并网型风电机组模拟控制策略
2016-10-13杨俊友王海鑫井艳军邢作霞崔嘉
杨俊友, 王海鑫, 井艳军, 邢作霞, 崔嘉
(沈阳工业大学电气工程学院,辽宁沈阳110870)
并网型风电机组模拟控制策略
杨俊友, 王海鑫, 井艳军, 邢作霞, 崔嘉
(沈阳工业大学电气工程学院,辽宁沈阳110870)
为研究并网型风电机组输出特性,便于在实验室内深入研究风电机组,提出风电机组新型模拟控制策略,实现电动机模拟风力机驱动风力发电机。研究了变桨控制器和转矩控制器在起动过程中对转速的耦合控制,并提出变增益PI控制算法实现对转速的优先控制。通过分析电网电压故障下永磁风力发电机运行情况,完善了模拟控制策略,并进行仿真验证。针对双馈风力发电机研制了由控制系统、执行机构和监控系统组成的试验平台,成功模拟了风电机组输出特性,实现双馈风力发电机并网发电。通过试验验证了风电机组模拟控制策略的正确性和可靠性,可满足风电机组试验的条件。
转矩控制;转矩模拟;变桨控制;风力机;试验平台
0 引言
目前变速式风电机组已成为主流机型,在运行过程中面临的问题如低电压穿越、功率优化及电能质量等,受到国内、外学者的广泛关注。然而一般大型变速式风电机组价格昂贵,给科研人员在实验室内进行试验、研究带来了极大困难。研究人员通过电动机可有效模拟风力机风轮转矩气动特性,但由于机组机械系统中传动链、发电机转矩变化及变桨执行机构响应直接影响风轮转矩输出,因此有必要研究风机模拟系统,为研究风电技术提供新途径[1-3]。
近几年部分学者对风电机组模拟控制开展了一定的研究。文献[4]采用开关磁阻电机实现了风力机模拟,通过转速调节模拟风力机输出功率,缺少对风力机转矩特性的模拟与分析。文献[5]设计了基于RT-lab的无刷直流电机硬件在环模拟系统,利用电动机模拟了风力机转矩特性,没有研究实际发电机并网后的情况。文献[6]基于矢量控制利用感应电动机模拟风力机,分析了风力机的静态特性与动态特性。但没有研究并网后发电机转矩和桨距角变化对风轮气动转矩的影响。文献[7]在不同风速、负载等条件下进行模拟,对模拟系统作了一定简化,控制系统回路中引入了微分算子,易造成系统不稳定。文献[8]对比分析了风力机静态与动态模拟方法的风力机转矩特性,没有考虑风机变桨系统。文献[9]设计负载转矩观测器实现风力机模拟,利用负载转矩和风力机转矩共同觉得模拟电机的转矩参考值,但没有包含发电机转速、转矩等控制算法。针对以上模拟控制方法存在的不足,本文基于转矩观测器通过用电动机模拟风力机转矩特性。考虑桨叶机械执行机构响应时间慢,并设计变桨系统。研究了发电机转矩控制器,实现发电机最优转速控制,分析了机组起动到脱网过程。最后分别对永磁、双馈风力发电机进行仿真与试验,验证了所提控制策略的有效性。
1 风力机系统模型
为实现并网型风电机组风力机模拟控制,必须考虑发电系统反馈转速、功率对风力机转矩的影响,变桨系统对风轮吸收风能的多少至关重要,因此需建立由风轮模拟系统、发电系统及变桨系统组成的风电系统,如图1所示。
图1通过发电机转速ωg反馈值调节变桨系统输出桨距角给定值β*,风轮模拟系统吸收风能后形成气动转矩Ta,拖动风力发电机运行。在一定风速下,风力发电机运行于最优功率状态时,叶尖速比以及转速都达到最优状态。为实现最大风能捕获,采用追踪发电机最优转速ωg,opt控制算法,经过速度控制计算发电机转矩给定值Tg*,并向风力发电机变流器发出PWM信号。风力机数学模型为[10]

式中:TG为发电机电磁转矩;i为齿轮箱变比;B为阻尼系数;ωr为风轮转速;JW与JG分别为风力机与发电机转动惯量;Cp(λ,β)为风能利用系数;λ为叶尖速比;β为桨距角;ρ为空气密度;r为桨叶半径;λopt为最佳叶尖速比;v为风速。为计算风力发电机最优转速,设计风轮转矩的观测器,如图2所示,并通过式(3)计算得到ωg,opt。

图1 风电系统结构框图Fig.1 Block diagram of wind power system structure
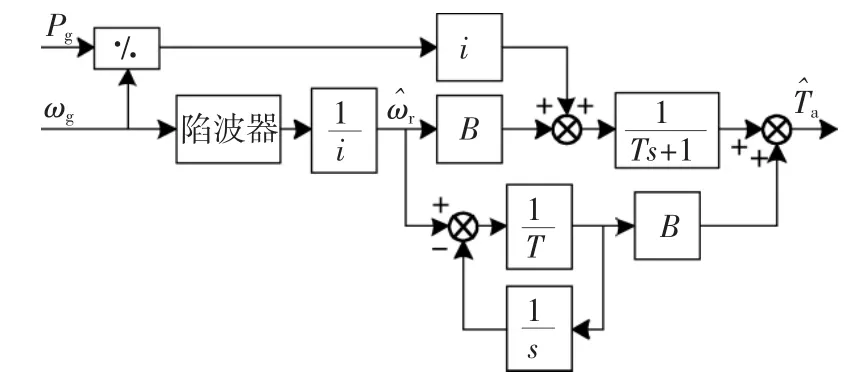
图2 风轮转矩观测器结构Fig.2 Wind turbine torque observer structure
图2中发电机功率Pg与转速ωg为测量值,T为时间常数。通过观测器得出风轮转矩观测值,计算最优转速,并采用速度控制不断减小最优转速与实际转速偏差,实现风功率最大捕获。
通过跟踪最优转速,在不同桨距角及叶尖速比下使风机的风能利用系数为最佳,其Cp值曲面如图3所示。实际应用中利用查表法直接得到最佳叶尖速比,为实现风力机模拟控制提供了方便。
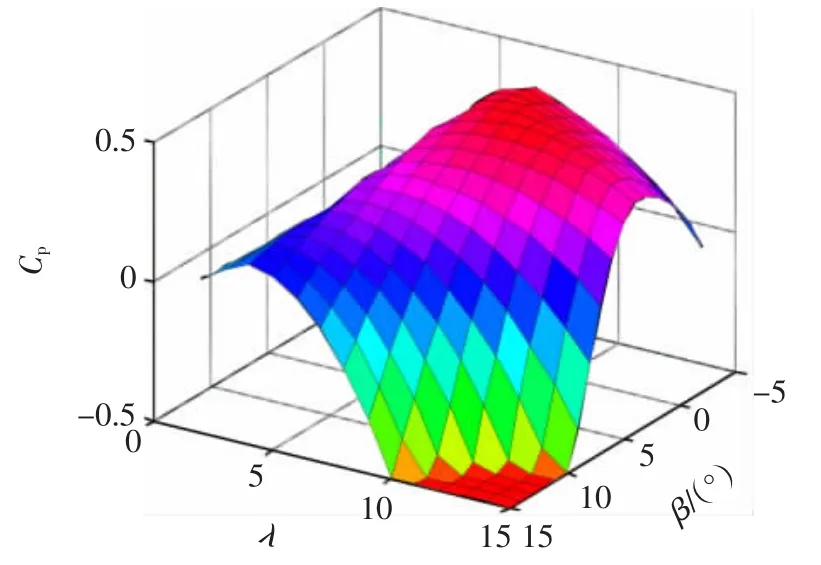
图3 Cp值曲面Fig.3 CpSurface
2 风轮模拟与变桨系统
本系统采用感应电动机模拟风力机转矩特性,驱动风力发电机并网发电。系统主控制器利用输入风速与发电机转速、转矩反馈值计算风轮转矩,并给定至拖动电机。风力发电机组并网后,主控制器给定变流器转矩、功率因数指令,形成闭环控制。
1)风轮转矩算法
为真实模拟风力机转矩特性,实现风力发电机可调速范围内的并网过程,主控系统通过查Cp值调节风轮转矩,由式(2)转换为

实际应用中风轮转矩特性还受到其他因素影响,其中两个关键因素是[11]:当一个桨叶转动经过塔筒时导致风轮转矩减小的效应,即塔影效应;随着距地面高度变化,风速周期性变化导致风轮转矩周期性变化,即风切变效应。这两种输出波动可由式(5)表示[5]为

式中:A=0.2;B=0.4。风轮转矩算法如图4所示。
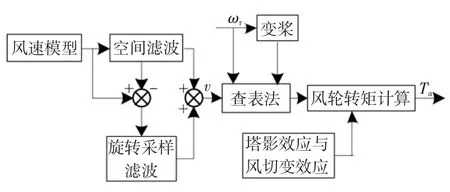
图4 风轮转矩算法框图Fig.4 Block diagram of wind turbine torque algorithm
主控系统调用湍流风模型,空间滤波主要体现风轮扫过面积的平均风速变化。将固定点频谱修正为掠过风轮的平均风速频谱。滤波传递函数为[12]
其中:asf为经验值(asf=0~55);bsf为描述风轮上不同点风速变化关系的参数,bsf=γsf(r/νs),γsf=1.3,νs是轮毂上的平均风速。旋转采样虑波包含了决定风轮转矩变化的影响因素,它取决于在固定点风速湍流部分的桨叶旋转运动。某一给定点上,桨叶风力波动特性与固定点风速模型的湍流特性有所不同。由此风轮模型得出风轮转矩参考值发送至拖动系统控制单元,其中桨距角和风轮转速为风机系统反馈值。
2)拖动电机控制策略
在同步旋转坐标系下将转子磁链矢量ψr定向于d轴,磁链方程为[13-14]
式中:ψrd、ψrq为转子d、q轴磁链;isd、isq为定子d、q轴电流;ird、irq为转子d、q轴电流;Lm、Lr为励磁电感与转子电感。拖动电机电磁转矩TM为

式中:p0为极对数。将式(7)代入式(8),得
保持电动机转子磁链不变,转矩与isq具有线性关系,isd控制电机励磁电流。根据转子 d轴电流方程

式中:p为微分算子。转子磁链ψr变化时,转子绕组内感应电流相应变化。将式(10)代入式(7)求得
ψr变化时,按式(11)控制定子励磁电流,可实现强迫励磁。定子电流闭环控制器按照d、q轴分量形式进行设计。根据风电机组风轮转矩及功率波动特点给定电动机输出转矩参考值TM*,形成转矩外环控制。通过外环控制得出电流参考值,采集电机定子电流is,abc形成电流内环控制,得出电机d、q轴电压参考值usd*、usq*。变频器矢量控制如图5所示。
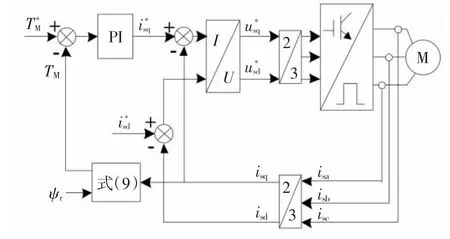
图5 电机控制框图Fig.5 Block diagram of motor control
3)变桨控制算法
变桨距系统中伺服系统作为执行机构,由主控系统发出位置及转速命令。由于变桨距系统电气动态响应时间要比机械动态响应时间小很多,设计变桨距执行机构等效模型为

式中:τβ为时间常数。为补偿风轮非线性气动特性,在变桨系统中通过增益调度算法进行调整,设计控制器如图6所示。
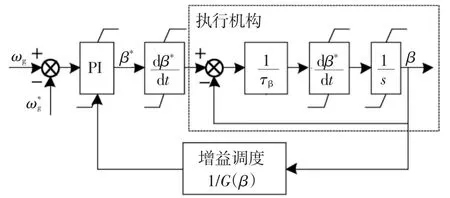
图6 变桨系统框图Fig.6 Block diagram of pitch system
图6中,风机根据不同运行阶段设定转速目标值ωg*,转速目标值与实际转速做比较,并作为变桨控制器的输入。考虑不同桨叶位置的风能利用系数差距较大,引入增益调度1/G(β)改变桨距角调节系数,为实现桨叶稳定运行对变化率进行限幅。
3 发电系统控制策略
3.1基于变增益PI的速度控制
由于采用拖动电机及电力电子装置模拟风轮转矩特性,系统具有一定的滞后性。另外,在机组起动并网后且桨叶尚在开桨阶段时,发电机转速同时受桨距和转矩控制器二者约束。桨距控制器根据转速偏差改变桨距角指令,转矩控制器根据转速偏差改变转矩指令,对转速实施耦合控制。为提高系统响应能力,使机组桨叶尽快达到目标位置吸收较大功率,提出基于变增益PI速度控制,实现最优转速与最大风能跟踪控制,即控制目标为使系统输出ωg不断跟踪最优转速参考值ωg,opt。在起动过程中桨距控制优先于转矩控制,使机组转速大幅度爬升。当桨叶达到目标位置后,转矩控制优先于桨距控制,此后桨距控制主要控制机组额定功率。设计控制算法为

3.2并网控制
永磁与双馈风力发电机因其结构、特性不同,转矩控制算法也不同。永磁风力发电机励磁电流一般设为常值零,双馈风力发电机转子励磁电流随转速变化。对采用矢量控制的永磁、双馈风力发电机模拟控制进行验证,其具体控制算法如文献[15-17]。
当风速达到3 m/s时,风力发电机组开始起动,未到达并网转速前,桨叶处于开桨阶段,桨距角、风轮转矩及转速较小,此阶段主要模拟风轮与变桨系统。根据转速变化由主控系统调节桨距角,根据风速、桨距角由查表法选择最佳Cp值,计算风轮转矩参考值。拖动系统采用转矩调节器计算转矩电流参考值isq*,经过电流调节器得出电压参考值,向功率模块发出PWM信号。
当风机达到并网转速,网侧变流器完成电容充电合闸,机侧变流器开始动态调节励磁电流。对于永磁风力发电机,变流器直接调节转矩电流向电网发电。对于双馈风力发电机,转子励磁电流使发电机定子产生电压,检测定子电压满足并网要求后闭合并网开关,且调节转矩电流向电网发电。若未达到并网要求,转速被变桨系统维持在并网转速以下。
当风电机组完成并网后,主控系统根据反馈电磁转矩与转速得出变流器转矩参考值,此阶段主要模拟风轮、发电机及变桨系统。并网后机组发出功率,负荷增加,风轮转矩增加且随风功率变化。当达到额定风速后,变桨系统将发电功率保持在额定功率以下。当风速低于起动风速时,发电机给定转矩降为零,变流器与电网断开,桨叶处于关桨阶段。
3.3低电压穿越控制
为验证所提出并网型风电机组风力机模拟控制算法的有效性,在电网电压跌落情况下,采用永磁风力发电机进行仿真分析,实现其低电压穿越功能。由于电网电压跌落,导致变流器母线电压骤升,向电网输出电流增大。传统低电压穿越控制策略为定子及直流母线回路增加额外回路或者增大变流器过流、过压能力,增加了机组成本。为此提出机侧变流器与变桨改进控制策略,完善风力发电系统模拟控制算法进行完善。当电网电压故障时迅速有效降低发电机输出功率,为稳定电网电压故障时直流母线电压,提出如下低电压穿越变桨控制与转矩控制算法为

式中:Kβ、Tβ为电网故障下变桨控制比例;积分系数;udc
*与udc为直流母线电压给定值与实际值;Vg为电网电压标幺值。检测到电网电压低于0.9时,转矩与变桨控制切换为如式(12)所述控制算法。当低电压故障持续到超过允许时间625 ms没有回升时,风电机组需完全退出运行,直流母线电容并联卸荷电路维持2~3 s时间,卸荷电路如图7所示。
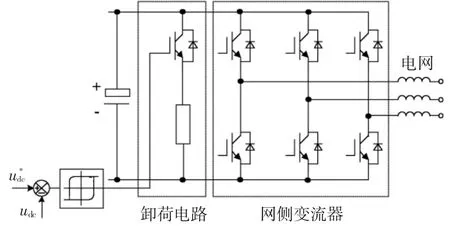
图7 卸荷电路Fig.7 Unloading circuit
卸荷电路在母线电压超出规定值时使用,相比单纯的耗能电路而言,结构简单,能耗较小,不需要考虑较多成本与散热难题。卸荷电路由电阻和IGBT组成,其阻值大小表征机组可承受穿越功率的能力。
通过对永磁风力发电机模拟控制策略建模,进行低电压穿越仿真,永磁风力发电系统参数:齿轮箱变比i为1;风轮桨叶数3;桨叶半径62.94 m;风轮转速0~20 r/min;额定风速12 m/s;电动机额定功率15 kW;电动机额定电压400 V;电动机额定电流30 A;电动机额定频率51 Hz;电动机额定转速1 500 r/min;永磁发电机额定功率10 kW;发电机定子额定电压380 V;发电机定子额定电流30 A;发电机额定频率50 Hz;发电机额定转速110 r/min;发电机定子电阻0.9 Ω;发电机直轴电抗4.2 Ω;发电机交轴电抗16.6 Ω;直流母线电压580 V。仿真时间为1 s,在0.03 s时电网电压跌落至20%,跌落时间为625 ms,图8~图10为仿真结果。
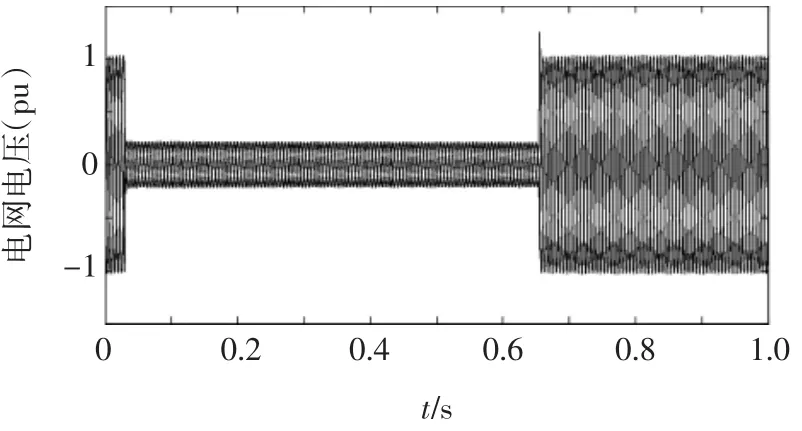
图8 电网电压跌落曲线Fig.8 Grid voltage drop curve

图9 发电机有功功率Fig.9 Generator active power

图10 直流母线电压曲线Fig.10 DC bus voltage curve
图8为电网电压跌落曲线。电网电压跌落瞬间,母线电压增大,发电机功率立即由10 kW减小至2 kW左右,如图9所示。随后由于功率有效减少,母线电压逐渐恢复平稳。在0.655 s时恢复电网电压正常,功率也跟随恢复正常值,由于功率变化率较大,导致母线电压出现波动,如图10所示。基于风力机模拟控制策略实现了永磁风力发电机低电压穿越功能。
4 试验验证
为进一步验证所提并网型风电机组风轮模拟控制算法对双馈风力发电机的有效性和真实性,研制了一套10 kW双馈风力发电机模型机组试验平台,具备兆瓦级风电机组的基本功能。在模型机组中,采用电动机直接拖动发电机,并通过齿轮带动轮毂。感应电动机由变频器控制,双馈发电机由基于矢量控制的双PWM变流器控制。轮毂内采用伺服电机驱动桨叶开、关桨,样机如图11所示。

图11 风力发电机模型样机Fig.11 Prototype of wind power system
双馈风力发电系统参数:并网转速范围800~1 500 r/min;齿轮箱变比97;机械制动方式为高速轴液压抱闸;双馈发电机额定功率10 kW;定子额定电压380 V;定子额定电流22 A;转子额定电流5.7 A;转子开口电压1 047 V;额定转速1 200 r/min;定子电阻0.73 Ω;定子电抗0.66 Ω;磁化电抗22.8 Ω;转子电阻0.59 Ω;转子电抗1.29 Ω;风轮模拟系统参数与永磁风力发电系统一致。
主控系统调用由美国可再生能源实验室开发FAST软件生成的湍流风速,使风轮模拟系统吸收风能,双馈风力发电机组起动。达到并网转速时,发电机投入励磁电流进入并网状态。通过计算得出风轮转矩,由拖动电机模拟并驱动发电机,给定变流器功率因数为1.0,双馈风力发电模型机组试验结果如图12~17所示。

图12 湍流风速Fig.12 Turbulent wind
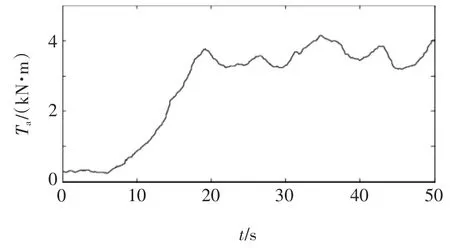
图13 风轮转矩Fig.13 Wind turbines torque
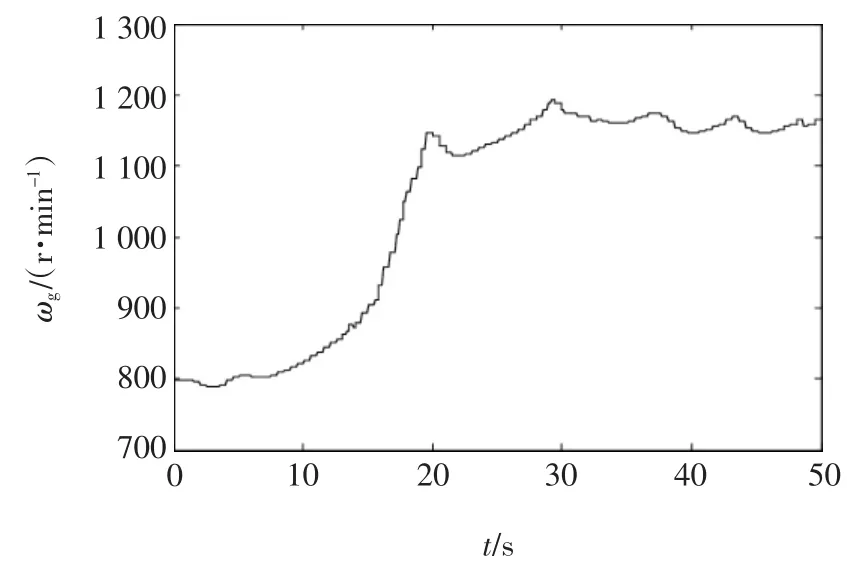
图14 发电机转速Fig.14 Generator speed
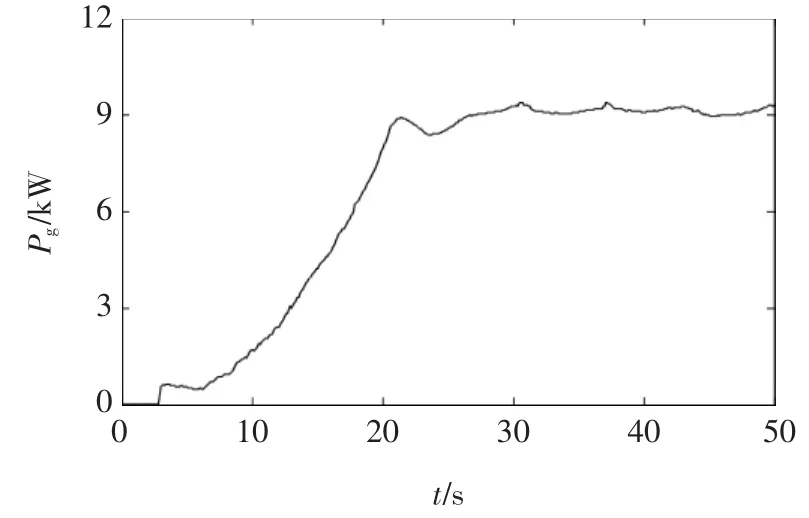
图15 发电机有功功率Fig.15 Generator active power
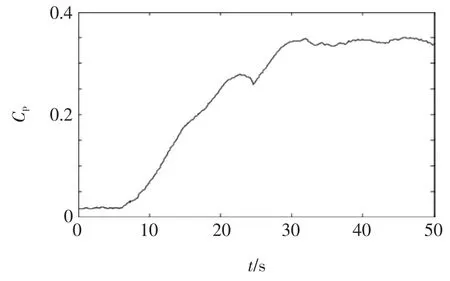
图16 Cp值曲线Fig.16 Cpcurve
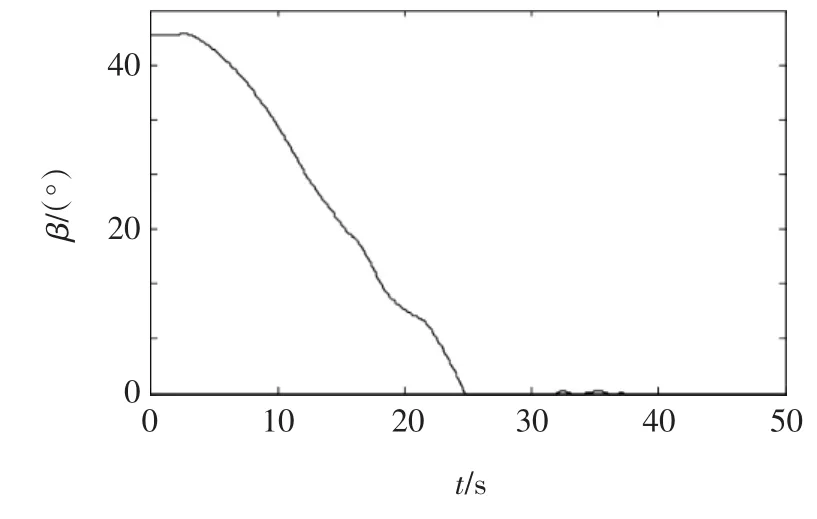
图17 桨距角Fig.17 Pitch angle
通过以上结果可以看出,模型机组在约3 s时开始并入电网。随着桨距角不断增大,模型机组吸收的模拟风功率不断增大,发电机转矩增加,发电机功率与模拟的风轮转矩增大,同时,桨距角开桨至0°。尽管风速变化波动很大,拖动系统中模拟的风轮转矩变化趋势较为平滑。随着Cp值不断增大,在机组起动开桨阶段,转速受桨叶控制因素较多,处于迅速上升阶段。当正常运行后,桨叶位置较为稳定,转速受发电系统转矩控制,处于稳定变化范围内。风能利用系数Cp值在25 s左右突然变化,使风力机转速与转矩波动。从30 s之后Cp值逐步稳定,机组也逐步稳定。为了进一步验证电动机的转矩模拟特性,在上述模型机并网试验情况较稳定后记录了80 s的电动机相关数据,如图18~20所示。
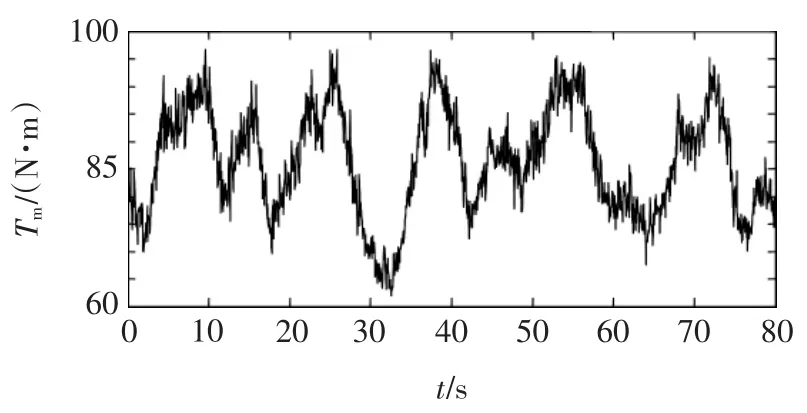
图18 电动机转矩Fig.18 Motor torque
由图18可以看出,在风速变化较大的情况下,通过模型机组拖动系统控制,电动机所模拟风轮转矩受风速大小等参数影响,转矩波动情况与实际基本一致,达到了预期试验效果。对电动机转矩偏差进行PI控制,计算得出转矩电流参考值,由转矩电流偏差经过电流调节器,控制电动机输出转矩。试验结果表明电流实际值较稳定跟踪参考值变化,且与实际转矩变化波形基本一致,转矩动态调节响应较快,如图19、图20所示。
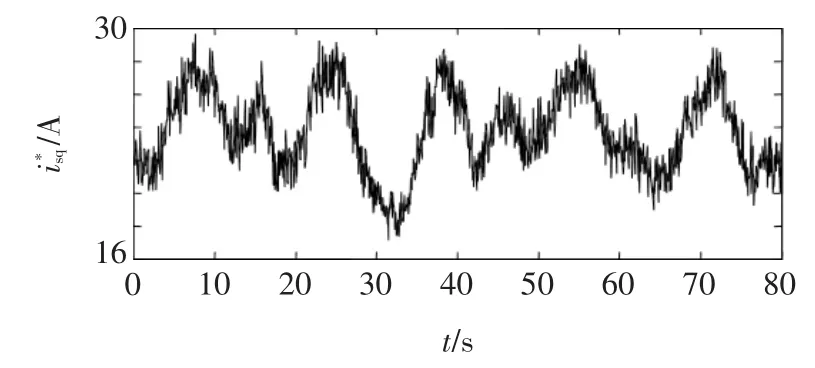
图19 电动机转矩电流参考值Fig.19 Motor torque current reference
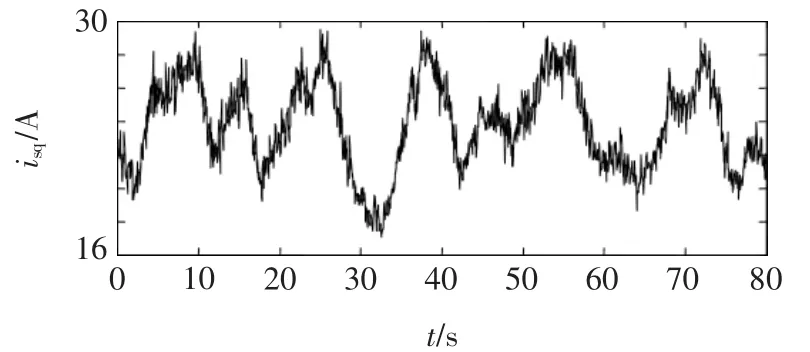
图20 电动机转矩电流实际值Fig.20 Motor actual torque current
5 结论
1)通过跟踪最优转速方法实现最大风能跟踪,并分别针对永磁与双馈两种风力发电机进行了仿真与试验,验证了风电机组模拟控制策略的正确性,并对其进行了完善。对风轮模拟采用转矩控制,实现了更加准确地模拟风轮转矩特性。试验结果表明可以通过最优转速跟踪保证转风力机矩特性更加稳定。
2)并网前风机转速受桨距角约束,风力机转矩较小。并网后在开桨阶段转速上升,转矩控制器与变桨控制器同时对转速实施耦合控制。通过所提基于变增益PI的转速控制算法,实现对转速的优先控制,使桨叶快速到达目标位置,提高机组效率。
[1]由蕤,柴建云,孙旭东,等.电磁耦合调速风力发电机组模拟实验研究[J].中国电机工程学报,2013,33(3):92-98. YOU Rui,CHAI Jianyun,SUN Xudong,et al.Experimental study of variable speed wind turbine based on electromagnetic couplers[J].Proceedings of the CSEE,2013,33(3):92-98.
[2]DANG D Q,WANG Y,CAI W.Offset-free predictive control for variable speed wind turbines[J].IEEE Transactions on Sustainable Energy,2013,4(1):2-7.
[3]Brice Beltran,Mohamed El Hachemi Benbouzid,Tarek Ahmed-Ali.Second-order sliding mode control of a doubly fed induction generator driven wind turbine[J].IEEE Transactions on Energy Conversion,2012,27(2):261-265.
[4]张艳杰,徐丙垠,熊立新,等.一种基于SRD模糊控制的风力机模拟器[J].电机与控制学报,2011,15(1):38-43. ZHANG Yanjie,XU Bingyin,XIONG Lixin,et al.Wind turbine simulator based on fuzzy control of SRD[J].Electric Machines and Control,2011,15(1):38-43.
[5]李吉晨,周波,薛峰.基于无刷直流电机的风力机特性模拟[J].电力自动化设备,2012,32(10):17-21. LI Jichen,ZHOU Bo,XUE Feng.Characteristic imitation of wind turbine based on BLDCM[J].Electric Power Automation Equipment,2012,32(10):17-21.
[6]陈毅东,杨育林,王岩禄,等.兆瓦级风力机特性模拟器[J].电力自动化设备,2012,32(3):85-89. CHEN Yidong,YANG Yulin,WANG Yan,et al.Simulator of characteristics for megawatt wind turbine[J].Electric Power Automation Equipment,2012,32(3):85-89.
[7]陈杰,陈家伟,陈冉,等.基于永磁同步电机的风力机动静态特性模拟[J].中国电机工程学报,2011,31(15):40-46. CHEN Jie,CHEN Jiawei,CHEN Ran,et al.Static and dynamic behaviour simulation of wind turbine based on PMSM[J].Proceedings of the CSEE,2011,31(15):40-46.
[8]陈杰,龚春英,陈家伟,等.两种风力机动态模拟方法的比较[J].电工技术学报,2012,27(12):79-85.CHEN Jie,GONG Chunying,CHEN Jiawei,et al.Comparative study of dynamic simulation methods of wind turbine[J].Transactions of China Electrotechnical Society,2012,27(12):79-85.
[9]郭鸿浩,周波,刘颖,等.基于负载转矩观测的风力机动静态特性模拟[J].中国电机工程学报,2013,33(27):145-153. GUO Honghao,ZHOU Bo,LIU Ying,et al.Static and dynamic behaviour emulation of wind turbine based on load torque observation[J].Proceedings of the CSEE,2013,33(27):145-153.
[10]ZHAO Haoran,WU Qiuwei,Claus Nygaard Rasmussen,et al. L1 adaptive speed control of a small wind energy conversion system for maximum power point tracking[J].IEEE Transactions on Energy Conversion,2014,3(29):576-583.
[11]邢作霞,陈雷,厉伟,等.减小塔影和风切变的变桨距控制方法研究[J].太阳能学报,2013,34(6):915-922. XING Zuoxia,CHEN Lei,LI Wei,et al.Pitch control method study on reducing the effects of tower shadow and wind shear[J]. Acta Energiae Solaris Sinica,2013,34(6):915-922.
[12]Iulian Munteanu,Antoneta Iuliana Bratcu,Nicolaos-Antonio Cutululis,et al.Optimal control of wind energy system[M]. London,Springer.2010:23-39.
[13]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008:40-102.
[14]Goran Mandic,Adel Nasiri,Eduard Muljadi,et al.Active torque control for gearbox load reduction in a variable-speed wind turbine[J].IEEE Transactions on Industry Applications,2012,48(6):2424-2432.
[15]刘其辉,谢孟丽.双馈式变速恒频风力发电机的空载及负载并网策略[J].电工技术学报,2012,27(10):60-78. LIU Qihui,XIE Mengli.Strategies of grid-connection of doublyfed variable-speed constant-frequency wind power generator with no-load and with load[J].Transactions of China Electrotechnical Society,2012,27(10):60-78.
[16]刁统山,王秀和,魏蓓.永磁双馈风力发电机的并网控制策略[J].电网技术,2013,37(8):2278-2283. DIAO Tongshan,WANG Xiuhe,WEI Bei.A grid-connection control strategy of permanent magnet doubly fed induction wind power generator[J].Power System Technology,2013,37(8):2278-2283.
[17]高剑,黄守道,张文娟,等.基于变流器控制策略的直驱永磁风力发电机优化设计[J].电工技术学报,2013,28(7):103-109. GAO Jian,HUANG Shoudao,ZHANG Wenjuan,et al.Optimal design for permanent magnet wind power generators based on converter controlling algorithm[J].Transactions of China Electrotechnical Society,2013,28(7):103-109.
(编辑:刘琳琳)
Imitation control strategy of grid-connected wind power system
YANG Jun-you, WANG Hai-xin, JING Yan-jun, XING Zuo-xia, CUI Jia
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China)
In order to research output characteristics of grid-connected wind power system and conduct research on wind power system in a laboratory,a new imitation control strategy of wind power system was proposed,and wind power generator was driven by a motor imitating wind turbine.Couple control of pitch controller and torque controller for speed was analyzed in the starting process.A variable gain PI controller was proposed to realize priority control for speed.Operation of permanent magnet wind power generator with grid voltage fault was analyzed to implement the imitation control strategy,and verified by simulation.Experimental platform was set up for double-fed wind power generator including control system,actuators and monitoring system.Torque output characteristics were successfully imitated,and parallel in the grid for double-fed wind power generator was realized.The correctness and reliability of imitation control strategy for wind power system were verified by experiments,which meets wind power system experimental requirements.
torque control;imitation of torque;pitch control;wind turbine;experimental platform
10.15938/j.emc.2016.03.007
TM 315
A
1007-449X(2016)03-0043-08
2014-05-03
国家能源应用技术研究及工程示范项目(NY20150303)
杨俊友(1963—),男,博士,教授,研究方向为新能源发电技术,特种电机及其控制等;
王海鑫(1989—),男,博士研究生,研究方向为风力发电并网控制技术;
井艳军(1982—),男,博士,讲师,研究方向为风力发电机组控制技术;
邢作霞(1976—),女,博士,副教授,研究方向为分布式能源发电技术;
崔嘉(1987—),男,博士研究生,研究方向为风电场无功控制。
王海鑫