低速运动条件下的磁传感器定位方法
2016-10-13周国华赵文春刘胜道
周国华,张 树,赵文春,刘胜道
低速运动条件下的磁传感器定位方法
周国华,张 树,赵文春,刘胜道
(海军工程大学电气工程学院,武汉 430033)
为了提高磁传感器定位技术的实用性,将时分复用技术应用于磁传感器的定位中,有效解决了运动磁传感器的定位问题,提出了基于磁场模值的标量定位方法,解决了背景磁异常对磁传感器定位精度的影响,并理论分析和实验验证了所提方法的可行性,实验结果表明,定位距离在3 m内时误差在厘米级别,并有望随实验条件的改善而提高,且该方法定位的灵敏度非常高。
磁定位 运动传感器 时分复用 地磁异常
0 引言
近年来[1],随着高精度磁场测量技术,特别是高温量子超导干涉仪(HTSQUID)技术的成熟,使得基于目标磁场信号的远程探测成为了可能,通过目标的磁场信号对目标进行探测、识别、定位逐渐成为各国研究的热点问题[1],对目标的磁场信号的采集,往往采用移动式磁性检测技术(英国Ultra Electronicsis公司的TRANSMAG系统等)和固定式磁性检测技术(美国San Diego磁检站等)。两种技术都需要对磁传感器阵列中的传感器进行精确定位[2-5]。利用已知位置的磁源,通过磁传感器自身的磁场测量值对其进行定位,无疑是最经济和高效。文献[6]提出利用舰船自身磁场作为磁源,通过EKF滤波方法求解磁传感器位置,但由于无法获得舰船磁场的精确模型,该方法误差较大。文献[7]提出给每个磁传感器加装螺线管,通过海面磁场测量值对磁传感器定位,该方法成本较高,工程意义不大。文献[8]提出为每个磁传感器加装深度传感器确定垂直坐标,再利用磁传感器测量值,最终确定磁源位置,该方法依赖深度传感器获取垂直坐标,成本较高且应用场合受到限制。文献[9]提出利用已知位置的磁偶极子源,通过磁传感器三分量测量值对其进行定位,然而该方法无法解决地磁异常的影响,定位精度受到影响,且无法对运动传感器进行定位。本文在磁传感器定位中采用了时分复用的思路,实现了对运动传感器的定位,利用磁场模值而不是磁场分量进行定位,有效的解决地磁异常的影响。
1 时分复用技术原理及可行性分析
时分复用(TMD)是信号处理中的一个概念,指的是采用同一物理连接的不同时段来传输不同信号。本文指的是通过开关控制定位所用磁源电流的通断,在磁源电流断开时待定位传感器测量背景磁场(主要是地磁场及磁源载体的固有磁场),在接通时测量磁源磁场。开关通断的频率较快,此时背景磁场随时间的变化可忽略,磁源与磁传感器的相对位置以及磁传感器的姿态也可视为不变。未采用时分复用技术的磁传感器定位,往往先测量背景磁场并把其视为不变量,背景测量值设为(H1,H1,H1),一段时间后,再接通磁源进行测量,测量值设为(H2,H2,H2),当时段内,背景磁场不变且传感器姿态固定时,(H2-H1, H2-H1, H2-H1)便是定位所用的磁源磁场值。当背景磁场随时间改变特别是传感器姿态变化时(由于地磁场量值较大,传感器姿态微小的变化也能造成巨大的影响),该方法几乎不可用。
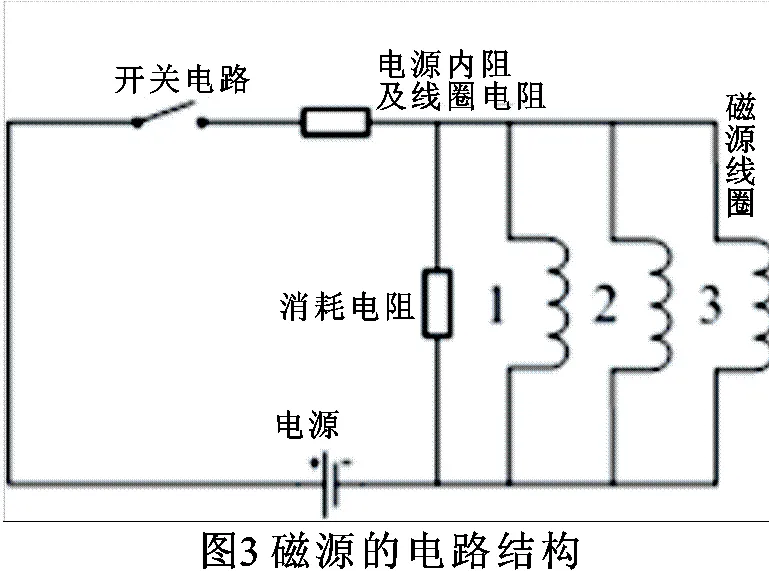
由前文的分析可知,基于时分复用的磁传感器定位技术,关键在于快速的通断磁源电流,从而使得背景磁场和传感器姿态来不及发生变化,几乎同时测量磁源电流通断时刻的磁场值,最终精确求出磁源磁场。然而,磁源往往由线圈绕成,要获得较大的磁场,线圈的电感一般较大,线圈从通电到稳定需要一定时间。这样似乎陷入了一个悖论,为实现时分复用就要求磁源线圈中的电流快速的通断,线圈的大电感又抑制着线圈中电流的变化。因此有必要讨论时分复用技术在磁传感器定位中的可行性,磁源电路如图1所示。
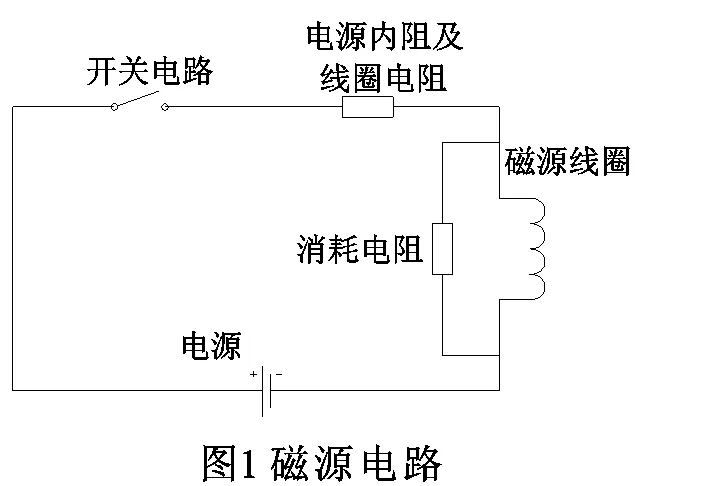
图1中,电源电压为U,电源内阻及线圈电阻为,消耗电阻为(断开时消耗线圈中的能量),线圈电感为,表示线圈中的电流,=0时刻开关接通,0-时刻表示开关接通前,0+时刻表示开关接通后,由于消耗电阻电阻值较大,开关接通时可视为开路,此电路是一阶RL零状态响应电路,线圈的中电流()计算过程如下
根据KVL可得
这是一个一阶非奇次微分方程,初始条件为
(2)
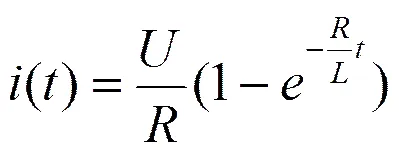
线圈电流的解为
(3)
带入初始条件得
假设当=0时刻开关断开时,此电路是一阶RL零输入响应电路,线圈的中电流()由式(5)给出
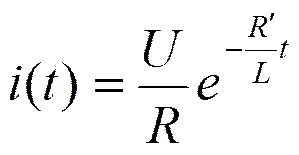
分析式(4)及式(5)可知,要缩短磁源磁场的建立时间,必须增大回路电阻或者减小磁源线圈电感,而要缩短磁源磁场的消退时间,必须增大消耗电阻或者减小磁源线圈电感。下文将结合一系列必须达到的性能参数,讨论确定磁源线圈的匝数,回路电阻及消耗电阻的电阻值,以及计算最终的磁场建立时间及磁场消退时间。
考虑到实际情况,假设磁源的定位有效距离为50 m,普通磁传感器的精度为1 nT(实际精度要高很多),磁源功率为5 kW以下(考虑到散热问题不能过大)。
由磁偶极子的磁场计算公式,并假设磁源位于球坐标系原点,磁矩方向沿极轴方向,可得磁偶极子磁场模值的表达式为
为便于计算简化磁场模值表达式为
(7)
假设磁源的定位距离为50 m,普通磁传感器的精度1 nT,介质磁导率后,求得所需磁源磁矩为=1250 Am,根据前文分析,为了缩短磁源磁场的建立时间,需减小线圈电感并增大回路电阻,因此,在考虑到实际电源性能的情况下并综合成本和制造难度,本文尽量减少线圈匝数(线圈匝数和电感正相关),采用5匝单层铝线圈,线圈平面为1 m*1 m正方性,铝线截面为1 cm *1 cm正方形,由于铝线电阻较铜线高,可以适当缩短磁源磁场的建立时间,同时增加线圈中的热损耗比例(磁源线圈散热较电源好),同时铝线圈成本更低。为达到磁矩要求,线圈中电流为250 A。整个线圈电阻可由式8计算
式(9)中为磁源线圈匝数,为线圈平均周长的一半,为线圈高度,为线圈厚度,为线圈电感,式中长度的单位均为cm,电感的单位为,这里为5匝单层线圈,故为5,为200 cm,为5 cm,为1 cm。最终计算出的磁源线圈电感值约为58。假设线圈电流达到稳定值的99%便可视为磁场建立完毕,带入式(4)便可计算得到线圈的磁场建立时间约为0.0333 s,由于消耗电阻可以选得很大,磁场消退时间相对磁场建立时间可以忽略不计。
基于以上分析可以得出结论,通过合理的选取线圈、电源的参数,时分复用技术是完全可以应用于磁传感器的定位中,磁源线圈的磁场建立时间约为0.0333 s,在如此短的时间里背景磁场随时间的变化可忽略,磁源与磁传感器的相对位置以及磁传感器的姿态也可视为不变。
2 磁传感器的定位方法
前文中提出了时分复用的思想,有效的解决了背景磁场随时间的变化,以及磁源与磁传感器的相对位置和磁传感器的姿态的变化对磁传感器定位精度的影响,但当背景磁场不均匀,这样的情况是普遍的(磁源的载体的磁场或者局部其它磁源的存在),背景磁场在空间各点处将不同(地磁异常),基于磁传感器三分量测量值的传感器定位方法精度将受到影响,如图2所示。
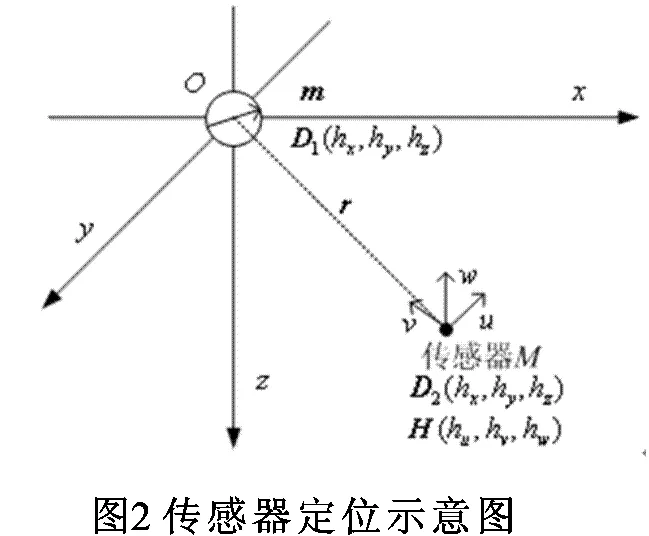
图中定位坐标系为,磁源磁矩为位于坐标系原点,待定位传感器位于点,传感器定位即是要确定位置矢量,点地磁场为,点地磁场为,三分量传感器的三个测量轴分别沿方向,其测量值为,测量值在坐标系中表示为,传统的基于三分量值的定位方法其定位公式如下
式(11)中
(12)
式中矢量均表示在系中的值,其中表示位置矢量,代表磁源磁矩,代表磁源在点处产生的磁场,表示与间的夹角,然而由于传感器仅能测量系中的磁场值,而系与系的关系未知,当地磁场与相等时,可以借助地磁场的方向确定系与系的关系,通过值求出,最终求出,实现磁传感器的定位。
线圈1、2、3的绕法及线圈内电流方向如图4所示。
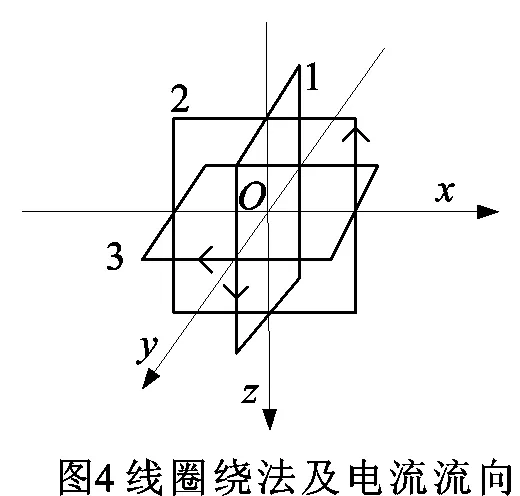
图3中线圈编号与图4一致,图4采用与图2相同的坐标系,线圈1,2,3依次导通,最后时刻线圈均断开,并测量背景磁场。传感器的测量值分别为,,,。磁传感器的位置矢量由下式给出
式中矢量均表示在系中的值,1代表磁源线圈1的磁矩,在这里假设线圈1,2,3的磁矩大小均相同均为,值得指出的是,如果磁矩不同也能求解,需要跟据磁场的线性性质做修正,此处不列出具体过程。代表磁源线圈1,2,3在点处产生的磁场值,它是在系中的值。为了求解磁传感器的位置矢量,必须根据系中的测量值,,,,求解,根据磁场模值的旋转不变性,有如下关系

因而达到了在地磁异常情况下,根据传感器测量值求解传感器坐标的目的。
3 磁传感器定位实验
为了验证基于时分复用技术的磁传感器定位方法的定位精度,本文在实验室环境下对运动磁传感器进行了定位实验,定位所用磁源变化频率为20 Hz,功率1kW,磁源线圈为矩形,面积0.5 m*0.5 m,磁传感器精度1 nT,实验过程示意图如图5所示[10]。
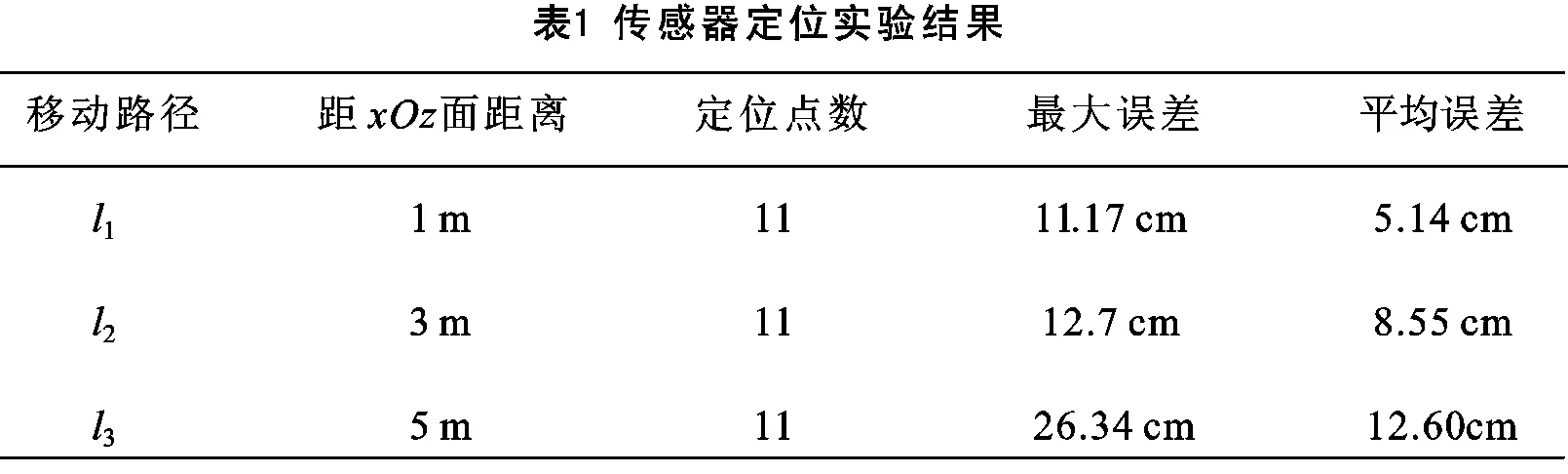
通过实验结果可以看出,距离较近时定位的精度较高,传感器与磁源直线距离3 m以内时,误差基本在厘米级别,而定位距离较远时误差较大,原因可能在于磁源磁矩的计算上,以及受定位所用传感器的精度限制,总的来说定位结果比较令人满意。在实验过程中发现,哪怕是轻轻用手指触动了一下磁传感器,其测量的磁源磁场值也会发生较大的变化,在距离较近时变化尤为明显,这表明磁传感器的定位方法,其灵敏度非常高,特别适用于检测微小的运动,也显示了对磁传感器实现高精度定位的潜力。
4 结论
针对运动磁传感器的定位问题,提出了磁传感器定位中的时分复用思想,并进行了可行性分析及实验验证,实验结果表明,通过时分复用的思想对运动磁传感的定位是可行的,其定位精度较高。由于磁场模值的旋转不变性,提出了基于磁场模值的定位方法,有效的解决了利用磁场三分量定位时地磁异常的影响。相信随着磁传感器的定位技术的不断成熟,磁传感器定位技术将不仅仅局限于军事领域,必将在科研实验、石油钻探、矿物开采及隧道施工等领域发挥重要作用。
参考文献:
[1] Karl H C.A new German mobile magnetic range[C].UDT. Germany: Hamburg Congress Centre, 2001: 314-316.
[2] Nakjem M, Delvág J V, Sovik S.Multi-sensor static and mobile ranges for signature and ambient measurements[C].UDT. Germany: Hamburg Congress Centre, 2001: 279-283.
[3] Davidson S J, Rawins P G, Webb G J.Multi-influence signature gathering from a redeployable range[C].UDT. Germany: Hamburg Congress Centre, 2001:165-169.
[4] Bernard G, Philippe C, René R.SAMIS: A portable mulit-influence signature gathering system[C].UDT. Hawaii: Hilton Hawaiian Village, 2004: 215-219.
[5] Callmer J, Skoglund M, Gustafsson F. Silent localization of underwater sensors using magnetometers [J]. Eurasip Journal on Advances in Signal Processing, 2010, 1(1): 1-8.
[6] 隗艳琳. 舰船近场动态磁场测量中的磁性定位方法研究[D]. 武汉: 海军工程大学, 2009.
[7] 张朝阳, 肖昌汉. 海底布放磁传感器的磁定位方法的模拟实验研究[J]. 上海交通大学学报, 2011, 45(6): 826-830.
[8] 杨明明, 刘大明, 连丽婷, 等. 用海面磁偶极子源定位海底矢量磁传感器[J]. 探测与控制学报, 2011, 33(5): 41-45.
[9] 孙晔, 肖昌汉, 周国华. 磁主动式海底磁传感器定位方法及其解析公式[J]. 海洋测绘, 2012, 32(4): 25-32.
[10] Han G J, Jiang J F, Shu L, et al. Localization algorithms of underwater wireless sensor networks: A Survey [J]. IEEE Sensors Journal, 2012, 12(2): 2026-2061.
Magnetic Sensor Positioning Method under Low Speed Movement Condition
Zhou Guohua, Zhang Shu,Zhao Wenchun,Liu Shengdao
(College of Electrical Engineering, Naval Univ. of Engineering, Wuhan 430033, China)
TM153
A
1003-4862(2016)09-0001-05
2016-05-15
国家自然科学基金资助项目(51377165),海军工程大学自然科学基金资助项目(HGDQNJJ15023)
周国华(1981-),男,讲师。研究方向:电磁环境与防护技术。
