五相永磁同步电机缺相运行的建模与控制
2016-10-13高宏伟杨贵杰
高宏伟 杨贵杰
五相永磁同步电机缺相运行的建模与控制
高宏伟 杨贵杰
(哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
为提高五相永磁同步电机(PMSM)控制系统的可靠性,减小定子绕组发生开路故障时电机输出转矩的脉动分量,提出了五相PMSM缺相运行时的容错控制策略。从矢量空间解耦的角度,建立了含有3次谐波磁场的五相PMSM缺相运行时的数学模型。根据瞬时功率守恒原理,对故障前后的电磁转矩进行分析,提出了平均转矩保持不变的容错控制策略,通过重新分配各相电流的幅值和相位,实现了控制系统的满负荷运行;为了使电机在缺相故障时仍能提供平滑转矩,提出了脉动转矩保持为零的容错控制策略,实现了控制系统的无扰运行。采用转子磁场定向的方法,通过对旋转坐标系下的交直轴电流和零序电流进行控制,实现了对电机输出转矩的补偿。实验结果表明,所提出的容错控制算法能够有效改善五相PMSM在定子绕组发生开路故障时的运行性能。
五相永磁同步电机 开路故障 数学模型 转矩脉动 容错控制
0 引言
在要求低直流母线电压、大输出功率和高可靠性运行的场合,多相电机驱动系统得到了越来越多的关注[1,2]。与传统的三相电机驱动系统相比,其具有如下优点:通过增加定子绕组的相数,降低了对功率器件容量的要求,避免了由功率器件串并联带来的均压、均流等问题;提高了转矩脉动的频率,降低了转矩脉动的幅值,减少了电机的振动和噪声;相数的冗余使多相电机驱动系统具有较强的容错能力,当少量的定子绕组发生故障时,通过采用适当的控制策略,在不改变电路硬件结构的前提下,能够实现故障状态下的无扰容错运行,提高了系统运行的可靠性[3-5]。
多相电机驱动系统中的常见故障分为功率逆变器故障和电机本体故障两种类型,每种故障类型又分为开路和短路两种故障形式[6,7]。对于短路故障,可以通过故障隔离的方法转换为开路故障来处理。上述任意故障发生后,都会造成系统结构的不对称,产生周期性的转矩脉动分量,影响系统的运行性能。容错控制的根本目的是保证电机在故障状态下仍具有一定的输出能力,尽量抑制转矩脉动分量,维持系统的持续、可靠运行[8]。
文献[9,10]以瞬时转矩不变为出发点,结合拉格朗日数乘运算,求解得到容错电流的表达式,达到消除输出转矩中脉动分量的目的,但是该方法的求解过程非常复杂,无法实现在线求解。文献[11,12]提出基于故障前、后绕组磁动势不变原理的容错控制策略,通过重新调整剩余各相电流的幅值和相位,使缺相前后定子绕组产生的磁动势保持不变,从而实现电机的平稳运行,有效改善了调速系统的性能,但是这种方法没有建立缺相后电机的数学模型,只能采用滞环比较的方式来实现对电流的控制。文献[13]通过注入3次谐波电流来消除转矩中的脉动成分,离线推导出最优容错电流的表达式,并结合无差拍电流预测控制算法,解决了滞环电流控制器开关频率不固定的弊端。文献[14,15]采用矢量空间解耦的方法,在一相定子绕组发生开路故障时,建立了双三相感应电机的数学模型,并实现了基于转子磁场定向的矢量控制。文献[16]根据不同中性线连接方式对系统模型的影响,建立了双三相永磁同步电机的数学模型,对定子电流加以不同的约束条件,推导出定子铜耗最小和定子电流幅值最小的矢量控制策略。
本文根据瞬时功率守恒原则,对发生开路故障后的电磁转矩表达式进行分析,其中既有恒定分量又有脉动分量,在此基础上提出了平均转矩保持不变和脉动转矩保持为零的两种容错控制策略;从矢量空间解耦的角度出发,建立了含有3次谐波磁场的五相永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)在A相定子绕组发生开路故障的数学模型,并采用转子磁场定向的方法,通过对零序空间电流进行优化控制,实现了对电机输出转矩的补偿;设计了五相PMSM控制系统实验平台,实验结果验证了所提容错控制策略的可行性和有效性。
1 不对称五相PMSM的数学模型
1.1 自然坐标系下的数学模型
当五相PMSM的定子A相绕组发生开路故障后,剩余四个正常相在自然坐标系下的定子电压方程可以表示为

其中
定子磁链方程可以表示为

式中,4s为定子电感矩阵;4m为与定子绕组交链的永磁体磁链。
在实际应用中,为了有效降低气隙磁通密度的峰值,提高铁心材料的利用率和电机的输出转矩,通常在电机的定子绕组和转子磁场中有意注入特定比例的3次谐波分量。根据绕组函数理论,对于含有3次谐波分量的五相PMSM,当定子A相绕组发生开路故障时,求得定子绕组电感矩阵的表达式为
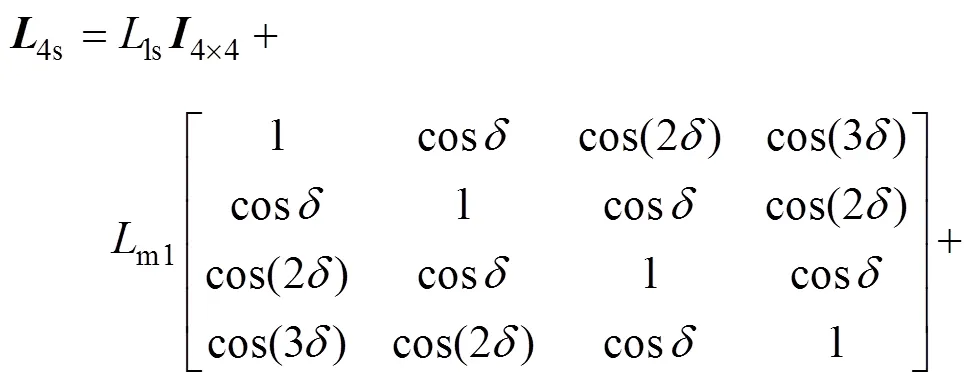
式中,ls为定子绕组的漏感;m1和m3分别为基波和3次谐波电感幅值;为相邻两相绕组轴线间夹角,=2p/5。
永磁体磁链的表达式为

式中,m1和m3分别为基波和3次谐波磁链幅值。
根据电机学原理的虚位移法,在电流不变时,电磁转矩等于磁共能co对转子机械角的偏导数,即

式中,m为转子机械位置角;e为转子电气位置角;为电机极对数。
1.2 旋转坐标系下的数学模型
五相PMSM正常运行时的磁场定向控制方法遵循幅值和磁动势不变的原则,通过相应的坐标变换,消除了系统的非线性,实现了电流、磁链和转矩的解耦控制[17,18]。对于含有3次谐波分量的五相PMSM,当定子A相绕组发生开路故障后,同样可以按照前述坐标变换的原则得到其在旋转坐标系下的数学模型。选取a1轴和a3轴与A相绕组磁动势的轴线重合、b1轴和b3轴分别超前a1轴和a3轴90°电角度。按照变换前后磁动势不变的原则,相应的静止坐标变换矩阵为[19]


以上得到的是静止坐标系之间的变换矩阵,考虑到z1z01子空间和z3z03子空间中的变量不参与机电能量转换,因此只需对a1b1子空间和a3b3子空间中的变量进行旋转坐标变换,将其变换到d1q1和d3q3坐标系下,相应的旋转坐标变换矩阵为


将式(6)~式(9)分别作用于式(1)和式(2)的两侧,同时考虑到ls<<m3<m1,可将ls忽略不计,得到旋转坐标系下的定子电压方程,即



式中
对于转子为隐极结构的五相PMSM,由于气隙均匀,定子电感矩阵中不存在与转子位置角相关的量,因此电磁转矩方程(5)可写为

由式(13)可知,该电磁转矩表达式与电机正常运行时具有相同的形式。
2 不对称五相PMSM的容错控制策略
2.1 电磁转矩
对于定子绕组和转子磁场中含有3次谐波分量的五相PMSM来说,其反电动势定义为

式中,m1和m3分别为基波和3次谐波反电动势的幅值。
五相PMSM正常运行时各相绕组中的励磁电流表达式为

式中,m1和m3分别是基波和3次谐波电流幅值。
根据瞬时功率平衡原则,反电动势和励磁电流相互作用产生的功率等于电机的输出功率,其表达式为

当定子A相绕组发生开路故障时,如果继续使用原来的控制方法,瞬时功率的表达式变为

前面推导了五相PMSM在定子A相绕组发生开路故障前后,电机输出转矩的表达式。通过分析可以看出,当电机正常运行时,相同次数的反电动势和定子电流相互作用,产生恒定的输出转矩,不同次数的反电动势和定子电流相互作用,产生的平均转矩和脉动转矩均为零;当电机缺相运行时,如果继续使用原来的控制方法,电机输出的平均转矩将降低为正常运行时的80%,并且叠加有2、4、6次脉动分量,导致控制系统性能下降。
2.2 平均转矩保持不变的控制策略
当幅值最大的相电流达到逆变器功率器件的额定值时,将限制电磁转矩的输出极限。因此,为了提高故障状态下电机的最大输出转矩,设定五相PMSM的定子A相绕组发生开路故障后,其余四相电流基波和3次谐波分量的幅值保持相等,且关于故障相对称分布,其表达式为
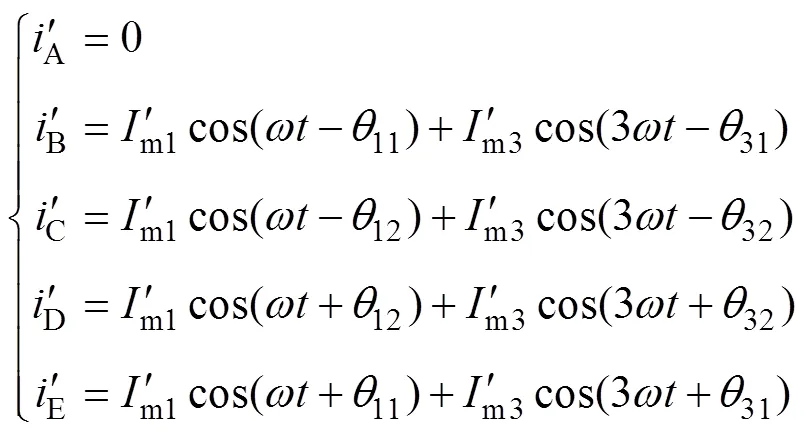
根据发生缺相故障前后,电机输出的平均转矩保持不变的原则,求得容错电流的解为:11=36°、12=144°、m1=1.382m1、31=108°、32=72°和m3= 3.618m3。
此时电机输出的脉动转矩为

本文实验用电机中3次谐波反电动势与基波反电动势的比例关系为m3=0.243m1。为了最大限度地消除脉动转矩的影响,根据式(19)可得3次谐波电流幅值与基波电流幅值的比例关系为m3= 0.15m1。此时只剩下4次脉动转矩分量,其值为。
2.3 脉动转矩保持为零的控制策略
式(18)求得的容错电流表达式,并不能消除缺相故障下的电机脉动转矩,始终存在4次脉动分量。对于实际应用中要求较高的场合来说,此种控制策略不能满足要求。如果满足故障状态下电机输出的脉动转矩等于零,同时兼顾电机的最大输出转矩,可以通过调整3次谐波电流的幅值和相位来实现。由于3次谐波电流的幅值相对于基波分量来说很小,故可忽略其幅值不相等对于转矩输出极限的影响,设此时的容错电流表达式为

根据发生缺相故障后,电机输出的脉动转矩保持为零的原则,求得此时容错电流的解为:11=36°、12=144°、m1=1.382m1、31=18°、32=44.28°、m31=1.176m3、m32=1.561m3和m3=m1m3/m1。
此时电机输出的平均转矩为

由式(16)可知,含有3次谐波反电动势的五相PMSM正常运行时,通过注入特定比例的3次谐波电流,可以增加五相PMSM的输出转矩;由式(21)可知,当定子A相绕组发生开路故障后,注入的3次谐波电流反而会降低五相PMSM的输出转矩。
3 不对称五相PMSM的磁场定向控制
基于转子磁场定向矢量控制方法的基本思想是,将交流电机在自然坐标系中的各物理量变换到两相旋转坐标系上,将给定信号分解为励磁分量和转矩分量,从而达到相互独立控制的目的,获得良好的解耦特性[20,21]。
第1节分析了定子绕组结构不对称的五相PMSM在旋转坐标系下的数学模型,将其同正常运行状态下的五相PMSM模型进行对照,可以得出以下几点不同:电机正常运行时,通过旋转坐标变换,可以消除定子交轴和直轴磁链中与转子位置角有关的非线性因素,永磁体磁链折合到定子侧为恒定值;电机缺相运行时,由于绕组不对称结构的影响,定子交轴和直轴磁链均由两部分组成,即定子电流产生的磁链和定子绕组交链的永磁体磁链,且这两部分均含有与转子位置角相关的非线性因素,并没有实现完全解耦。
为了消除定子磁链非线性因素的影响,实现不对称五相PMSM的解耦控制,需要在式(10)和式(11)的两边分别乘以1()和3()的逆矩阵,得到一种准解耦的形式,即


式中,1()和3()项的值随转子位置做周期变化,可以将其看作干扰项,通过前馈的方法进行补偿。若忽略1()和3()项不计,则式(22)和式(23)与电机正常运行时的电压方程具有相同的结构形式。
因此,在新的旋转坐标系下控制定子电流直轴分量等于零,可以实现不对称五相PMSM的磁场定向解耦控制。对于含有3次谐波磁场的五相PMSM,需要对基波电流和3次谐波电流分别进行控制。图1给出了一相开路五相PMSM矢量控制系统的原理框图,该系统采用的是SPWM(sinusoidal pulse width modulation)调制方式。
对于零序子空间中的电流z1和z3,可以根据式(18)和式(20)中解出的各相电流表达式,对其进行坐标变换之后得到。式(24)和式(25)分别给出了采用第2节中的平均转矩保持不变的控制策略和脉动转矩等于零的控制策略时,各零序子空间中的电流参考值。


4 实验
在前面理论分析的基础上,利用英飞凌公司的TC1767型号单片机作为控制芯片,搭建了五相PMSM矢量控制系统的实验平台,对本文提出的容错控制策略进行实验验证。

图1 一相开路五相PMSM矢量控制系统原理框图
将实验用五相PMSM定子绕组外接5个星形联结的电阻作为负载,用直流电机拖动其进行匀速旋转,当旋转频率为10Hz时,测得定子A相绕组上的反电动势波形及频谱如图2所示。由于对称连接的电阻负载抵消了5次谐波分量,反电势波形中仅含有基波和3次谐波分量,其中3次谐波相对于基波的比值约为m3/m1=0.243。

(a)

(b)
图2 反电动势波形及频谱
Fig.2 Back-electromotive force waveform and spectrum
电机正常运行时,采用基于转子磁场定向的矢量控制策略,3次谐波电流的注入率分别设定为=0.057和=0.243,测得的相电流波形、在静止坐标系a1b1和a3b3下的电流矢量轨迹及转速波形如图3和图4所示,两种情况下给定的电流值均为q1= 1A,此时电机平稳运行,各相电流幅值相等且对称分布。
当=0.057时,3次谐波电流注入相对较少,相电流近似为正弦波形式,基波电流矢量轨迹为圆形,3次谐波电流矢量退至原点;当=0.243时,由于3次谐波电流的注入,相电流近似为马鞍波形式,基波和3次谐波电流矢量的轨迹均为圆形,其幅值分别为1A和0.243A。
(a)

(b)

(c)
图3 正常运行时的实验结果(k=0.057)
Fig.3 Experiment results in normal mode (k=0.057)

(a)

(b)

(c)
图4 正常运行时的实验结果(k=0.243)
Fig.4 Experiment results in normal mode (k=0.243)
定子A相绕组发生开路故障后,无容错控制时的实验结果如图5所示。从图5中可以看出,各相电流波形出现了明显畸变;由于磁动势不平衡,此时的电流矢量轨迹已不再是圆形;电机虽然可以继续运行,但是转速波形出现了较大波动,且平均转速明显降低。

(a)

(b)

(c)
图5 无容错控制时的实验结果
Fig.5 Experiment results without fault-tolerant control
定子A相绕组发生开路故障后,采用本文提出的平均转速保持不变、脉动转矩保持为零策略的实验波形分别如图6和图7所示。

(a)

(b)
图6 平均转矩保持不变策略时的实验波形
Fig.6 Experiment waveforms with average torque remaining constant

(a)

(b)
图7 脉动转矩保持为零策略时的实验波形
Fig.7 Experiment waveforms with ripple torque remaining zero
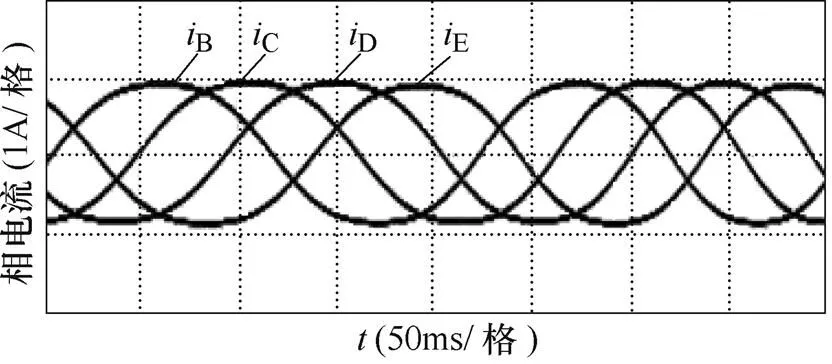
由图6a可以看出,采用平均转矩保持不变的容错控制策略时,各相电流的幅值保持相等,且大于正常运行状态下的幅值;由图6b可以看出,与之前未采用容错控制的结果相比,平均转速维持不变,脉动分量有所减少。
由图7a可以看出,采用脉动转矩保持为零的容错控制策略时,各相电流的幅值不再相等;由图7b可以看出,与之前未采用容错控制的结果相比,转速脉动明显降低,有效改善了电机的控制性能。
5 结论
本文研究了含有3次谐波磁场的五相PMSM在一相定子绕组发生开路故障时的容错控制策略。根据瞬时功率平衡的原则,对容错电流进行了优化设计。电机缺相运行时,3次谐波子空间与基波子空间不再相互解耦,电机输出的平均转矩降低为正常运行时的80%,并且叠加有2、4、6次脉动分量。针对缺相故障后电机控制系统性能的下降,本文提出了平均转矩保持不变和脉动转矩保持为零的两种容错控制策略;采用转子磁场定向的矢量控制方法,实现了对基波电流和3次谐波电流的独立控制。理论分析和实验结果表明,本文所提出的容错控制策略能够有效减小故障后的转矩脉动,实现了五相PMSM的稳定运行,从而验证了该方法的正确性和可行性。
参考文献:
[1] Dordevic O, Jones M, Levi E. A comparison of carrier-based and space vector PWM techniques for three-level five-phase voltage source inverters[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 609-619.
[2] 刘自程, 郑泽东, 彭凌, 等. 船舶电力推进中十五相感应电机同轴运行及容错控制策略[J]. 电工技术学报, 2014, 29(3): 65-74.
Liu Zicheng, Zheng Zedong, Peng Ling, et al. Fixed joint double fifteen-phase induction motor control and fault-tolerant control in ship propulsion system[J]. Transactions of China Electrotechnical Society, 2014, 29(3): 65-74.
[3] Bianchi N, Fornasiero E, Bolognani S. Thermal analysis of a five-phase motor under faulty oper- ations[J]. IEEE Transactions on Industrial Appli- cations, 2013, 49(4): 1531-1538.
[4] Abolhassani M T, Toliyat H A. Fault tolerant permanent magnet motor drives for electric vehicles[C]//IEEE International Conference of Elec- tric Machines and Drives Conference, Miami, FL, 2009: 1146-1152.
[5] 方程, 许海平, 薛邵申, 等. 直驱型多相永磁同步电机转矩脉动及损耗特性[J]. 电工技术学报, 2014, 29(5): 149-159.
Fang Cheng, Xu Haiping, Xue Shaoshen, et al. Torque ripple and losses of direct-drive multi-phase permanent magnet synchronous machines[J]. Transa- ctions of China Electrotechnical Society, 2014, 29(5): 149-159.
[6] 吴一丰, 邓智泉, 王宇, 等. 六相永磁容错磁通切换电机及其单相故障的容错控制[J]. 电工技术学报, 2013, 28(3): 71-79.
Wu Yifeng, Deng Zhiquan, Wang Yu, et al. Six-phase fault-tolerant flux switching permanent magnet motor and control strategy for single-phase fault condi- tion[J]. Transactions of China Electrotechnical Society, 2013, 28(3): 71-79.
[7] 孙宇光, 余锡文, 魏锟, 等. 发电机绕组匝间故障检测的新型探测线圈[J]. 中国电机工程学报, 2014, 34(6): 917-924.
Sun Yuguang, Yu Xiwen, Wei Kun, et al. A new type of search coil for detecting inter-turn faults in synchronous machines[J]. Proceedings of the CSEE, 2014, 34(6): 917-924.
[8] 王永兴, 温旭辉, 赵峰. 六相永磁同步电机缺相容错控制[J]. 电工技术学报, 2015, 30(5): 49-58.
Wang Yongxing, Wen Xuhui, Zhao Feng. The fault-tolerant control for six-phase permanent magnet synchronous machines with one phase failure[J]. Transactions of China Electrotechnical Society, 2015, 30(5): 49-58.
[9] 郝振洋, 胡育文, 黄文新, 等. 永磁容错电机最优电流直接控制策略[J]. 中国电机工程学报, 2011, 31(6): 46-51.
Hao Zhenyang, Hu Yuwen, Huang Wenxin, et al. Optimal current direct control strategy for fault tolerant permanent magnet motor[J]. Proceedings of the CSEE, 2011, 31(6): 46-51.
[10] Zhao Wenxiang, Cheng Ming, Hua Wei, et al. Back-EMF harmonic analysis and fault-tolerant control for flux switching permanent-magnet machine with redundancy[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5): 1926-1935.
[11] 欧阳红林, 周马山, 童调生. 多相永磁同步电动机不对称运行的矢量控制[J]. 中国电机工程学报, 2004, 24(7): 145-150.
Ouyang Honglin, Zhou Mashan, Tong Tiaosheng. Vector control of multi-phase permanent magnet synchronous motor with asymmetric structure[J]. Proceedings of the CSEE, 2004, 24(7): 145-150.
[12] Parsa L, Toliyat H A. Fault-tolerant interior permanent magnet machines for hybrid electric vehicle applications[J]. IEEE Transactions on Vehi- cular Technology, 2007, 56(4): 1546-1552.
[13] 赵品志, 杨贵杰, 李勇. 五相永磁同步电动机单相开路故障的容错控制策略[J]. 中国电机工程学报, 2011, 31(24): 68-76.
Zhao Pinzhi, Yang Guijie, Li Yong. Fault-tolerant control strategy for five-phase permanent magnetic synchronous motor under single phase open-circuit fault condition[J]. Proceedings of the CSEE, 2011, 31(24): 68-76.
[14] Zhao Y F, Lipo T A. Modeling and control of a multi-phase induction machine with structural unbalance. Part I. Machine modeling and multi- dimensional current regulation[J]. IEEE Transactions on Energy Conversion, 1996, 11(3): 570-577.
[15] Zhao Y F, Lipo T A. Modeling and control of a multi-phase induction machine with structural unbalance. Part II. Field-oriented control and experimental verification[J]. IEEE Transactions on Energy Conversion, 1996, 11(3): 578-584.
[16] 杨金波, 李铁才, 杨贵杰. 一相开路双三相永磁同步电机建模与控制[J]. 电工技术学报, 2011, 26(10): 167-173.
Yang Jinbo, Li Tiecai, Yang Guijie. Modeling and control of dual three-phase PMSM with one open phase[J]. Transactions of China Electrotechnical Society, 2011, 26(10): 167-173.
[17] 杨家强, 高健, 金玉龙, 等. 基于矢量控制的多相感应电机电子变极调速技术[J]. 电工技术学报, 2014, 29(3): 96-102.
Yang Jiaqiang, Gao Jian, Jin Yulong, et al. Electronic pole-changing speed adjusting technology of multi- phase induction motors based on vector control[J]. Transactions of China Electrotechnical Society, 2014, 29(3): 96-102.
[18] 朱鹏, 张晓锋, 乔鸣忠, 等. 基于双平面同步旋转变换的五相感应电机气隙磁场间接矢量控制[J]. 中国电机工程学报, 2013, 33(27): 112-119.
Zhu Peng, Zhang Xiaofeng, Qiao Mingzhong, et al. Indirect vector control for air-gap magnetic field of five-phase induction motor through dual-plane synchronized rotation transformation[J]. Proceedings of the CSEE, 2013, 33(27): 112-119.
[19] Ryu H M, Kim J W, Sul S K. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phase[J]. IEEE Transactions on Industrial App- lications, 2006, 42(4): 1062-1070.
[20] 唐俊, 王铁成, 崔淑梅. 五相逆变系统的SVPWM实现方法[J]. 电工技术学报, 2013, 28(7): 64-72.
Tang Jun, Wang Tiecheng, Cui Shumei. Implement- ation method of SVPWM for five-phase inverters[J]. Transactions of China Electrotechnical Society, 2013, 28(7): 64-72.
[21] Carrasco G, Silva C A. Space vector PWM method for five-phase two-level VSI with minimum harmonic injection in the overmodulation region[J]. IEEE Transactions on Industrial Electronics, 2013, 60(5): 2042-2053.
Modeling and Control of Five-Phase Permanent Magnet Synchronous Motor with One Phase Open-Circuit Fault
(School of Electrical Engineering and Automation Harbin Institute of Technology Harbin 150001 China)
To improve the reliability of five-phase permanent magnet synchronous motor (PMSM) control system and reduce the ripple components of output torque when the stator windings occur open-circuit fault, this paper proposed an effective fault-tolerant control strategy for five-phase PMSM. Based on the viewpoint of vector space decoupling, a mathematical model of the five-phase PMSM with third harmonic injection was established. According to the power conservation principle, the electromagnetic torque was analyzed under normal state and fault state, then a fault-tolerant control strategy with unchanged average torque was proposed. This method realizes full-load operation by reallocating the amplitude and phase of the phase current. To obtain a smooth electromagnetic torque under fault state, another fault-tolerant control strategy was then proposed keeping the pulsating torque at zero, which realizes no-disturbed operation. By controlling the electric currents of dq axis and zero sequence in the rotating coordinate system, the electromagnetic torque was compensated. The experimental results show that the proposed fault-tolerance control strategy can improve the running performance of five-phase PMSM under fault state.
Five-phase permanent magnet synchronous motor, open-circuit fault, mathematical model, torque ripple, fault-tolerant control
TM301.2
高宏伟 男,1984年生,博士研究生,研究方向为多相永磁同步电动机驱动系统及其控制技术。
E-mail: ghw840@sina.com(通信作者)
杨贵杰 男,1965年生,教授,博士生导师,研究方向为一体化电机系统驱动与控制。
E-mail: yangguijie@hit.edu.cn
2015-01-24 改稿日期 2015-06-28
国家自然科学基金资助项目(51177026)。