幅值关联动态规划检测前跟踪算法
2016-10-13郭云飞赵尚宇
郭云飞,赵尚宇
幅值关联动态规划检测前跟踪算法
郭云飞,赵尚宇
( 杭州电子科技大学 通信信息传输与融合技术国防重点学科实验室,杭州 310018 )
针对超低信噪比条件下的弱小目标检测跟踪问题,本文提出一种新的动态规划检测前跟踪算法。首先,基于相邻帧的幅值关联函数,提出一种新的值函数构建方法,不仅考虑当前帧的幅值信息,还利用了相邻帧的幅值关联信息。其次,为解决新生目标或目标湮灭的情况,提出一种基于动态门限的遍历状态回溯算法。与同类算法的仿真分析说明,所提算法能有效提高超低信噪比条件下的弱小目标探测性能。
低可观测目标;检测前跟踪;动态规划;幅值关联;值函数
0 引 言
DP-TBD算法的核心问题是值函数的构建,值函数的选取直接影响DP-TBD算法的检测跟踪性能。目前,值函数的构建主要有两种方法:一种方法是利用目标幅值的先验信息,将似然函数作为值函数[4];另一种方法是利用当前帧目标幅值的测量值构造值函数[5]。文献[6]提出了统一的值函数递推公式。为了进一步改善DP-TBD算法的检测跟踪性能,文献[7]将粒子滤波引入DP-TBD,以解决非高斯杂波背景下的弱目标检测跟踪问题。文献[8]提出一种新的轨迹回溯方法,以同时检测和跟踪多个邻近目标。上述DP-TBD算法都是基于前两种方法构建值函数。为了进一步提高DP-TBD算法的检测跟踪性能,本文提出一种新的值函数构建方法。该方法利用目标幅值在相邻帧的变化连续性,通过在测量空间中求取相邻帧的幅值关联函数,构建值函数,进而在时间域进行能量积累,实现对低可观测目标的检测与跟踪。与传统算法相比,本文方法不需要目标幅值的先验信息,对目标幅值的测量不确定性鲁棒性强,能有效改善低可观测目标的检测跟踪性能。除此外,为解决新生目标(如远程目标进入探测区)或中途消失目标(如目标驶离探测区域)的检测跟踪问题,本文提出一种基于动态门限的遍历状态回溯算法,该算法在状态回溯过程中,对每一帧都进行状态回溯,且每一帧的门限都和该帧最大值函数相关,从而有效的估计目标起始和终结时刻。仿真分析表明,所提方法能有效处理超低信噪比条件下弱目标的检测跟踪问题。
本文剩余部分结构如下:第一节对TBD问题进行数学描述;第二节在介绍DP-TBD算法的基本原理基础上,提出基于幅值关联的DP-TBD算法(Amplitude Association DP-TBD,AADP-TBD);第三节仿真分析和比较所提算法的性能;第四节是结论。
1 问题描述
在实际应用中,为了降低传感器数据处理系统的计算量及存储负担,对式(1)的幅值输出通常进行低门限检波处理,并将所有幅值低于检波门限的分辨单元输出置零。因此,经过检波处理的传感器在第时刻输出的测量个数小于分辨单元总数。
2 幅值关联动态规划算法
2.1 DP-TBD基本原理
DP-TBD算法的核心思想是在测量空间,沿着目标轨迹对阶段指标函数进行积累,将产生最大的值函数。因此,该算法的基本原理就是遍历第帧的每一个候选状态,对每一个候选状态,在其状态转移范围内寻找第帧中最大的值函数进行积累。如果沿着某条路径积累的值函数超过了设定阈值,则宣布目标被检测到,且该值函数对应的状态时间序列为目标轨迹。
2.2 基于幅值关联函数的值函数
基于目标幅值先验信息的值函数方法受限于幅值先验信息是否可获取[4],基于目标幅值测量值的值函数构建方法[5,11-12]在信噪比过低时(如SNR<3 dB),虚假航迹率上升,检测性能下降[6]。为了进一步改善检测跟踪性能,本文提出一种新的值函数构建方法。该方法的基本思想是利用相邻帧的幅值测量值的2-范数建立幅值关联函数,将其与当前帧的幅值测量值的乘积作为阶段指标函数,进而积累得到值函数。
2.3 AADP-TBD算法
根据第2.2节提出的值函数构建方法,并考虑低可观测目标的航迹起始和终结问题,提出基于动态门限的遍历状态回溯算法。
Step1:初始化
Step2:确定状态转移范围
Step3:确定阶段指标函数和值函数
Step4:基于动态门限的遍历状态回溯算法
Step5:航迹后处理
为了降低虚假航迹率,选择“/”航迹维持逻辑对全体估计状态时间序列进行短航迹剔除[13]。
同时,利用航迹段关联算法[14]提高航迹连续性。
3 仿真分析
本节分别通过单目标和多目标两个仿真场景,对所提AADP-TBD算法和传统的两个算法(基于幅值先验信息的DP-TBD算法、基于幅值测量值的DP-TBD算法)进行性能比较,并深入分析了不同信噪比对所提算法的性能影响,以下分析使用MATLAB软件仿真。
仿真场景1:
传感器探测区域为1 000 m´1 000 m,分辨单元大小为1 m´1 m,采样间隔为1 s,积累时间为10 s。某Swerling-I型目标,初始状态为,做匀速直线运动,幅值服从参数为的瑞利分布。信噪比为9 dB时的10帧原始数据如图1所示。

图1 SNR=9 dB 场景1 前10 帧量测数据
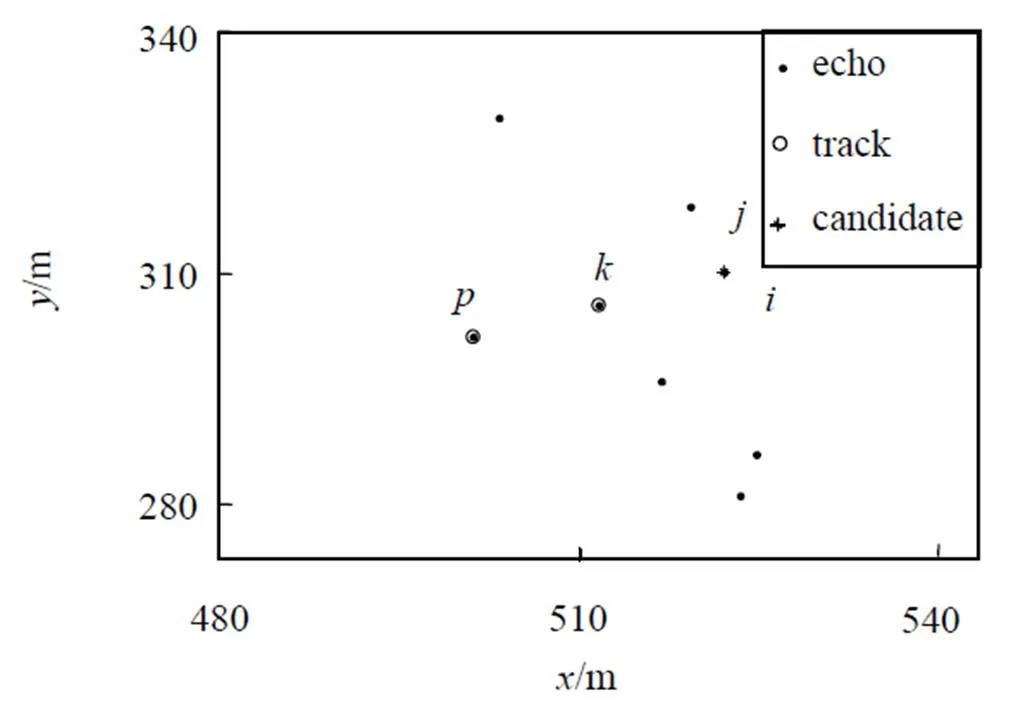
图2 候选状态选取分析
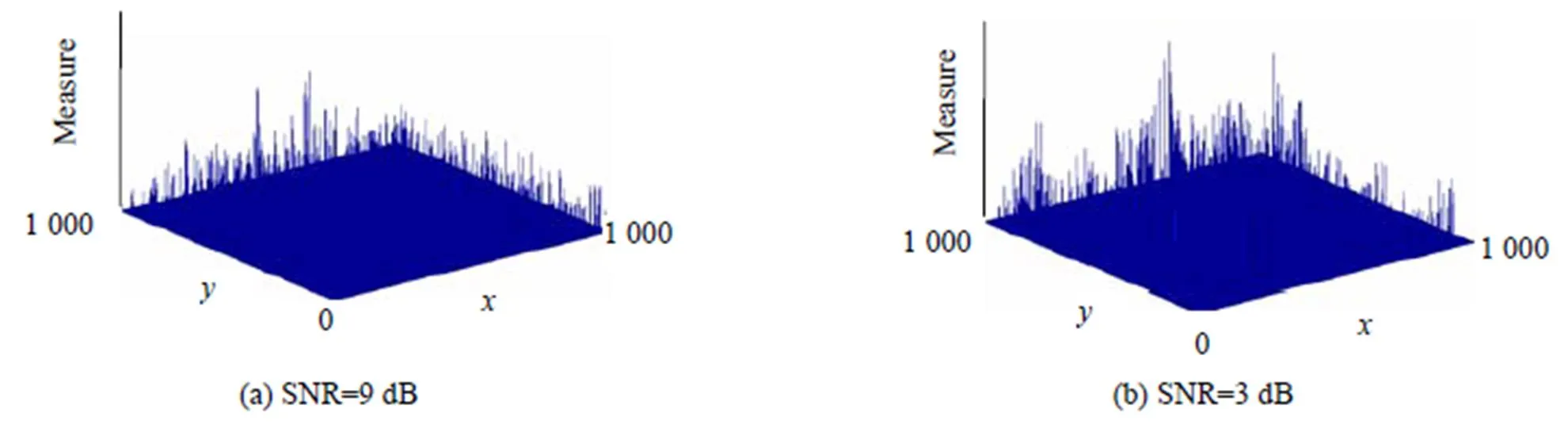
图 3 SNR=9 dB 和SNR=3 dB 原始测量数据

图 4 SNR=9 dB 三种方法积累的值函数比较
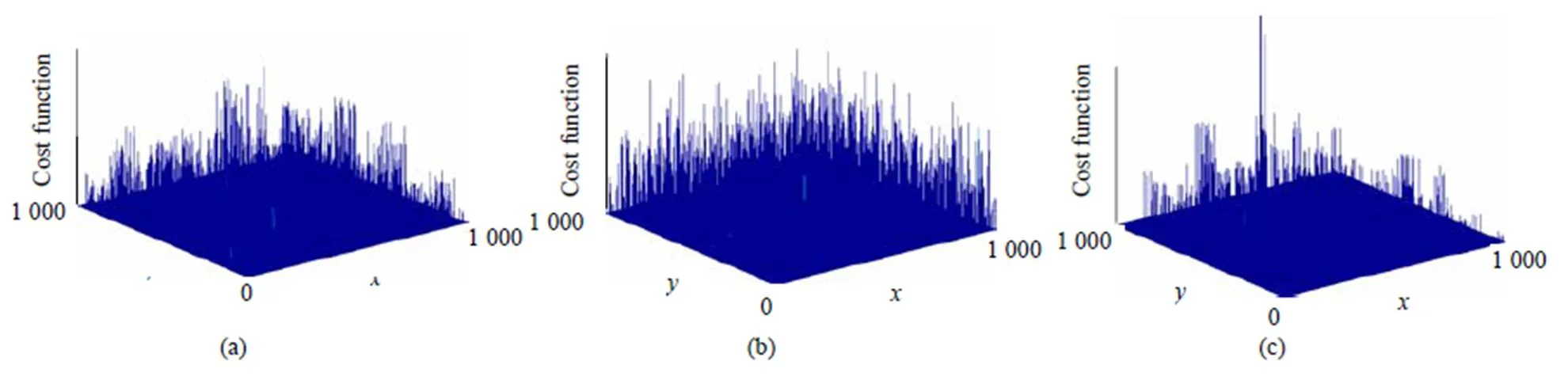
图 5 SNR=3 dB 三种方法积累的值函数比较
从图4可以看出,在高信噪比条件下,三种DP-TBD算法均取得了令人满意的积累性能。
图5(a)~(c)可看出,随着信噪比进一步下降,在前两种方法中沿目标航迹进行积累的值函数已不是最大值,而本文所提方法仍能有效找到目标路径。检测概率定义为目标出现且其航迹被检测到的概率[5]。本文中,目标估计状态如果满足式(8),则被认为目标航迹点被检测,其中为允许位置误差
航迹虚警率定义为虚假航迹被错误接受的概率[5],本文中的计算公式如下:
图6给出了100次Monte Carlo仿真条件下,三种算法的检测概率随不同信噪比变化的曲线。由图可以看出,如果检测概率要求达到50%,在信噪比最低需求上,本文所提方法比前两种算法有2~3 dB的性能改善。当信噪比大于9 dB时,本文所提算法的检测性能接近基于幅值测量值的DP-TBD方法,优于基于幅值先验信息的DP-TBD方法。
图6 不同信噪比下三种算法的检测概率
图7给出了100次Monte Carlo仿真条件下,其他条件相同,选取不同动态门限缩放因子得到的检测概率和航迹虚警率的曲线图。由图可以看出,在一定范围内降低动态门限缩放因子可以提高检测概率,但同时也会使航迹虚假率升高。此时,配合短航迹剔除模块,如图8,可以剔除虚假航迹,能在一定程度上降低航迹虚警率。
图7 不同信噪比下,不同动态门限的检测概率(a)和航迹虚假率(b)
图8 未经航迹剔除(a)和经过航迹剔除(b)的跟踪效果图
仿真场景2:
第一个目标参数同场景1,第二个目标在第3 s进入探测区域,初始状态为[0 m,20 m/s,900 m,20 m/s]T,同样做匀速直线运动,在第8 s离开探测区域。第二个目标也是Swerling-I型,幅值分布同第一个目标。信噪比为9 dB时的前10帧原始数据如图9所示。图10给出了100次Monte Carlo仿真次数下,不同信噪比时,两个目标利用三种算法的检测概率,可以看出,当检测概率要求达到50%时,本文所提方法比其它两种方法取得了2 dB~3 dB的信噪比增益。
图 9 SNR=9 dB 场景2 前10 帧量测数据

图10 不同信噪比第一个目标和第二个目标检测概率
表1统计了100次Monte Carlo仿真次数下,三种算法在不同信噪比条件下,对第二个目标的平均起始帧、平均终止帧的比较以及单次运行平均耗时。第二个目标的真实出现时间是3 s~8 s,从表1可以看出,相同信噪比条件下,所提方法对目标出现时间的估计更接近真实值;随着信噪比降低,同一算法对目标出现时间的估计准确性总体呈下降趋势。三种算法的单次运行时间基本相同。
表1 不同信噪比下三种算法性能比较
Table 1 Performance Comparison of three methods under different SNRs

4 结 论
本文针对低可观测目标的检测跟踪问题,提出一种新的动态规划检测前跟踪算法。该算法利用相邻帧的幅值关联信息构建值函数,并采用基于动态门限的遍历状态回溯算法估计目标的出现和终止时刻。与传统算法相比,本文所提算法在处理超低信噪比条件下的弱小目标检测性能上具有明显优势。如果系统要求检测概率达到50%,则所提方法能够获取2 dB~3 dB的信噪比增益。
[1] Moyer L R,Spak J,Lamanna P. A Multi-Dimensional Hough Transform-Based Track-Before-Detect Technique for Detecting Weak Targets in Strong Clutter Backgrounds [J]. IEEE Transactions on Aerospace and Electronic Systems(S0018-9251),2011,47(4):3062-3068.
[2] 陈延军,梁新华,潘泉,等. 两级量测更新的粒子滤波检测前跟踪算法 [J]. 传感技术学报,2015,28(1):115-120.
CHEN Yanjun,LIANG Xinhua,PAN Quan,. A Particle Filter Track-Before-Detect Algorithm Base on Two-Stage Measurement Update [J]. Chinese Journal of Sensors and Actuators,2015,28(1):115-120.
[3] 万洋,王首勇,吴卫华. 机动弱小目标动态规划检测前跟踪方法 [J]. 信号处理,2013,29(5):584-590.
WAN Yang,WANG Shouyong,WU Weihua. Dynamic Programming Track Before Detect for Maneuvering Dim Targets [J]. Journal of Signal Processing,2013,29(5):584-590.
[4] Barniv Y. Dynamic Programming Solution for Detecting Dim Moving Target [J]. IEEE Transactions on Aerospace and Electronic Systems(S0018-9251),1985,21(1):144-156.
[5] Tonissen S M,Evans R J. Performance of Dynamic Programming Techniques for Track-Before-Detect [J]. IEEE Transactions on Aerospace and Electronic Systems(S0018-9251),1996,32(4):1440-1451.
[6] 强勇,焦李成,保铮. 动态规划算法进行弱目标检测的机理研究 [J]. 电子信息学报,2003,25(6):721-727.
QIANG Yong,JIAO Licheng,BAO Zheng. Study on Mechanism of Dynamic Programming Algorithm for Dim Target Detect [J]. Journal of Electronics and Information Technology,2003,25(6):721-727.
[7] 郑岱堃,王首勇,杨军. 一种适用于非高斯杂波背景的DP-TBD算法 [J]. 雷达科学与技术,2011,9(6):561-567.
ZHENG Daikun,WANG Shouyong,YANG Jun. A Dynamic Programming Track Before Detect [J]. Radar Science and Technology,2011,9(6):561-567.
[8] Grossi E,Lops M,Venturino L. A Track-Before-Detect Algorithm with Thresholded Observations and Closely-Spaced Targets [J]. IEEE Signal Processing Letters(S1070-9908),2013,20(12):1171-1174.
[9] 谭晓宇,陈谋,姜长生. 改进动态规划算法在小目标检测中的应用 [J]. 光电工程,2008,35(5):23-27.
TAN Xiaoyu,CHEN Mou,JIANG Changsheng. Applications of Improved Dynamic Programming Algorithm in Small Targets Detect [J]. Opto-Electronic Engineering,2008,35(5):23-27.
[10] Grossi E,Lops M,Venturino L. A Heuristic Algorithm for Track-Before-Detect With Thresholded Observations in Radar Systems [J]. IEEE Signal Processing Letters(S1070-9908),2013,20(8):811-814.
[11] 李涛,吴嗣亮,曾海彬,等. 基于动态规划的雷达检测前跟踪新算法 [J]. 电子学报,2008,36(9):1824-1828.
LI Tao,WU Siliang,ZENG Haibin,. A New Radar Track-Before-Detect Algorithm Based on Dynamic Programming [J]. Acta Electronica Sinica,2008,36(9):1824-1828.
[12] Grossi E,Lops M,Venturino L. A Novel Dynamic Programming Algorithm for Track-Before-Detect in Radar Systems [J]. IEEE Transactions on Signal Processing(S1053-587X),2013,61(10):2608-2619.
[13] Shalom Y B,Chang K C,Shertukde H M. Performance Evaluation of a Cascaded Logic for Track Formation in Clutter [J]. IEEE Transactions on Aerospace and Electronic Systems(S0018-9251),1989,25(6):873-878.
[14] 刘颢,陈世友,王学东,等. 一种自适应航迹关联算法 [J]. 电子学报,2013,41(12):2416-2421.
LIU Hao,CHEN Shiyou,WANG Xuedong,. An Adaptive Track Correlation Algorithm [J]. Acta Electronica Sinica,2013,41(12):2416-2421.
An Amplitude Association Dynamic Programming Track Before Detect Algorithm
GUO Yunfei,ZHAO Shangyu
( Key Laboratory of Fundamental Science for National Defense-Communication Information Transmission and Fusion Technology, Hangzhou Dianzi University, Hangzhou 310018, China )
In order to detect and track low signal-to-noise ratio target, a new track before detect algorithm based on dynamic programming is proposed. The contributions consist of two aspects. Firstly, a new cost function method is proposed. It uses not only the measured amplitude information at current frame, but also uses amplitude association information between two consecutive frames. Secondly, an ergodic state backtracking algorithm with variable threshold is presented to detect new-born or vanished targets during the observation. Simulation results show the proposed algorithm effectiveness in detection performance.
low observable targets; track before detect; dynamic programming; amplitude association; cost function
TN953
A
10.3969/j.issn.1003-501X.2016.05.012
2015-07-23;
2015-11-23
郭云飞(1978-),男(汉族),河北邯郸人。副教授,博士,主要研究工作是:目标跟踪,目标检测,信息融合等。
E-mail:gyf@hdu.edu.cn。
赵尚宇(1990-),男(汉族),河南开封人。硕士研究生,主要研究工作是:检测前跟踪,动态规划等。E-mail:cruise_hz@163.com。