散焦投影三维测量中一种改进的误差扩散核
2016-10-13李宗楠佟新鑫
李宗楠,朱 丹,佟新鑫
散焦投影三维测量中一种改进的误差扩散核
李宗楠1,2,3,朱 丹1,2,3,佟新鑫1,3
( 1. 中国科学院沈阳自动化研究所,沈阳 110016;2. 中国科学院大学,北京 100049;3. 中国科学院光电信息处理重点实验室,沈阳 110016 )
为了提高二值散焦光栅的正弦性,本文基于传统图像半色调领域的Floyd-Steinberg误差扩散抖动算法,提出了一种新的误差扩散算法。首先扩大误差扩散核以减小正弦光栅二值化的量化误差,同时抑制非对称纹理;然后采用线性分配的误差扩散系数来进一步平滑光栅,增强光栅的弥散效果。软件仿真和实验结果表明,与传统Floyd-Steinberg抖动算法相比,所提算法进一步平滑了光栅,减小了三维测量的相位误差。
散焦投影;抖动算法;三维重建;误差扩散
0 引 言
面结构光三维测量方法中的相位测量轮廓术(Phase Measuring Profilometry,PMP)具有高效率、高精度的优点[1-2]。依据数字光处理(Digital Light Procession,DLP)的工作原理,将正弦光栅进行二值化并以散焦的方式模拟正弦光栅的投影,不仅能够克服投影仪的非线性输出问题,还能够大大提升投影速度(10 kHz以上),实现高速测量[3]。
为了得到具有高度正弦特性的光栅,首先是电力电子领域的脉宽调制技术(PWM)被引入[4]。该方法具有良好的测量效果,但只是条纹图案在一维上的优化[5],当条纹较宽时效果将受到限制。除此之外,传统的图像半色调技术或者称之为图像抖动技术,也被应用到正弦光栅二值化领域。常用的图像抖动算法有Bayer有序抖动算法和Floyd-Steinberg误差扩散抖动算法等[6-7]。Bayer有序抖动算法是基于图像与阈值矩阵的比较来获得二值化图像,优点是计算简单,易于实现;缺点是在投影仪接近聚焦的情况下,容易产生可辨识的规律性结构纹理。Floyd-Steinberg误差扩散抖动算法根据误差扩散核将单个像素的量化误差分配到未处理的邻域像素,邻域像素重复相同操作并最终获得二值化图像,亮暗点分布相对随机。
不同的误差扩散算法,由于其在扫描方式或者误差扩散核上的差异,都会对散焦投影效果产生一定影响,因此误差扩散算法仍然有提升空间[7]。本文提出一种基于Floyd-Steinberg误差扩散抖动算法的改进方法,主要在两个方面进行改进:一方面通过扩大误差扩散核函数区域,进一步减小正弦光栅二值化的量化误差;另一方面改进误差扩散权重,采用线性分配的方式,增强图像的平滑效果。以上改进在一定程度上改善了二值化光栅的正弦性,提高了光栅在DLP近似聚焦情况下的测量效果。
1 基本原理
1.1 相移法
采用三步相移法来求解相位。在一次测量中,DLP连续地将三幅相位差为的正弦光栅投射到待测物体表面,相机同步采集的图像分别为
1.2 Floyd-Steinberg误差扩散算法
误差扩散的基本原理是将灰度图像的当前像素值和阈值进行比较,输出一个0或255灰度级,同时将量化误差按照一定权重传递到邻域未处理的像素灰度值中[10]。邻域像素灰度值更新之后,按照相同准则进行遍历,直至得到二值化的图像,其原理框图如图1所示。其中,表示输入灰度图像,为像素灰度值和累积量化误差的和,[ ]表示阈值量化操作,为输出的二值图像,表示量化误差,为误差扩散核函数。该原理可表示为
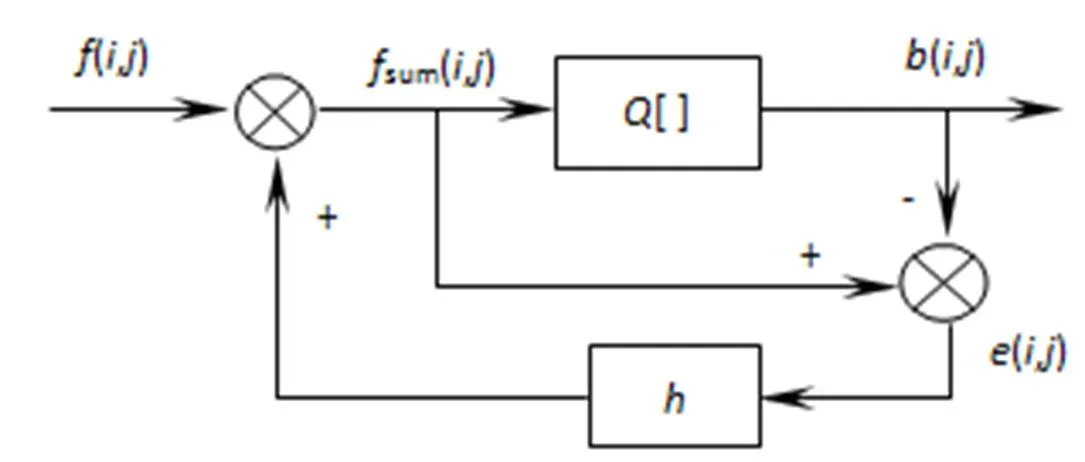
图1 误差扩散算法原理框图
[ ]操作通常取127为阈值。对于Floyd-Steinberg误差扩散抖动算法,其采用的误差扩散核函数为
式中:“-”表示已经处理过的像素,“*”表示当前正在处理的像素,相邻的数字表示该位置分配到的误差的比例。这里,右边邻接像素获得7/16的误差,其它位置以此类推。
1.3 改进的误差扩散算法
Floyd-Steinberg误差扩散抖动算法能够获得效果良好的二值化图像,在图像半色调领域获得了广泛应用。然而在印刷、显示技术不发达的时代,抖动算法的发展是以优化人类视觉感官为目的,并不完全适用于测量领域。例如为了尽可能保持二值化图像的边缘信息,传统算法以最小的误差扩散核(2×3)向邻域分配误差,同时误差分配系数呈近似高斯分布。而在散焦投影测量系统中,正弦光栅经二值化处理之后,以DLP散焦投影的方式投射,然后弥散为近似标准的正弦光栅,因此传统含有边缘信息的二值图像并不适合现代光学测量要求,需要进一步优化。基于该应用背景,为了增强二值化图像的弥散平滑效果,采取两点改进措施:1) 将误差扩散核函数大小由2×3扩大到3×5,将误差充分分配到邻域空间;2) 将原误差扩散核函数类似高斯分配误差的方式,改为线性分配误差方式。改进后的误差扩散核:
2 计算机仿真与分析
图2为计算机生成的相关条纹图案,其中图2(a)为投影系统所需模拟的8 bit标准正弦光栅;图2(b)、图2(c)分别为采用传统Floyd-Steinberg抖动算法和改进算法对图2(a)进行二值化的结果。从图2(b)可以看到较为明显的非均匀纹理,在DLP近似散焦情况下将影响光栅质量;而改进的算法由于优化了量化误差的分布特性,像素分布较为随机,在一定程度上改善了光栅质量,正弦特性没有变化,在DLP散焦后可以用于三维测量。为了量化两种误差扩散算法对测量的影响,需进一步对相位图的相位误差进行对比。实验中以由标准正弦光栅获得的相位图为参考面,以由两种抖动光栅获得的相位图与参考面误差的标准差作为相位误差,进而获得以百分比表示的相对相位误差。其中,二值化光栅的散焦过程采用高斯滤波器来仿真实现[6]。
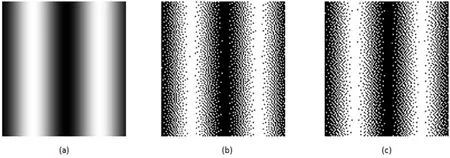
图2 抖动光栅比较(a) 标准正弦光栅;(b) Floyd-Steinberg抖动光栅;(c) 改进的Floyd-Steinberg抖动光栅
首先对比两种二值化光栅在相同散焦程度、不同条纹周期下的相对相位误差。散焦过程分别采用窗口s为5、15,对应标准差为5/3、15/3的高斯滤波器来模拟。同时,逐渐增加条纹周期,变化范围从10到500像素,实验结果如图3所示。从图中可以看出:两种方法的相位误差随着条纹周期的增大而增大;改进的Floyd-Steinberg抖动算法的相位误差小于传统方法,光栅质量更好。
其次,进一步对比在不同散焦情况下的效果。实验采用的条纹周期分别为=100 pixel、=300 pixel,散焦程度分别以窗口大小s为5、7、9、11、13和15,标准差为s/3的高斯滤波器模拟,实验结果如图4所示。由仿真结果可知,两种方法的相位误差都随散焦程度的增加而降低;改进的抖动算法比传统算法的相位误差更小,更有利于减小投影系统的散焦量,对于散焦测量系统的标定更有意义[11]。
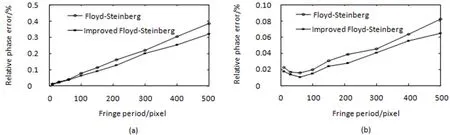
图3 不同条纹周期下相位误差比较(a) fs=5; (b) fs=15
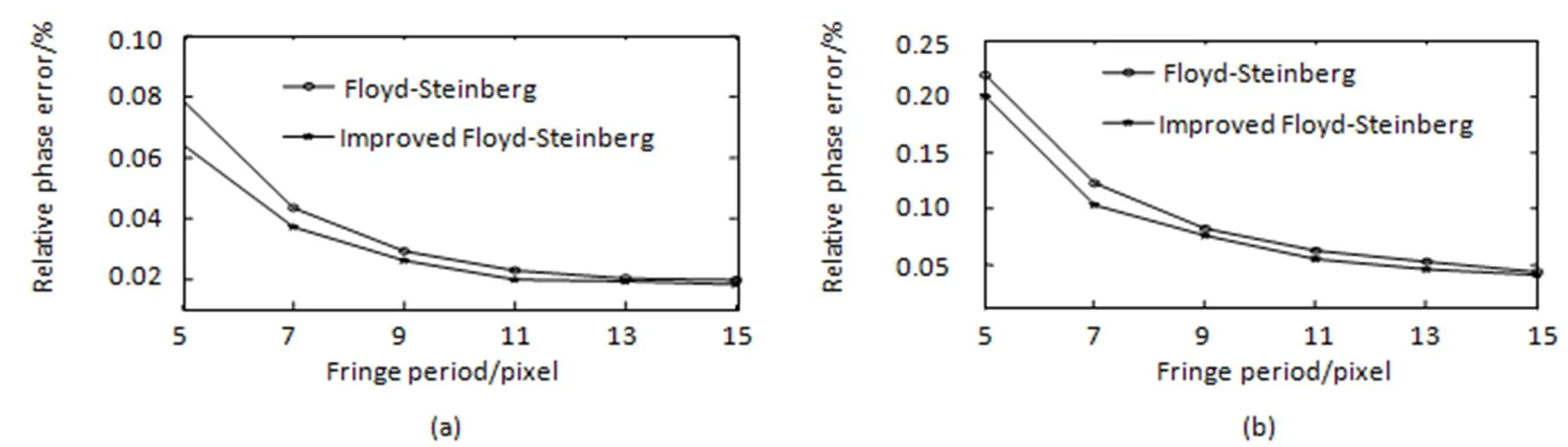
图4 不同散焦程度下相位误差比较(a) T=100; (b) T=300
3 实验与分析
为了验证改进方法在实际3D测量中的效果,以标准白板和石膏头像为测量对象开展实验。3D测量系统的硬件包括DLP投影仪(DLP LightCrafter,分辨率为684×608)和CCD相机(Imperx IGV-B1310M)。
首先分别使用Floyd-Steinberg抖动光栅和改进的光栅测量标准白板,光栅周期变化范围为10到500像素。在每组实验中,以计算机模拟的相位平面为参考面,分别基于该参考面计算相对相位误差。由于在DLP充分散焦状态下,二值化光栅和标准正弦光栅的投影效果趋于一致[5],失去对比意义,因此本实验中DLP调整为轻微散焦状态。图5(a)、图5(b)分别为CCD相机拍摄的一张Floyd-Steinberg抖动光栅和改进的光栅图像,图5(c)为两种方法在不同条纹周期下的相位误差对比结果。两张光栅图像从肉眼观察效果较为接近,但是图5(c)中曲线表明在一定条纹周期范围内,改进光栅的相位误差小于传统Floyd-Steinberg抖动光栅,证明了改进方法的有效性。实验结果与图3仿真结果基本一致。
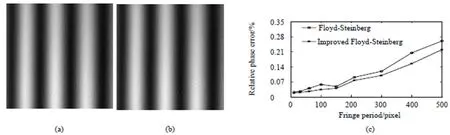
图5 不同条纹周期下实验验证(a) Floyd-Steinberg抖动光栅;(b) 改进的Floyd-Steinberg抖动光栅;(c) 相位误差比较
除此之外,利用该实验装置对形貌更加复杂的石膏头像进行了三维重建,图6显示了两种二值化光栅的测量结果。调整DLP为轻微散焦状态,分别使用传统Floyd-Steinberg抖动光栅和改进的光栅进行三维重建,结果分别如图6(a)和图6(b)所示。同时,为清楚地对比改进效果,图6(c)显示了三维图像第650行的局部相位剖面曲线。然后调整DLP至适当散焦位置,再次使用两种光栅进行重建,结果如图6(d)~6(f)所示。通过对比可以发现,改进算法的重建图像比传统算法平滑,效果有一定提升,证实了改进算法的弥散平滑效果;同时随着散焦程度的加大,两种二值光栅的测量效果趋于一致。
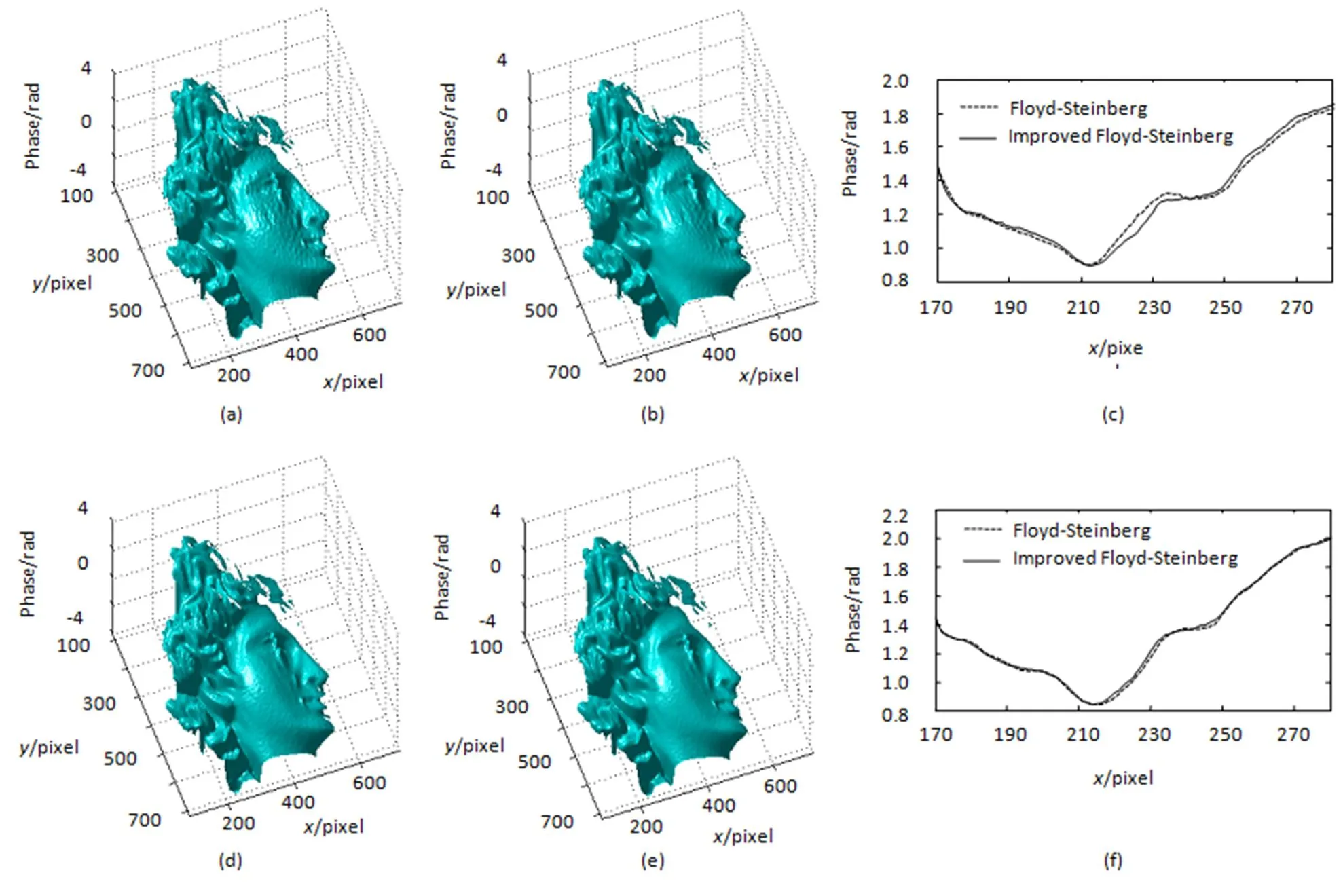
图6 石膏头像二值化光栅测量结果(a) 轻微散焦下Floyd-Steinberg抖动光栅3D重建结果;(b) 轻微散焦下改进的抖动光栅3D重建结果;(c) 轻微散焦下局部相位剖面图;(d) 充分散焦下Floyd-Steinberg抖动光栅3D重建结果;(e) 充分散焦下改进的抖动光栅3D重建结果;(f) 充分散焦下局部相位剖面图
4 结 论
提出了一种改进的Floyd-Steinberg抖动算法,通过扩大误差扩散核以及线性分配误差扩散系数,抑制光栅的非对称纹理,平滑二值化光栅,最终提高光栅的正弦性。论文通过计算机仿真对比了传统方法以及改进算法在不同光栅周期、不同散焦程度下的相位误差,同时对白板和石膏头像进行了测量和三维重建。仿真及实验证明,所提方法能够进一步提高光栅质量,减小相位误差,更加适合散焦投影测量轮廓术。
[1] Srinivasan V,LIU H C,Halioua M. Automated phase-measuring profilometry: a phase mapping approach [J]. Applied Optics(S1559-128X),1985,24(2):185-188.
[2] 马永壮,刘伟军. 一种基于双目主动视觉的线性自标定算法[J]. 机器人,2004,26(6):486-490.
MA Yongzhuang,LIU Weijun. A Linear Self-calibration Algorothm Based on Binocular Active Vision [J]. Robot,2004,26(6):486-490.
[3] GONG Yuanzheng,ZHANG Song. Ultrafast 3-D shape measurement with an off-the-shelf DLP projector [J]. Optics Express(S1094-4087),2010,18(19):19743-19754.
[4] Ajubi G A,Ayubi J A,Martino J M D,. Pulse-width modulation in defocused 3-D fringe projection [J]. Optics Letters(S0146-9592),2010,35(21):3682-3686.
[5] WANG Yajun,ZHANG Song. Comparison among square binary, sinusoidal pulse width modulation and optimal pulse width modulation, methods for three- dimensional shape measurement [J]. Applied Optics(S1559-128X),2012,51(7):861-872.
[6] DAI Junfei,ZHANG Song. Phase-optimized dithering technique for high-quality 3D shape measurement [J]. Optics and Laser in Engineering(S0143-8166),2013,51(6):790-795.
[7] LI Beiwen,WANG Yajun,DAI Junfei,. Some recent advances on superfast 3D shape measurement with digital binary defocusing techniques [J]. Optics and Laser in Engineering(S0143-8166),2014,54:236-246.
[8] Ghiglia D C,Pritt M D. Two-dimensional Phase Unwrapping: Theory, Algorithms, and Software [M]. New York:John Wiley & Sons,1998:4-57.
[9] 李勇,苏显渝. 用于可靠性导向相位展开的快速算法 [J]. 光电工程,2005,32(11):76-79.
LI Yong,SU Xianyu. Fast algorithm for reliability-oriented phase unwrapping [J]. Opto-Electronic Engineering,2005,32(11):76-79.
[10] Floyd R,Steinberg L. An adaptive algorithm for spatial gray scale [J]. Proceedings of the Society for Information Display(S0036-1496),1976,17(2):75-77.
[11] Bell T,XU Jing,ZHANG Song. Method for out-of focus camera calibration [J]. Applied Optics(S1559-128X),2016,55(9): 2346-2352.
An Improved Error-diffusion Algorithm for Projector Defocusing Profilometry
LI Zongnan1,2,3,ZHU Dan1,2,3,TONG Xinxin1,3
( 1. Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China;2. University of Chinese Academy of Sciences, Beijing 100049, China;3. Key Laboratory of Opto-Electronic Information Processing, Chinese Academy of Sciences, Shenyang 110016, China )
To improve the sinusoidal feature of binarized sinusoidal fringe pattern, a new error-diffusion method based on Floyd-Steinberg error-diffusion dithering algorithm in traditional halftoning is proposed. Firstly, the error-diffusion kernel is expanded to reduce quantization error of the binarized sinusoidal fringe pattern and restrain the unsymmetrical texture. And then the error-diffusion coefficients are distributed linearly to smooth the fringe pattern and enhance the dispersion. The simulations and experiments indicate that, the proposed method smoothes the fringe pattern and reduces the phase error of 3D measurement compared with traditional Floyd-Steinberg dithering algorithm.
defocusing projection; dithering algorithm; three-dimensional (3D) reconstruction; error-diffusion
1003-501X(2016)12-0034-06
TH741
A
10.3969/j.issn.1003-501X.2016.12.006
2016-06-06;
2016-08-11
中国科学院重点实验室科研基金(Y3A4072402)资助
李宗楠(1987-),男(汉族),河南三门峡人。硕士研究生,主要研究结构光和视觉检测。E-mail: lizongnan2007@126.com。
