折反式长波线阵红外传感器装调技术
2016-10-10左晓舟沈良吉杨海成惠刚阳刘伟光
左晓舟,沈良吉,杨海成,惠刚阳,刘伟光,姜 峰,赵 玮
折反式长波线阵红外传感器装调技术
左晓舟,沈良吉,杨海成,惠刚阳,刘伟光,姜 峰,赵 玮
( 西安应用光学研究所,西安 710065 )
针对折反式长波线阵红外传感器的探测距离远、大口径小焦比、无法凝视成像等结构特点与使用要求,提出了一种高精度、流程化、参量化的装调技术,首先保证主反射镜装调后的面型精度,利用准直光管与三坐标测量机严格量化控制主、次镜之间的光学间隔,然后通过波像差测试手段对主、次镜的相对倾斜与径向偏移进行调校;再利用基准转换的方法,保证主、次镜系统与中继镜组光轴一致;最后装配线阵探测器,利用周扫工装反射镜,进行像面与光轴的调校。文中介绍了装调过程中采用的非球面激光定心、微应力粘接装配、中空主次镜光学间隔调校、中继镜“逐片”定心、线阵探测器周视装调等关键技术,结果表明:运用该技术装调后,探测器MDTD可达到4 K,外场探测距离可达60 km以上,满足设计指标要求。
装调;红外传感器;波像差;光学间隔;中心偏差
0 引 言
基于无源被动探测的红外远程预警探测系统,是在光电成像、光机扫描、弱小目标检测等技术基础上发展起来的一种新型防空探测系统。该系统具备更高的搜索效率和更远的探测距离,可在全天时情况下提供大视场、高分辨的全景周视搜索图像,对远程全空域范围进行搜索并对目标实施探测、跟踪和目标威胁告警。
为了保证较高的红外辐射接收能力和角分辨力,该型系统前端均需配备大口径、长波段、小F数的红外光学系统。而折反式长波红外光学系统综合了透射式系统F数小与同轴反射式系统透过率高、重量轻的优势,很适合运用于远程红外预警探测系统中。相较于普通热像仪,折反式长波线阵红外传感器对装调精度提出了更高的要求,需要对卡赛格林反射式物镜系统、中继成像系统、线阵探测器等分别进行严格的过程控制,同时考虑各环节之间的集成与联调。本文介绍了一种高精度、流程化、参量化的折反式长波线阵红外传感器装调技术,并对其涉及的各项关键技术进行了阐述,最终保证红外传感器系统各项指标满足设计要求。
1 装调技术原理
图1所示为折反式长波红外传感器的光机结构示意图,抛物面主反射镜与双曲面次反射镜构成卡赛格林反射式物镜系统,一次像面通过中继透镜后成像于线阵探测器上。

图1 长波红外传感器示意图
通过Zemax分析,卡赛格林物镜组对传感器系统的像差贡献权重最大,其中主反射镜的焦比达到0.73,且具有较高的非球面度,对中心偏差与光学间隔误差都极其敏感,需要在装调时进行严格的控制[1],同时中继镜组组合光轴与主、次镜系统光轴的偏心误差也会对像质带来影响。表1、表2分别给出了主反射镜的偏心误差以及中继镜组相对主、次镜的偏心误差对系统成像质量的影响分析。
表1 主反射镜偏心误差对系统波前误差与MTF 的影响
Table 1 Effect of primary-mirror's centering errors on wavefront and MTF
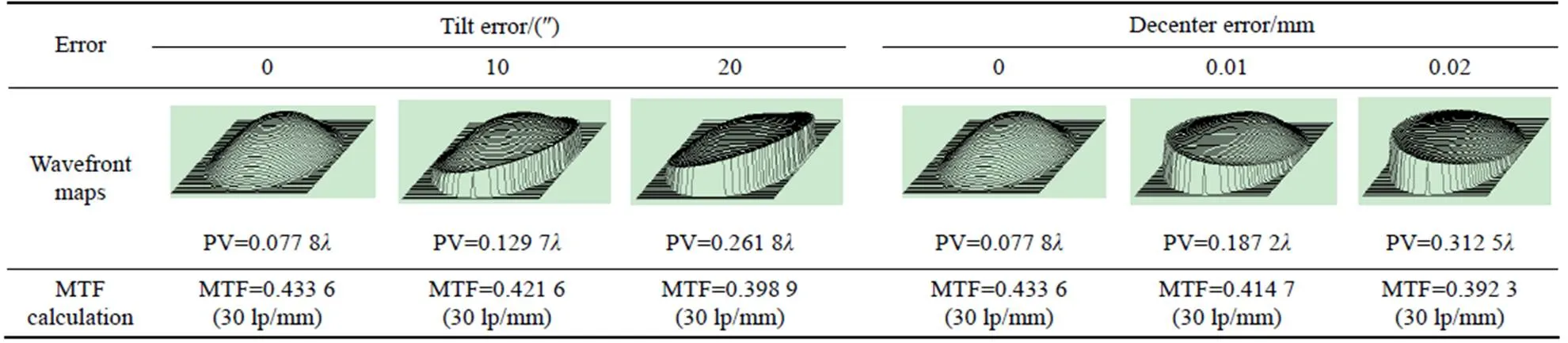
表2 中继镜组偏心误差对系统波前误差与MTF 的影响
Table 2 Effect of relay lens's centering errors on wavefront and MTF
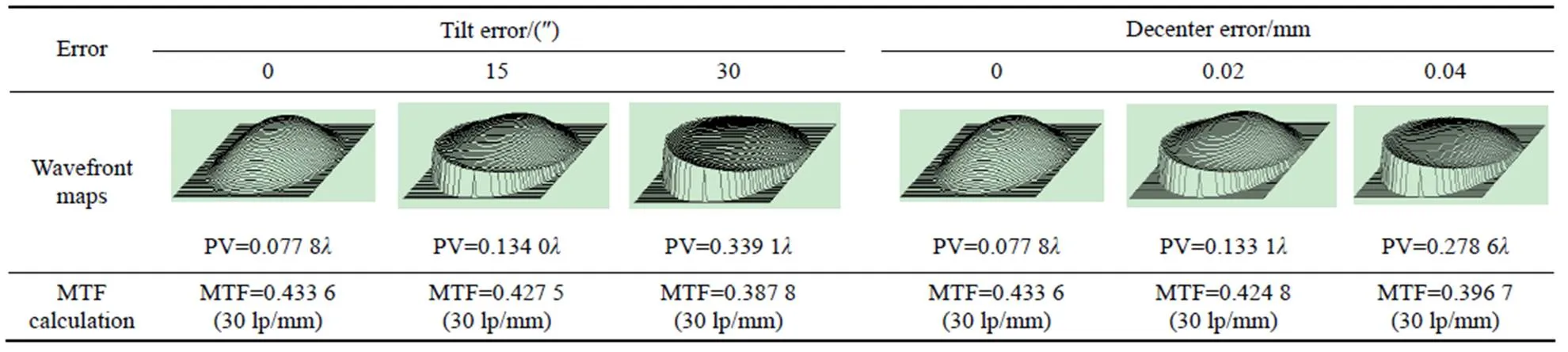
从表中可看出,主镜的倾斜误差达到20″、平移误差达到0.02 mm时,系统的波前误差PV值由0.077 8上升至/4以上,MTF也由衍射极限下降了9.5%;而相对于主镜,中继镜组对偏心误差的允差较宽松,可适当依靠金工基准件的加工精度保证。
根据产品的结构特点与上述分析,制定了卡赛格林式长波红外线阵传感器的装调工艺流程,见图2。首先以主镜光轴为基准,保证主镜组件中的外圆基准与光轴重合、端面基准与光轴垂直;其次进行主次镜的集成装配,利用三坐标测量仪精确保证主次镜之间的光学间隔;然后在zygo干涉仪测试主、次镜系统的波像差[2],对主、次镜之间的中心偏差进行严格校正,由于产品工作在长波红外波段,因此设计了专用可见光波段工装镜头,实现波像差的准确测试。中继镜组分别采用“逐片定心”的工艺方法,保证其光轴与中继镜筒机械基准之间的形位公差,通过基准转换,保证主次镜系统与中继镜组光轴一致。最后装配线阵探测器,利用周扫工装反射镜,进行像面与光轴的调校。

图2 装调工艺流程图
2 装调工艺过程
2.1 主镜的微应力定心装调
主反射镜为φ279 mm抛物面镜,焦比达到0.73,且具有较高的非球面度,装调后的面型精度及中心偏差均会对系统成像质量带来较大的影响[3]。主镜组件的光机结构如图3所示。
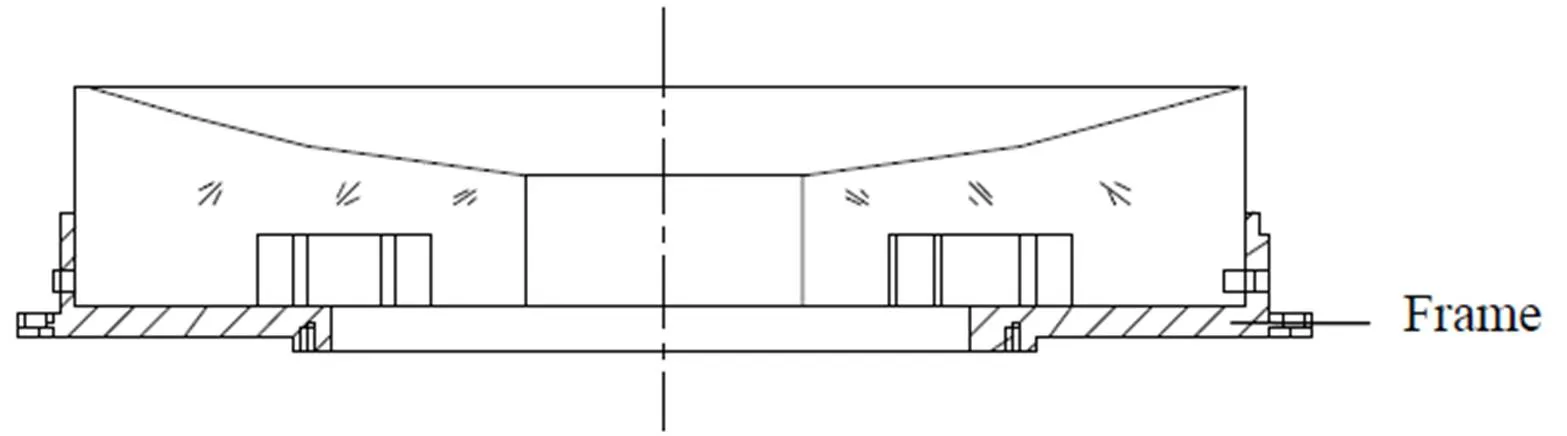
图3 主反射镜组件示意图
对于非球面镜而言,传统的球心反射像定心法无法找到非球面元件真正的光轴——回转对称轴[4],为了提高主镜的装配定心精度,采用了激光定心的方法,保证主镜光轴与主镜框基准的形位公差,为后续的装调提供基准。
为了避免主镜镜面与金工件直接接触带来的局部应力集中,结构上采用了胶粘固定的安装方式。粘接装配时需要优化考虑粘接厚度、具体粘接位置以及粘接范围,确保产品在满足冲击试验下强度要求的同时,在粘接剂固化以及温度变化过程中对主镜带来较小的应力,尽可能的减小装配对主镜面型精度的影响。
两零件粘接面所能承受的冲击加速度[5]为
其中:为粘接面的面积;为粘接剂的抗剪强度;为被粘接件的质量;为安全系数,金工件与光学件粘接时该值取4。根据产品制造与验收规范中规定的冲击加速度要求,可以得出主反射镜粘接所需的最小粘接面积。
当温度变化时,为使光学件内产生零应力状态,光学件与金工件之间的最佳粘合剂厚度为[6]
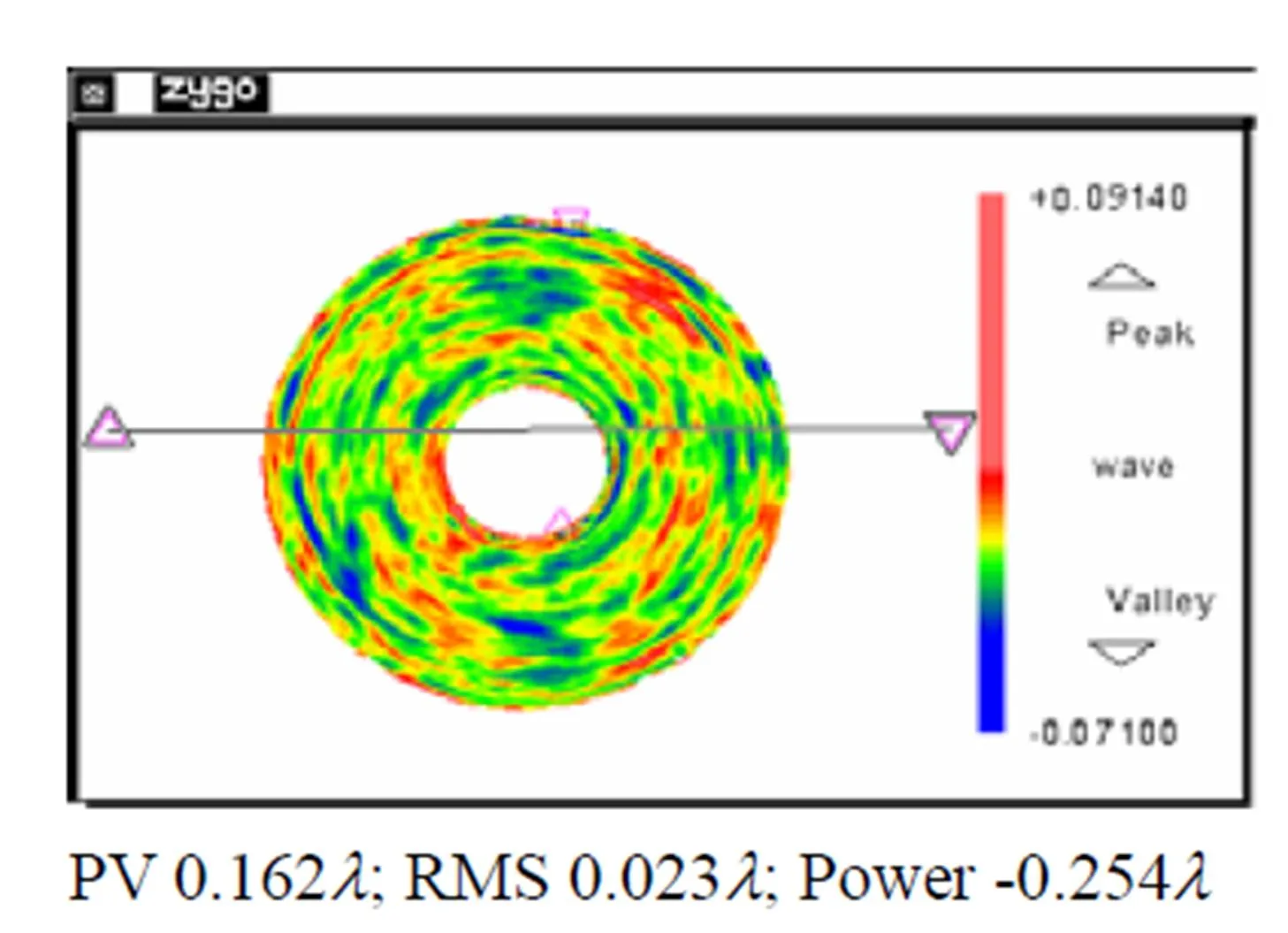
图4 主反射镜粘接固化后的面型检测结果
2.2 光学间隔的精确测量与调整
主、次镜的光学间隔直接影响着系统的焦距,也决定着成像面与探测器的轴向装配位置,必须精确控制。由于传感器镜筒具有一定的深度,且主反射镜为中空结构,当主、次镜集成组装后,无法运用传统的工艺方法对主、次镜之间的光学间隔进行测量,为此,我们巧妙借用了中心偏测量仪的准直光管[7]与三坐标测量机对该光学间隔进行测量控制。
如图5所示,首先利用中心偏测量仪的表面像自准原理测量出图示的尺寸1,然后利用三坐标测量机测量镜面某一基准点至主镜中心轴的横向距离,将该值代入主镜的非球面方程中:
得到测量点的失高,进而得到主镜中空顶点至镜框基准面的距离,由:

图5 光学间隔测量示意图
2.3 主、次镜系统的波像差装调
主、次镜系统本身存在残余像差,因此设计了专用的可见光波段工装镜组,对主、次镜与工装镜组构成的系统用Zygo干涉仪进行波像差的测试与装调。为了使光学系统的波像差最小,原则上Zernike多项式的系数数值的绝对值越小越好,考虑到镜子的加工误差,Zernike多项式的系数绝对值有极小值,由于Zernike多项式本身的正交特性很容易和光学元件的装调位置误差联系起来,因此观察分析Zernike多项式的系数的相对变化,就可以找到调校方向,同时结合光学系统的公差分析可以确定调校量值的大小。Zernike多项式前九项所代表的像差意义如表3所示。
表3 Zernike 系数与初级像差
Table 3 Zernike coefficient and primary aberration

主、次镜之间的光学间隔经过装调已经满足设计要求,因此系统的球差很小,需要通过三维调整机构调整次镜相对于主镜的径向平移与倾斜,对彗差与像散进行控制。图6所示为主、次镜系统装调后的波像差检测结果,PV与RMS值在中心波长为632.8 nm时分别为0.97与0.17,该传感器工作在8 μm~10 μm的红外波段,经过换算,系统波像差远远满足瑞利判据的要求[8]。

图6 主、次镜系统波像差检测结果
2.4 中继镜组的逐片定心装调
通过前述的分析可知,中继镜组与主、次镜的组合光轴偏心误差也会对传感器的成像质量带来影响,需要对中继镜组中各光学镜片的中心偏差进行控制。由于中继透镜是红外材料,无法使用反射式定心的方法,因此通过光学加工工艺在定心磨边时保证中继透镜凹面一侧平台与透镜光轴垂直[9],装调定心时逐片将透镜以平台为基准装入镜框,镜框与主镜镜框建立统一的机械基准,通过调校控制透镜的平移误差,依次保证各中继透镜装入后光轴的一致性[10]。图7所示为中继镜组“逐片定心”的示意图。

图7 中继镜组“逐片定心”
2.5 线阵探测器的装调
由于该传感器采用长波576×4线阵列探测器作为成像器件,无法凝视成像,因此,在调校像面及光轴时,可借助周扫工装反射镜。首先利用标准直角棱镜、自准直前置镜、红外平行光管与可调转台对产品的零位进行装调,然后分别用工装反射镜与产品替换棱镜与前置镜,并保证位置基准一致,启动周视转台,使其作周扫运动,通过调整转台的扫描转速,保证转速与线阵列探测器的积分时间相匹配。装配并调整探测器的位置,使成像最清晰,同时保证红外平行光管的光轴中心与图像的十字中心重合。
3 装调结果
在实验室环境下以10 cy/mrad的点源靶标检测红外传感器的MDTD(最小可探测温差)指标,MDTD约为4K。外场跟飞试验中,在能见度≥20 km,相对湿度≤60%的良好天气情况下,该红外传感器对飞行高度大于2 000 m的歼8飞机探测距离可达60 km,对飞行高度大于100 m的Ⅱ-150型靶机探测距离可达15 km,基本满足指标要求。图8为系统输出的外场周视成像图。

图8 外场成像图景
4 总 结
折反式长波线阵红外传感器装调技术是一种流程化、参量控制的装调工艺方法,对传统的光学系统装调工艺进行了优化,采用非球面激光定心、微应力粘接装配、中空主次镜光学间隔调校、中继镜“逐片”定心、线阵探测器周视装调等关键技术,保证了红外传感器的各项技术指标,使其在远距离环扫预警探测系统中有效地发挥了作用。该装调技术以及其中的一些关键技术点也可应用于可见光波段反射式、折反式光学成像系统的装调过程中。
[1] 董续勇,李辛,周凤利,等. 小F数卡赛格林系统装调技术 [J]. 红外与激光工程,2011,40(9):1730-1733.
DONG Xuyong,LI Xin,ZHOU Fengli,. Alignment technology of the Cassegrain reflector with small F-number [J]. Infrared and Laser Engineering,2011,40(9):1730-1733.
[2] 范俊玲. 大口径非球面检测方法研究 [D]. 哈尔滨:哈尔滨工业大学,2007:21-22.
FAN Junling. The research on the testing methods of large aperture aspheric mirror [D]. Harbin:Harbin Institute of Thchnology,2007:21-22.
[3] 韩娟,段嘉友,张钧. 大口径非球面主反射镜的装调方法研究 [J]. 应用光学,2012,33(3):490-495.
HAN Juan,DUAN Jiayou,ZHANG Jun. Alignment mrthod for large aperture aspheric mirror [J]. Journal of Applied Optics,2012,33(3):490-495.
[4] 陈钦芳. 抛物面反射镜光轴的确定 [J]. 应用光学,2008,29(2):225-229.
CHEN Qinfang. Alignment for optical axis of parabolic mirror [J]. Journal of Applied Optics,2008,29(2):225-229.
[5] 姜峰,白波,张锦亮,等. 光电稳瞄系统装调的关键技术 [J]. 应用光学,2007,28(2):156-158.
JIANG Feng,BAI Bo,ZHANG Jinliang,. Integration technology of stabilized slsctro-optical sight system [J]. Journal of Applied optics,2007,28(2):156-158.
[6] Paul R,Yoder Jr. 光机系统设计 [M]. 北京:机械工业出版社,2013:756-757.
Paul R,Yoder Jr. Opto-Mechanical System Design [M]. Beijing:China Machine Press,2013:756-757.
[7] 高志荣. 高精度中心偏测量仪的设计和使用 [J]. 光电工程,1983,10(3):40-48.
GAO Zhirong. The design and use of high precision off-center measurement system [J]. Opto-Electronic Engineering,1983,10(3):40-48.
[8] 张以谟. 应用光学:3版 [M]. 北京:电子工业出版社,2008:659-660.
ZHANG Yimo. Applied Optics:3rd ed [M]. Beijing:Publishing House of Electronics Industry,2008:659-660.
[9] 董时. 光定心加工及装配技术研究 [D]. 长春:长春理工大学,2012:22-23.
DONG Shi. The research on optical alignment machining and assembly technology [D]. Changchun:Changchun University of Science and Technology,2012:22-23.
[10] 左晓舟,姜峰,张燕,等. 高精密标准镜头定心装调技术研究 [J]. 应用光学,2014,35(6):1035-1039.
ZUO Xiaozhou,JIANG Feng,ZHANG Yan,. Study on Centering Alignment technology of High-Precision Standard Lens [J]. Journal of Applied Optics,2014,35(6):1035-1039.
Alignment Technology of Catadioptric Linear Array LWIR Sensor
ZUO Xiaozhou,SHEN Liangji,YANG Haicheng,HUI Gangyang,LIU Weiguang,JIANG Feng,ZHAO Wei
( Xi'an Institute of Applied Optics, Xi'an 710065, China )
A high-accuracy, standardize alignment technology is brought up, to adapt to the features and requirements of catadioptric linear array LWIR sensor, which are far-reaching, small F-number, and unable to staring imaged. The technique guarantees the accuracy of surface after alignment in the first place by using collimator and CMM which strictly controls the optical interval between the primary and secondary mirror, and then introduces wave front aberration measurement to adjust the tilt-errors and shift-errors of the primary and secondary mirror. After that, the method of reference conversion is adopted to line up the optical axis of the primary and secondary mirror and relay lens. At last, a linear detector is adopted to make adjustments to image and optical axis by using mirror. The paper introduces the key techniques in the alignment process such as centering by laser, microstress bond, alignment of the optical interval between the primary and secondary mirror, alignment for each lens, linear detector alignment etc. The results indicate that by introducing these technologies, the MDTD of the sensors can reach as high as 4 K, and the outdoor detection distance is more than 60 km. All the parameters meet design requirements.
alignment; infrared sensor; wave front aberration; optical interval; centering errors
TN206
A
10.3969/j.issn.1003-501X.2016.05.014
2015-07-28;
2015-10-13
左晓舟(1985-),男(汉族),陕西延安人。工程师,硕士,主要从事光电仪器光机装调工艺研究工作。E-mail:27149993@qq.com。