪切工具的性能也具有较高的要求[10]。考虑到老化和辐照损伤对性能的影响,管道需要进行定期的检查和更换,开展液压剪切工具的设计工作显得非常有必要。
1 设计
冷却管道的材料通常选用316不锈钢,内部为多层结构,管道内部含两条冷却介质管,内层为真空绝热层,外层为检漏气体层,所有介质管道厚度均相等。
为了确保液压剪刀能顺利剪断需要更换的冷却管道,刀刃需有适应管道的强度和韧性,故以冷却管道为主要设计依据确定液压剪刀需要的剪切力以及刀刃参数。
1.1刀刃剪切力计算
该不锈钢不可通过淬火改变其硬度,故属于塑性材料,其抗拉强度(抗拉极限) 为σb ≥520 MPa,对于金属可按如下的经验公式确定抗剪强度(剪切应力极限),
即:剪切应力极限 =(0.6-0.8)*抗拉极限=312 MPa-416 MPa
剪切面积约0.001 344 m2,最大剪切面积A可按剪切面积0.5~0.6倍计算,
即:A=0.6*剪切面积=0.000 806 4 m2
其中,在剪切阶段需要消耗切力,而撕裂阶段则不消耗。于是在遥控维护中,要把冷却管道剪断,所需剪力F刃为,
即:F刃=最大剪切面积A×剪切应力极限=335 462.4 N。
由计算可知刀刃至少提供335 KN的力才能完成冷却管道的剪断,以保证对管道进行遥控维护部分能被顺利更换。
1.2刀刃结构设计
刀刃的结构的设计剪切性能及使用寿命,若刀刃锋利,则剪切效率高,管道的剪切效果好,但刀刃容易变钝,寿命短,如果刀刃设计得钝,则使用寿命长,剪切效率低,管道的剪切效果差。
就使用环境而言,遥控维护中对于冷却管道更换并不频繁,刀刃的使用相对较少,冷却管道对刀刃的磨钝量并不多,而冷却管道内部为多层结构,这种结构无疑会增加剪切难度,对剪切口的剪切效果要求较高,所以刀刃结构应该被设计得相对锋利。
综上所述,将刀刃设计为三牙口形状(易于咬住管道),并取刀刃倒角为45°,如图1所示。
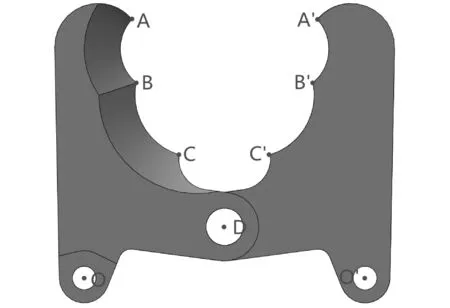
图1 刀刃结构图
为了确保液压剪刀刃能够顺利将冷却管道剪断,刀刃剪切力作用区域应大于冷却管道直径,取刀刃剪切作用点A、C间距离为115 mm。
两刀刃剪切力主要作用点间最大距离BB’可达141.75 mm,大于冷却管道外径,满足要求。其中点O、O’处为刀刃与支杆连接处,点D处连接刀刃把,OD=OD’= 120 mm,0B=OB’= 160 mm,∠BOD =∠B’O’D=55°,圆弧AB及A’B’半径为35 mm,圆弧BC及B’C’半径为50 mm。
在剪切过程中,点B及点B’首先接触管道外壁并发挥剪切作用,为剪切力的主要作用点,刀刃B点及B’点逐渐压向管道,将管道外壁刺破后由轮框ABC及A’B’C’共同将剪切力作用于管道外壁,从而完成管道的切断。
2 液压缸所需提供的推力
刀刃的剪切力来源于液压缸,由液压缸负责将液压能转化为机械能,通过对刀刃及液压缸的结构运动进行分析,得出两刀刃及液压缸组成的机构运动简图,如图2所示。

图2 液压剪结构运动简图
其中构件1为刀刃连杆,构件2为刀刃,当活塞在液压力作用下往下运动时,带动刀刃把运动,从而使两刀刃向中间压缩,这就是刀刃对进冷却管道进行剪切的过程,在此过程中,连接刀刃的连杆会有轻微的摆动。
在计算刀刃把将力传递到刀刃剪切作用点的过程中,由于连杆长度需要确定液压缸活塞行程以及活塞长度后才能确定,而在剪切过程中支杆的摆动是微小的,于是在误差允许范围内,可将支杆视为静止状态,即将支杆视为机架的一部分,于是点O视作固定点,已知OD=120 mm,0B=160 mm,∠BOD=55°,F刃=335 KN,于是F=390 KN。
由计算可知设计出的液压缸所能提供的推力应该达到390 KN,这样其所能提供的拉力才能达到335 KN,从而保证刀刃能实现管道剪断功能。
3 刀刃的改进
在设计中,两刀刃接触面之间处于理想状态,上下刀刃间不存在间隙,而在现实中,上下两刀刃之间不可能不存在间隙,两接触面之间必定存在微小的间隙。在液压剪系统中,由于液压剪在剪断管道的过程中需要向管道两侧施加极大的剪力,如此巨大的力即使在极其微小的间隙下也会产生极大的力矩,如图3所示。

图3 扭转力矩的产生
在巨大的力矩作用下,管道被切断区域会出现倾斜,管道的倾斜现象极大影响了正常的遥控维护作业,不仅使液压剪刀不能顺利完成管道维护的任务,而且极大的降低刀刃的使用寿命和使用性能。
由于两刀刃之间的微小间隙是机械装配中无法避免的,为了消除管道在遥控维护的过程中发生倾斜,在原刀刃上焊接副刀刃的方式固定冷却管道,如图4所示。

图4 副刀刃
在剪切过程中,当主刀刃刚接触到管道时,副刀刃与管道并无接触,随着两刀刃的逐渐靠拢,主刀刃开始逐步将管道压扁并发生实质性剪切,而这个过程也正是管道发生扭转的过程,在此过程中副刀刃能始终保持与冷管道接触,向管道提供一个与管道扭转方向相反的力,从而保证管道在剪切过程中不发生扭转现象,使刀刃顺利完成冷却管道的遥控维护,如图5所示。
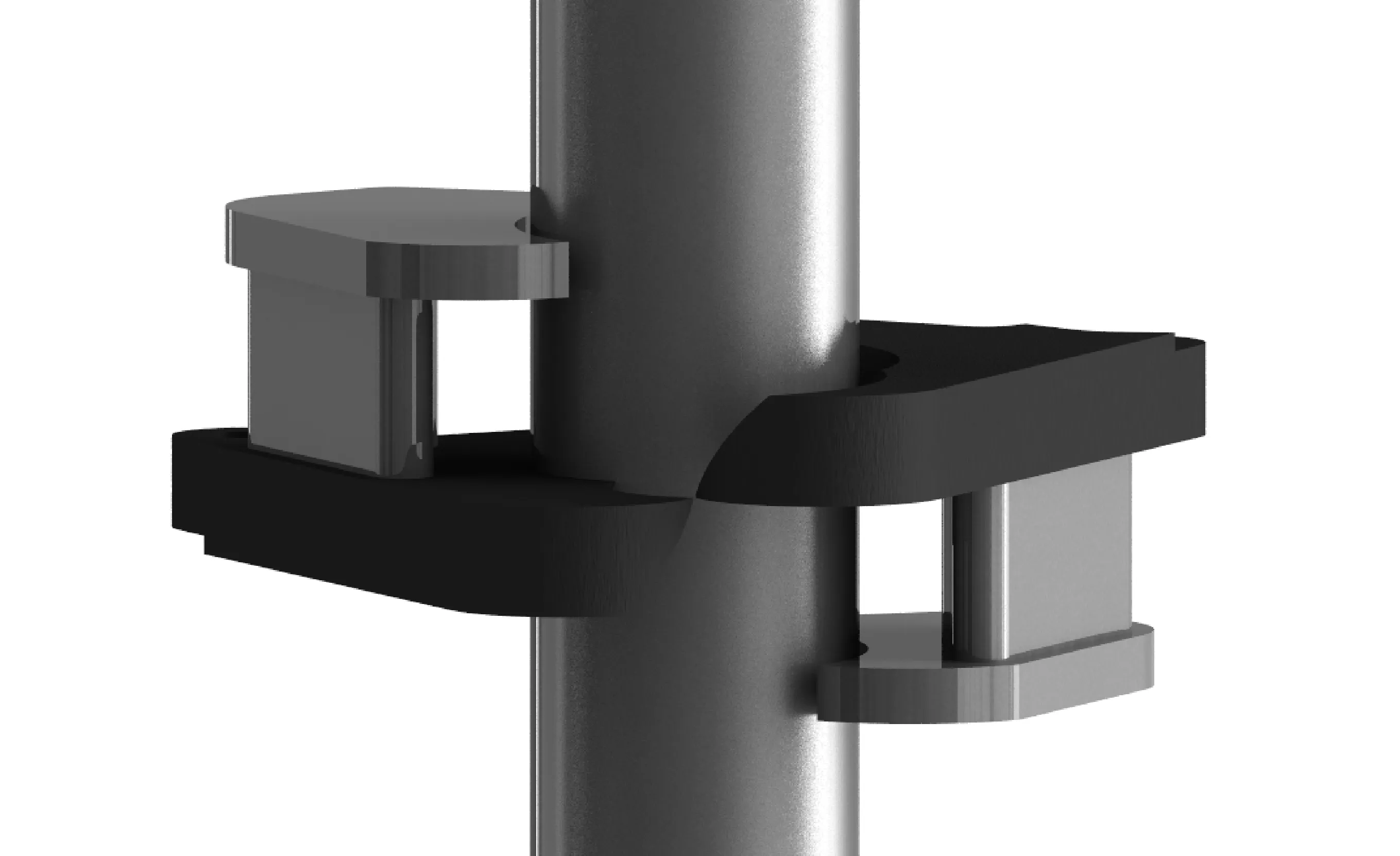
图5 剪切过程
4 结语
1)计算可知刀刃至少提供335 KN的力才能完成冷却管道的剪断,以保证对管道进行遥控维护部分能被顺利更换;
2)就使用环境而言,遥控维护中对于冷却管道更换并不频繁,且管道为多层结构对剪切口的剪切效果要求较高,所以刀刃结构应该被设计得相对锋利;
3)由计算可知设计出的液压缸所能提供的推力应该达到390 KN,这样其所能提供的拉力才能达到335 KN,从而保证刀刃能实现管道剪断功能;
4)改进了刀刃,增加了剪切工具的副刀刃,克服上下刀刃间隙产生的扭转扭矩,使刀刃能顺利将冷却管道进行剪断。
[1]Andres I, Juan A, Pastor, et al.2003.Robots in radioactive environments [J]. IEEE Robotics & Automation Magazine, 2003(12): 12-23.
[2]Takeda M, Akou K. Development of divertor cassette transporters for ITER[J].Fusion Engineering 17th IEEE/NPSS Symposium, 1997(2): 925-928.
[3]Takeo K, Kosuge K, Shibanuma K, et al. Force control of remote maintenance robot for the ITER[C].The 27th Annual Conference of the IEEE Industrial Electronics Society, 2001:450-455.
[4]Laurent G, Pascal B , Vincent B, et al. Development of an ITER relevant inspection robot[J]. Fusion Engineering and Design,2008, 83:1833-1836.
[5]Teradaa S, Kobayashib H, Sengokub H. Design and development of a work robot to place ATLAS SCT modules onto barrel cylinders [J]. Nuclear Instruments and Methods in Physics Research A, 2005, 541(1-2):144-149.
[6]Luk B L, Liu K P, Collie A, et al. Tele-operated climbing and mobile service robots for remote inspection and maintenance in nuclear industry[J]. Industrial Robot: An International Journal, 2006, 33(3): 194-204.
[7]Pezhman L, Saeed S.A novel approach to develop the control of Telbot using ANFIS for nuclear hot cells [J]. Annals of Nuclear Energy, 2011: 38(10):2156-2162.
[8]Bernhard H. Setting up and managing a remote maintenance operation for fusion [J]. Fusion Engineering and Design, 2008, 83(10-12): 1841-1844.
[9]Rolfe A C, Brown P, Carte P, et al. A report on the first remote handling operations at JET [J]. Fusion Engineering and Design, 1999,46(2-4): 299-306.
[10]陈海彬,郭建文,李荣泳,等. 遥控维护条件下冷却管道剪切试验[J].东莞理工学院学报,2013, 20(1):58-63.
Design of Self-centering Four Blade Cutting Tool
LIN Zhaoyang1CHEN Haibin1SUN Zhenzhong1HE Chuliang1LIU Yu2
(1.College of Mechanical Engineering, Dongguan University of Technology, Dongguan 523808, China;2. Institute of High Energy Physics, Chinese Academy of Sciences, Beijing 100000, China)
Remote maintenance handing technology and equipments are researched and applied extensively and thoroughly in nuclear physics equipment, and play an important role in replacement of radioactive components in nuclear physics. In nuclear physics equipment, multilayered cooling pipeline is an important infrastructure which strengthens the performance of the pipeline, increases the difficulty of pipe cutting under the condition of remote maintenance handing and puts forward higher requirements to the cutting tool. Based on the problems from maintenances, two side blades are added in to overcome the torque generated by the gap between the top and the bottom edges. Due to aging and irradiation damage, pipes should be regularly inspected and replaced, and the design of hydraulic cutting tool is quite significant.
self-centering; remote maintenance handing; cutting blade;design
2016-04-08
2014年市社会科技发展项目(2014106101007)。
林朝阳(1983—),男,河南汝南人,主要从事机械加工及遥控维护研究。
TL38+7
A
1009-0312(2016)03-0095-05
