永磁同步电机IF控制策略转矩匹配特性研究
2016-10-13张文斌
张文斌, 黄 华
永磁同步电机IF控制策略转矩匹配特性研究
张文斌1, 黄 华2
(1.武汉川崎船用机械有限公司,武汉430084; 2. 武汉船用电力推进装置研究所,武汉 430064)
IF控制策略是永磁同步电机的一种无位置传感器开环控制策略,IF控制策略的电流幅值影响电机的转矩匹配和抗扰动能力。电机转速宽范围变化时,传统的恒流频比控制方式不能很好地实现转矩匹配。针对这一问题,提出了根据电机负载转矩曲线设置IF控制电流幅值的控制方式,从而保持IF控制中转矩角不变,实现电机的转矩匹配,维持推进电机的抗负载扰动能力。在永磁同步电机实验平台上,对本文所提的IF控制方式进行了实验验证。
永磁同步电机 IF控制策略 转矩角调节 转矩匹配
0 引言
IF控制是永磁同步电机的一种无位置传感器开环控制策略。IF控制中转速是开环的,而定子电流是闭环控制的。IF控制一般应用在无位置传感器控制的低速区,IF控制对于永磁同步电机的无位置传感器控制具有重要意义。
传统IF控制策略中一般保持电流幅值和频率的比值恒定,因为电机转速提高时,需要的定子绕组电流也在增加。然而应用在不同场合的驱动电机负载转矩曲线不同,恒流频比控制不能很好地实现电机的转矩匹配能力。比如推进电机中,负载转矩不是和转速成正比,而是和转速的幂次方成正比。
理清恒流频比控制的不足之后,本文提出了根据电机的负载转矩曲线来设定电流幅值曲线的IF控制策略。可以较好的实现电机的转矩匹配,弥补了传统恒流频比控制的不足。本文对这种根据负载转矩曲线设定电流幅值曲线的IF控制策略进行了实验验证。
1 IF控制基本原理
IF控制的主要思想是给定定子绕组电流幅值和转子电角度。控制器的电流内环根据给定的电流幅值和转子电角度对电机的定子绕组电流矢量进行控制。IF控制给定电角度并不是真正的转子电角度,两个电角度之间存在相位差。转子实际电角度可以构造转子同步坐标系,IF控制给定的电角度可以构造给定同步坐标系,有的文献里也称为虚拟同步坐标系。IF控制的基本原理框图如图1所示。
由图1可得,IF控制并没有通过传感器检测转子电角度,而是使用了给定的电角度。对定子电流进行坐标变换,使用的就是给定电角度。IF控制中的定子绕组电流可以产生电磁转矩,驱动转子转动,IF控制中给定电角度和转子实际电角度之间会保持一个相位差。因此说这种控制方式是一种无位置传感器控制方式。IF控制中给定电角度和转子实际电角度的相位关系如图2所示。
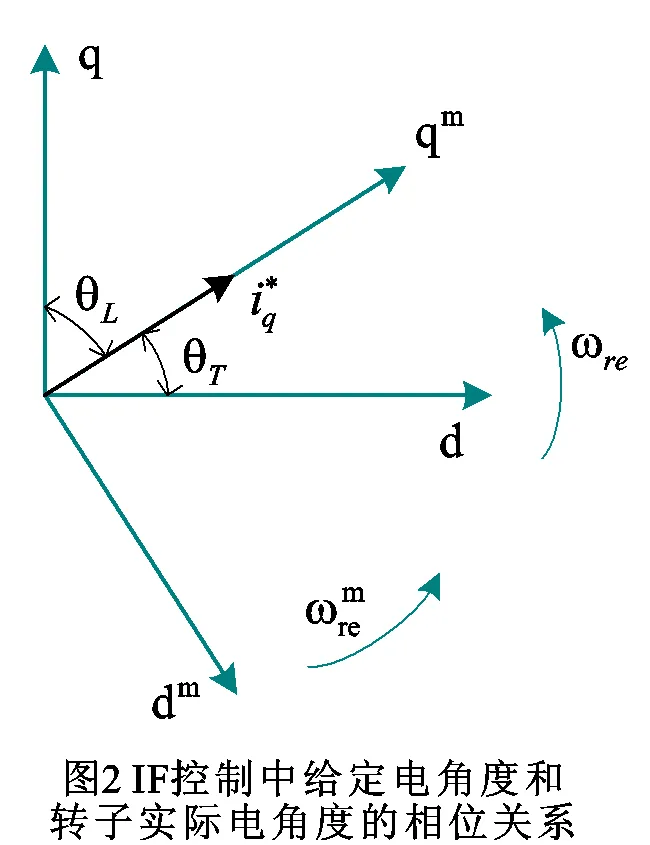
在图2中给出的相对相位关系,设给定同步坐标系和转子同步坐标系之间相位差为L,设相位差L的补角为T,代表了IF控制的转矩角,或者称为功角。在给定同步坐标系下,m轴的电流幅值为0,m轴的的幅值为q*。而在转子实际坐标系中,d轴和q轴的电流幅值和转矩角T有关。d轴和q轴的电流表达式如式(1)(2)所示。

根据d轴和q轴的电流表达式,可以计算电机的电磁转矩,如式(3)所示。其中p表示电机极对数,f表示永磁体磁链。电机达到转矩平衡状态时,电机的电磁转矩等于负载转矩。根据式(3)可知,在IF控制中,如果保持m轴的电流幅值不变,负载转矩的大小就决定了转矩角T的大小。而如果负载转矩一定,则可以通过调节m轴的电流幅值来调节转矩角T的大小。

永磁同步电机的IF控制策略具有“转矩-转矩角自平衡”特性。设IF控制电流幅值不变,电机在某一时刻达到了稳定状态。电机负载转矩增大时,电机会减速,IF控制的转矩角就会增大,使电机输出的电磁转矩等于负载转矩,以达到新的转矩平衡。
转矩角为零时电机输出的电磁转矩为零,转矩角为p/2时,电机输出的电磁转矩最大。但转矩角为p/2时,电机已经处于失步的临界状态,电机已经没有了电磁转矩储备。转矩角为零时,电机的电磁转矩储备最大,电机的抗干扰能力越强。
因此,为了实现电机的稳定可靠运行,需要设定转矩角在一个合理的值,该值的选取要考虑负载的波动特性。理想情况下,在整个IF控制范围内转矩角应该保持不变,使电机具备较好的抗干扰能力。
2 恒流频比控制
恒流频比控制是IF控制的一种方式,顾名思义,即保持电流幅值和转速给定的比值恒定,如式(4)所示。应用这一策略的基本出发点是电机转速提高时,其负载转矩也会相应提高,因此需要提高定子电流幅值。
这种恒流频比控制方式虽然具有一定的转矩匹配能力,但是其转矩匹配能力却不高,主要表现在负载转矩和转矩往往不是成正比例关系。因此电流幅值按正比例增加,无法维持转矩角不变。恒流频比控制的转矩匹配特性可以用图3表示。
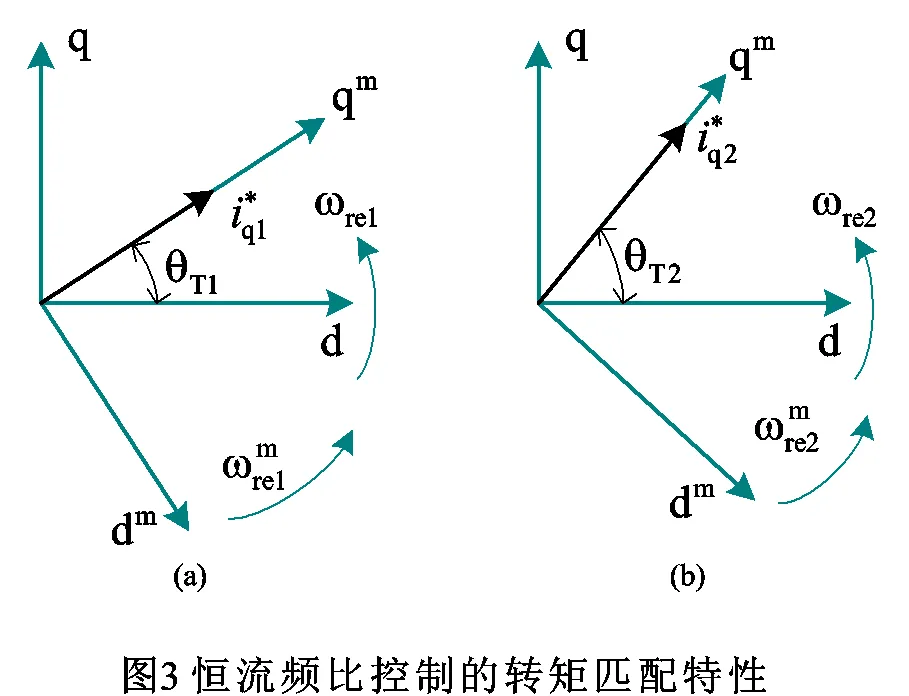
在图3(a)中,转速相对较低,图3(b)中转速相对较高。图3(b)中的负载转矩比图3(a)中的负载转矩大,两者的比值要高于相对应的转速的比值。如果仅仅按照恒流频比进行电流幅值调节,就会造成原有的转矩角不足以支撑负载转矩,转矩角就会增大,以达到新的转矩平衡。图3中采用恒流频比控制引起的结果如式(5)所示。如果转速进一步增大,转矩角也会逐步增大,严重情况下可能会引起电机失步。
3 改进型IF控制
基于恒流频比控制对转矩角调节能力的不足,本文提出了根据电机的负载转矩曲线来设定IF控制电流幅值的控制策略。电流幅值的调节不再依据恒流频比,而是依据预设在控制器内部的负载转矩曲线。而带有不同类型负载的电机,其负载转矩曲线可能会存在较大差异,设电机的负载转矩曲线用式(6)来表示。不管是什么类型的负载,总是可以整理出负载转矩曲线。永磁同步电机的IF控制可以根据式(6)来调节定子电流幅值。

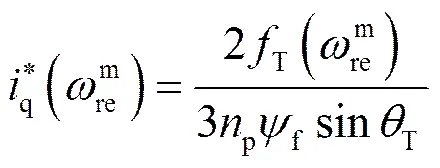
据此计算得到IF控制的电流幅值表达式如式(7)所示,电流幅值是转速给定的函数,其受到负载转矩特性的影响,改进型IF控制方式的目标是使转矩角保持不变,维持电机的抗干扰能力。
永磁同步电机改进型IF控制策略的转矩匹配特性如图4所示。图4(a)中的转速小于图4(b)中的转速,由于图4中根据负载转矩曲线和目标转矩角对定子电流幅值进行调节,因此图4(a)和图4(b)中的转矩角是相同的。这种改进型的IF控制方式,对定子电流的调节更加灵活,对负载转矩的匹配能力也更强。图4中采用改进型IF控制方式的结果如式(8)所示。
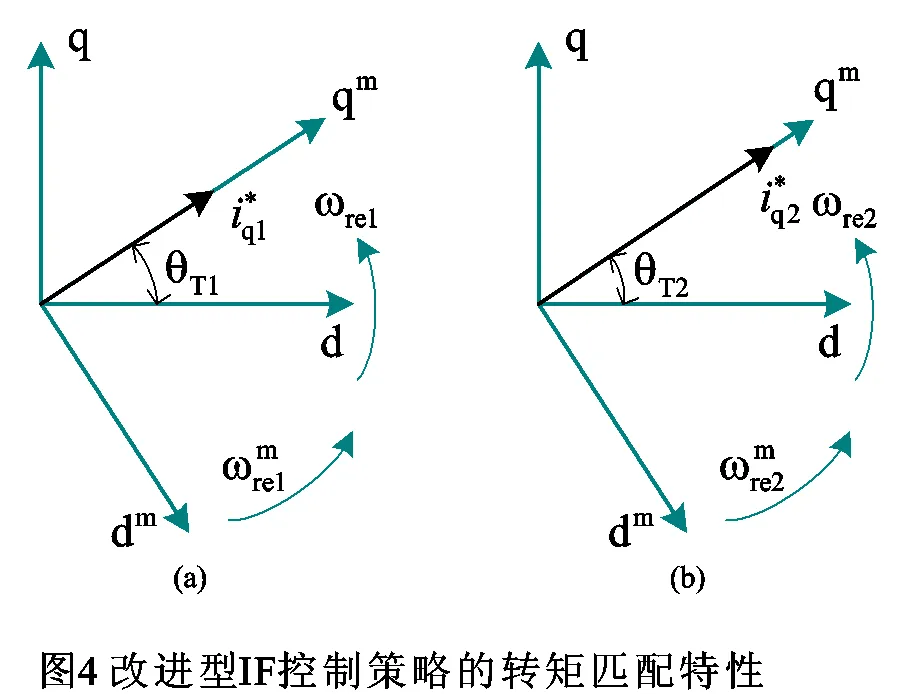
在电机转速宽范围变化时,采用改进型控制策略能够始终保持IF控制的转矩角,始终维持IF控制的抗负载扰动能力。该控制策略和传统恒流频比控制方式相比,具有转矩匹配特性好的优点。
4 实验与分析
在一台推进永磁同步电机上对本文所提改进型IF控制方式进行了实验验证。并将该控制方式和恒流频比控制方式进行了对比分析。采用改进型IF控制方式时,需要将整定好的负载转矩曲线保存在控制其中,以备查表取用。图5是转速为60rpm时的实验波形,两种控制方式的实验波形是相同的。图6和图7分别对应两种控制方式下电机120 rpm时的实验波形。
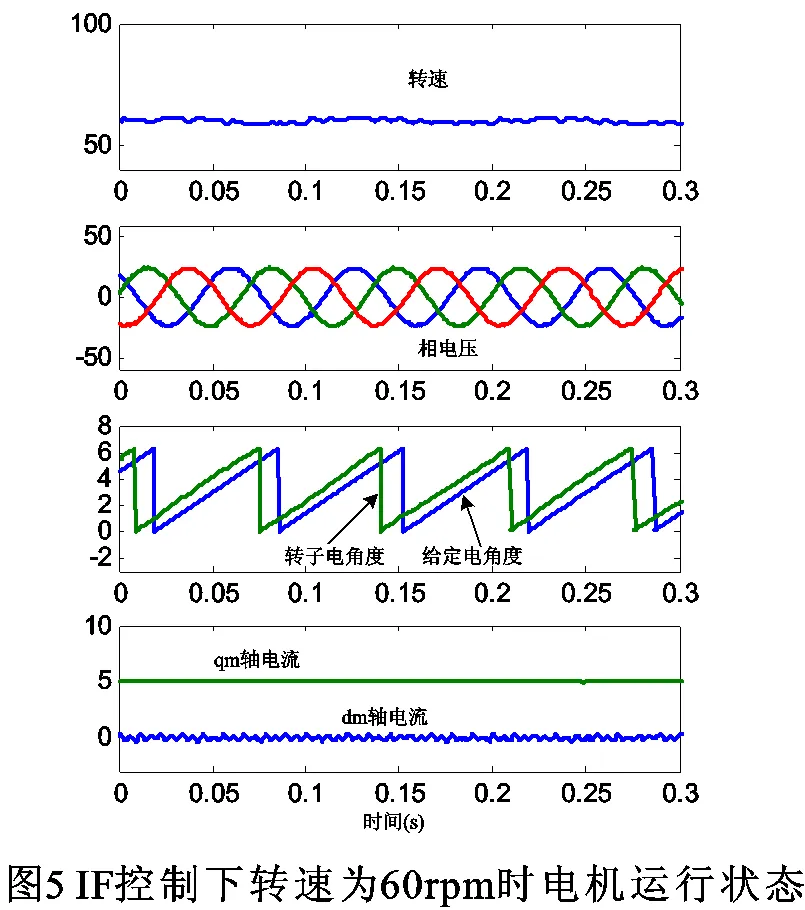
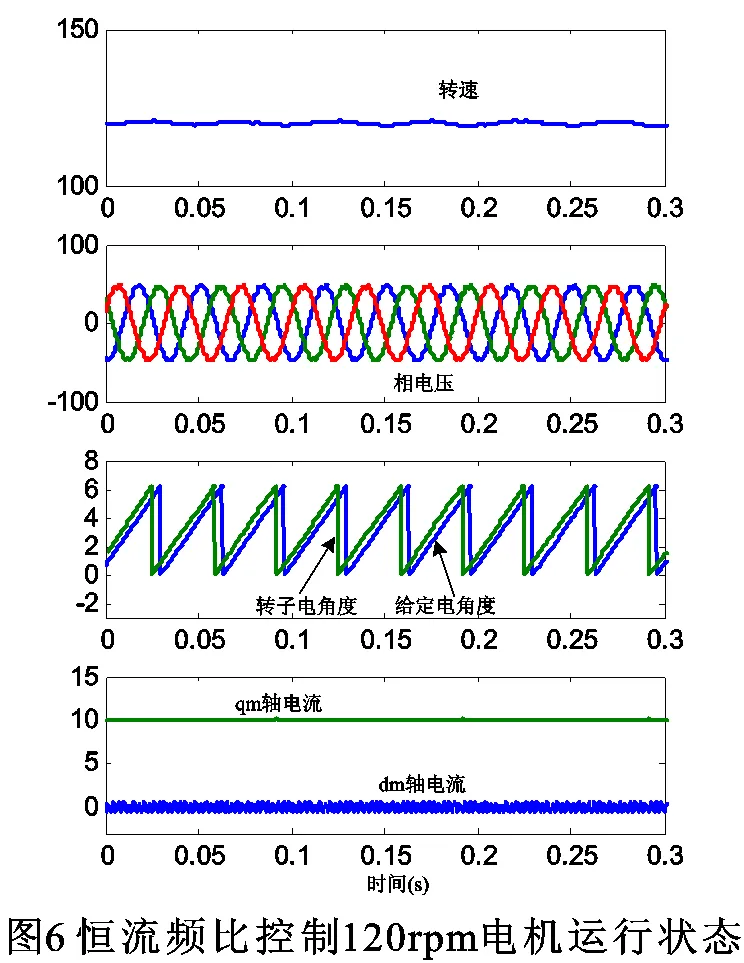

图5中电机转速为60 rpm,两种控制方式得到的定子电流给定均为5 A,此时转子电角度和给定电角度的相位差为60度,电机的转矩角为30度。图6是采用恒流频比控制方式,电机加速到120 rpm时的实验波形,由图6可得,定子电流给定已经上升到10 A,但是这个电流值不足以保持转矩角恒定,电机的转矩角变为46度,并达到了新的转矩平衡。
图7是采用改进型IF控制方式,电机加速到120 rpm时的实验波形,根据预先设定的负载转矩曲线,计算得到的定子电流给定为14 A。定子电流达到14 A时,电机的转矩角保持为30度。通过实验验证了改进型IF控制方式具有保持转矩角不变的能力,能够很好地匹配负载转矩,具有较强的抗负载扰动能力,从而使电机出现失步的概率大幅降低。
5 结论
IF控制是永磁同步电机的一种低成本无位置传感器控制方式,其采用的是转速开环、电流闭环控制方式。IF控制的转矩匹配能力对于电机的稳定运行和抗扰动能力具有重要意义。传统恒流频比IF控制方式的转矩匹配能力较弱,转速宽范围变化时,转矩角也会大范围变化,有可能使电机接近失步的状态。根据负载转矩曲线来设定定子电流幅值的改进型IF控制方式具有更好的负载匹配能力,抗扰动能力更强。在永磁同步电机实验平台上对这两种控制方式进行了实验,验证了改进型IF控制策略的有效性。
参考文献:
[1] 李崇坚. 交流同步电机调速系统[M]. 北京: 科学出版社, 2013.
[2] 马伟明. 舰船综合电力系统中的机电能量转换技术[J]. 电气工程学报, 2015, 10(04): 3-10.
[3] Paul P A, John F W. Review of position-sensorless operation of brushless permanent-magnet machines[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2): 352-362.
[4] Zhu Z Q. Investigation of effectiveness of sensorless operation in carrier-signal-injection based sensorless control methods[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3431-3439.
[5] 李槐树. 永磁同步电机开环控制系统稳定性的数学推导与分析[J]. 电工技术学报, 2014, 29(1): 36-43.
[6] 朱明东. 永磁同步电机高效V/F控制方法研究[D]. 长沙: 湖南大学, 2013.
[7] 王子辉. 永磁同步电机全速度范围无位置传感器控制策略研究[D]. 杭州: 浙江大学, 2012.
Torque Matching Features of IF Control Scheme for Permanent Magnet Synchronous Motor
Zhang Wenbin1, Huang Hua2
(1.Wuhan Kawasaki Marine Machinery CO., Ltd., Wuhan 430084, China; 2. Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM351
A
1003-4862(2016)09-0019-04
2016-08-15
张文斌(1969-),男,高级工程师。研究方向:电力推进主推与侧推控制技术。