永磁同步电机无传感器矢量控制系统设计*
2016-10-13张云亮张兆旭曹永军赵玫
张云亮 张兆旭 曹永军 赵玫
Zhang Yunliang1 Zhang Zhaoxu2 Cao Yongjun3,4 Zhao Mei2
永磁同步电机无传感器矢量控制系统设计*
张云亮1张兆旭2曹永军3,4赵玫2
(1.威海广泰空港设备股份有限公司 2.鲁东大学信息与电气工程学院 3.广东省自动化研究所 广东省现代控制技术重点实验室 4.华南智能机器人创新研究院)
永磁同步电机是一个强耦合的多变量系统。设计一个永磁同步电机无传感器矢量控制系统,首先,通过坐标变换将定子电流解耦,构建电流PI调节器进行电流闭环控制,并采用矢量脉宽调制技术对电机进行调速;其次,采用转子磁场定向控制策略,利用滑模观测器对转子位置进行估算,并计算出电机转速,设计转速PI调节器,进而形成双闭环控制系统;最后,通过实验分析,该系统运行比较稳定,且具有良好的转速响应,成功实现了矢量控制策略。
永磁同步电机;矢量控制;滑模观测器;转子磁场定向控制;空间矢量脉宽调制
0 绪论
随着永磁材料、电力电子技术以及数字信号处理器的发展,永磁同步电机逐渐广泛应用于各个工业领域[1]。交流电机与直流电机控制方式不同,交流电机励磁电流分量与转矩电流分量存在耦合,矢量控制[2](也称为磁场定向控制)的目标就是对交流电机进行解耦控制,其基本思想是,通过矢量变换使交流电机控制方式类似于直流电机的控制方式[3],并拥有与直流电机控制系统相同的优点。
随着无传感技术的发展,其在电机控制系统中的应用越来越广泛。结合滑模变结构控制,本文利用反电势对转子位置进行估算,不仅可以降低控制系统的开发成本,还提高了电机控制系统在恶劣环境下的稳定性。
1 坐标变换与空间矢量
本文通过Clarke变换将三相定子电流轴系转化为两相正交静止坐标系(轴系);通过Park变换将轴系转化为两相正交旋转坐标系(轴系),使三相定子电流分解为转子励磁电流分量和转矩电流分量,实现解耦。进而采取控制策略分别对两电流分量进行控制,达到了矢量控制策略的目标。
永磁同步电机(permanent magnet synchronous motor,PMSM)的三相定子轴系在空间上相差120°,定义3个定子电流空间矢量:
按照空间矢量合成不变的原则[3],经过Clarke变换可得
经过Park变换,可得
本文矢量控制采用转子磁场定向的控制策略,将直轴(轴)建立在转子磁通位置处,交轴(轴)就落在了与转子磁通夹角为90°的位置处。将实际电机的转子磁链矢量作为轴系坐标的轴,则在轴上的分量就是励磁分量,在轴上的分量就是转矩分量。通过上述分析,只要能够实时检测转子磁通的位置即可实现转子磁场定向控制[4]。
当电机的转速较快时,感应电势相对于定子电阻压降较大,因此可以忽略定子电阻压降,由此可得电压近似方程
将式(5)进行欧拉变换可得到
将式(6)代入式(5)可得
通过分析可以得出,6个基本空间矢量如图1所示。这6个基本矢量可以合成圆周内的任何一个矢量。
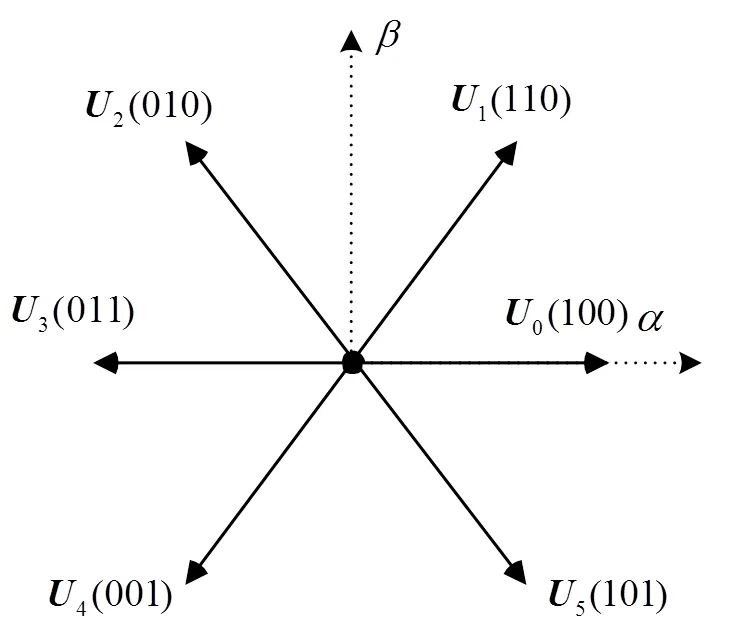
图1 基本空间电压矢量
2 基于滑模变结构的转子位置估算
滑动模态运动简图如图2所示,S()=0为切换面,S()称为切换函数[5]。切换面将空间分为S()>0和S()<0两部分。通过设置切换函数,可将状态轨线稳定在切换线上,并向原点滑动。
由于受到控制系统时间滞后和系统延迟等因素的影响,系统会在滑模面上出现抖动现象[6]。为削弱这种现象,引入饱和函数控制,在滑模控制的基础上引入一个边界层,如图2所示。当运动轨迹在该邻域之外时,采用的是滑模切换控制,否则采用连续控制,这样在一定程度上能够削弱抖动现象。
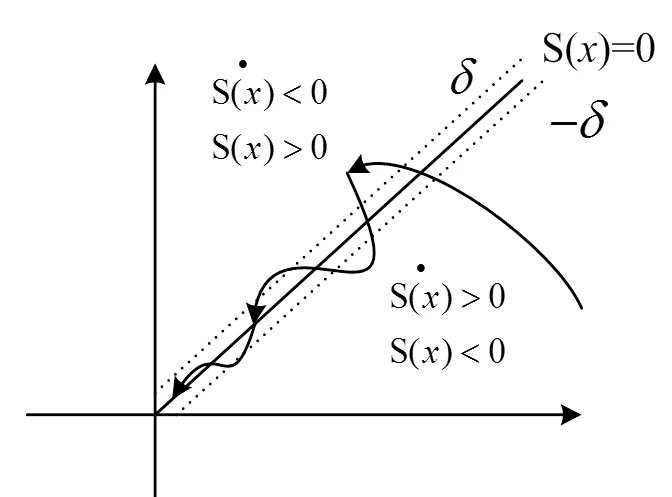
图2 滑动模态运动简图
利用采样电路对交流电机定子侧的相电压进行采集时,受硬件电路的影响较大,而且当电机转速比较低时定子相电压比较低,测量误差比较大[7]。本文采用相电压重构方法,利用直流母线电压和逆变器电子器件的通断作为条件,对定子相电压进行估计[8]。
三相定子电压计算公式可以表示为
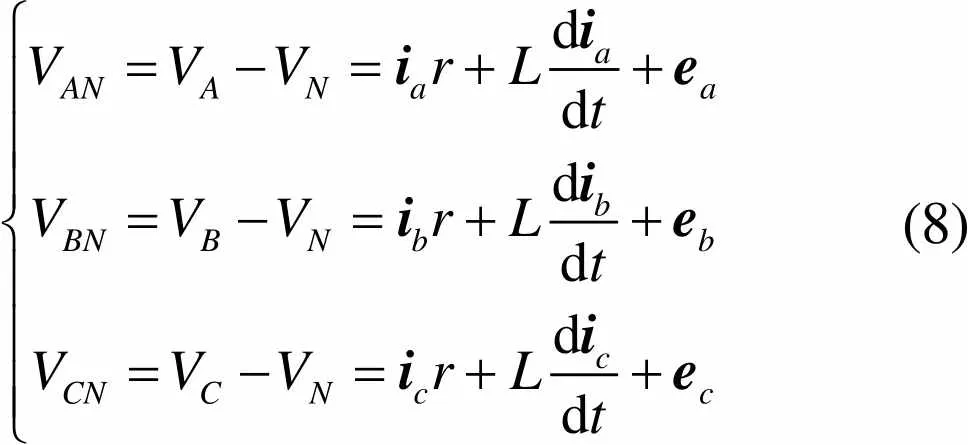
(8)
将式(8)中的3个式子相加可以得到
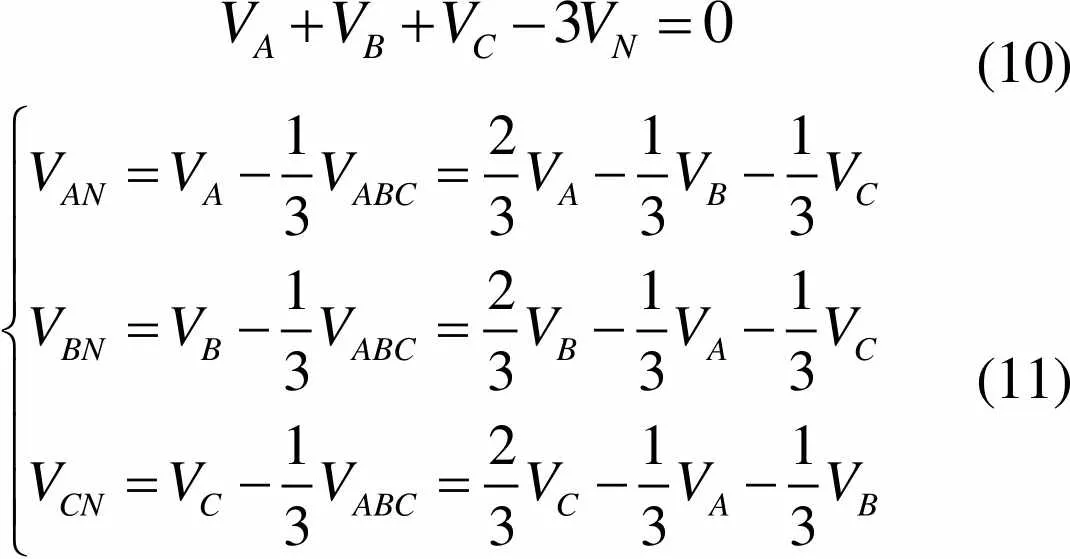
(10) (11)

(12)
将式(12)代入式(11)可得
转子位置的实时检测是实现转子磁场定向控制技术的必要条件。本文利用无传感器进行测速。PMSM在3种坐标系下各空间矢量如图3所示。反电势包含着转子的位置及转速信息,当采用直轴分量置零控制技术之后,反电势与轴重合,利用图3中各矢量的角度关系可以计算出转子的位置。
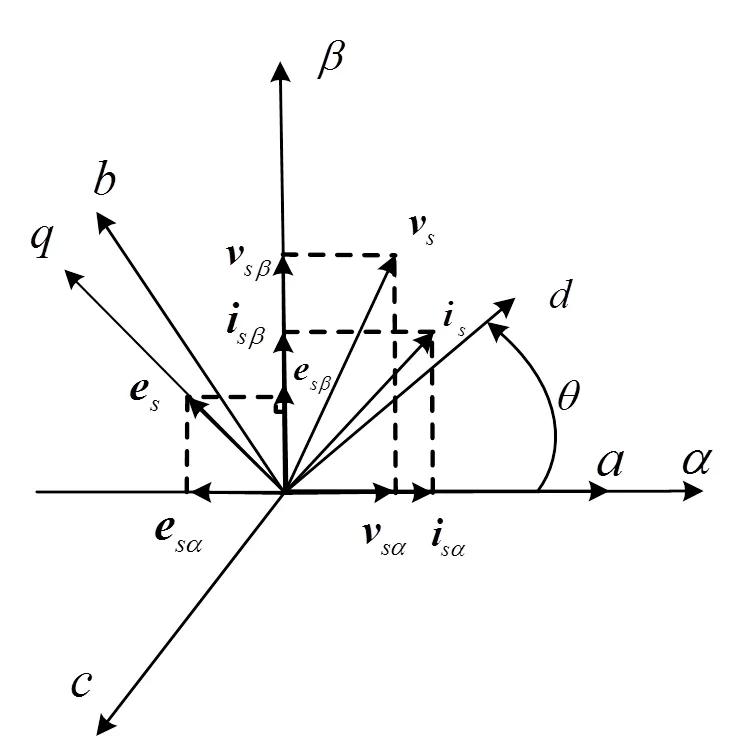
图3 PMSM三坐标系及各变量矢量图
本文利用滑模观测器对反电势进行估算,然后计算出转子的位置。由PMSM每相绕组上的电压平衡方程式(8)可得状态空间表达式
利用矩阵表达式可以表示为
其中,为电压平衡方程系数;为滑模观测器的开关函数,其意义为当电气常数远小于机械常数时,此时转速的变换较大,由于反电势与转速成正比,因此可以将反电势视为扰动量[9]。扰动量的存在使滑模函数不断在滑模面上切换,切换函数包含了反电势的信息。当时可保证滑模观测器的稳定性[10]。
式(16)减去式(14),可得到电流误差动态方程
由于在滑模变结构控制中,掺杂许多开关信号,因此需要设计滤波器对其进行滤波,本文采用一阶低通数字滤波器[11]
对式(18)进行拉氏变换可以得到
3 系统调试结果与分析
系统构建方框图如图4所示。由于本系统采用无位置传感器,当电机在低转速下,转速波动较大,影响电机的启动,本系统采用单电流环启动。同时由于永磁同步电机无法自启动,本系统采用斜坡升速控制策略,使电机在低速给定下启动。如图4所示,电机启动时,开关cse1和cse2打在上侧,轴电流给定一个参考值,转子位置给定由斜坡控制模块提供。当电机接近转速给定值时,开关打在下侧。
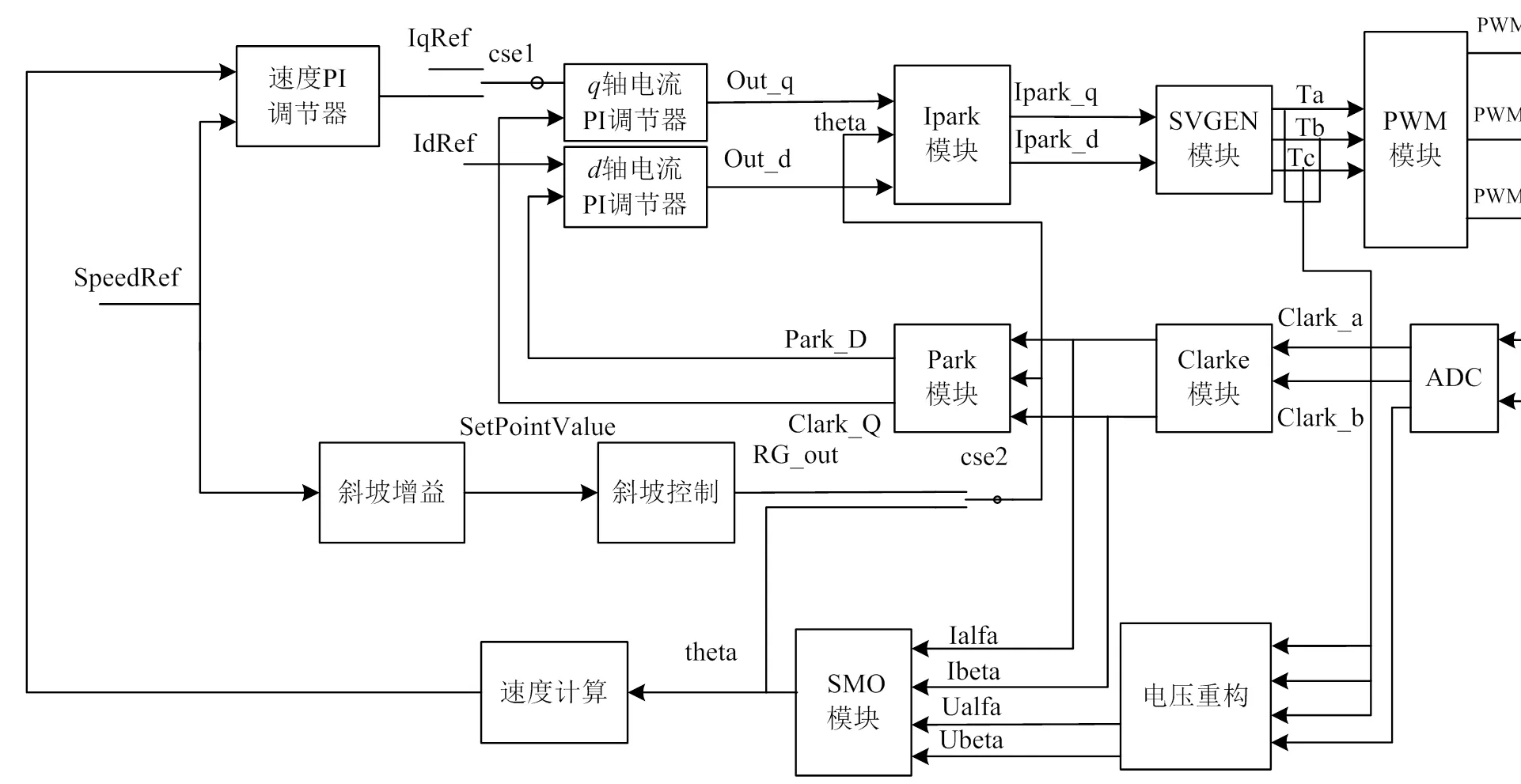
图4 电机双闭环控制系统方框图
本节主要验证Clarke和Park变换模块能否正常工作,并验证滑模观测器模块和斜坡控制模块的波形,再整定电流PI调节器和转速PI调节器的参数。
利用示波器观察Clarke变换后输出的波形,如图5(a)所示。Clarke变换将三相永磁电机的定子三相电流变换为空间正交的轴系的电流矢量。
Park变换后电流的输出波形如图5(b)所示。轴电流接近于0,实现了直轴分量置零的控制策略。
经过滑模观测器参数整定实验,当参数设置为表1时,估算得到的反电势波形如图6所示。由图6可以看出,估算得到的反电势仍然有抖动存在,不过已经非常接近正弦波,可以认为估算正确。
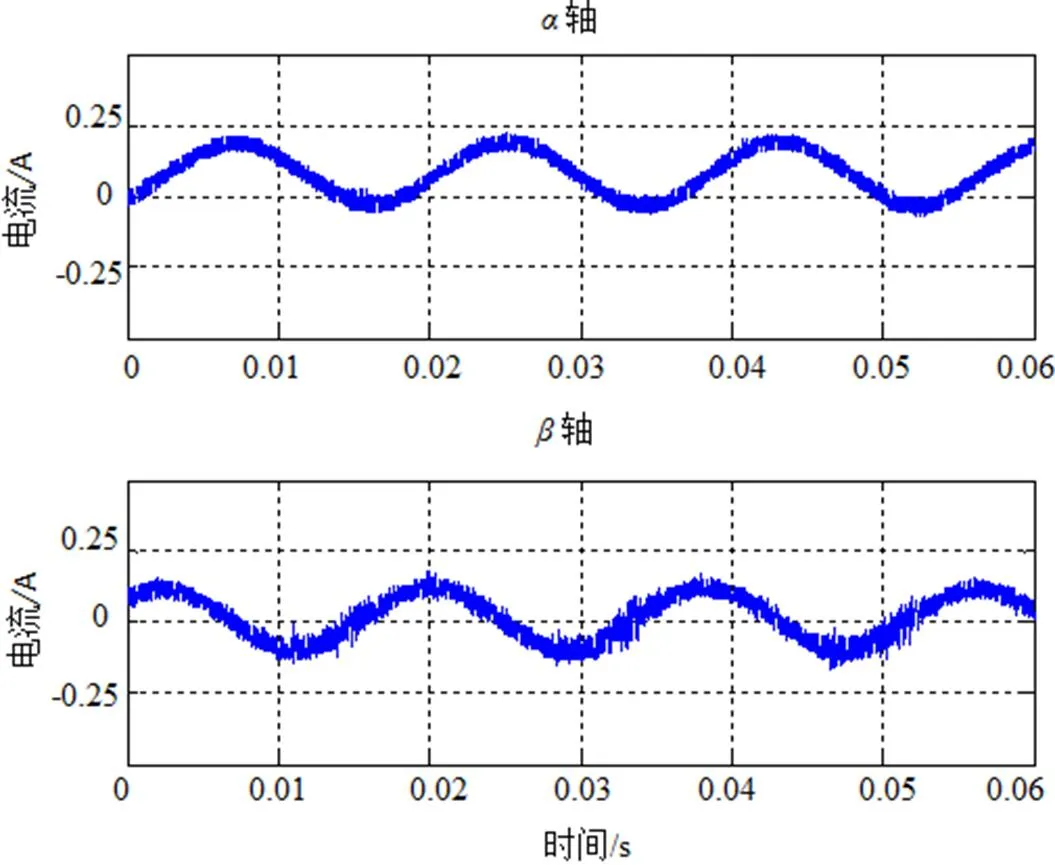
图5(a) Clarke变换后的电流波形
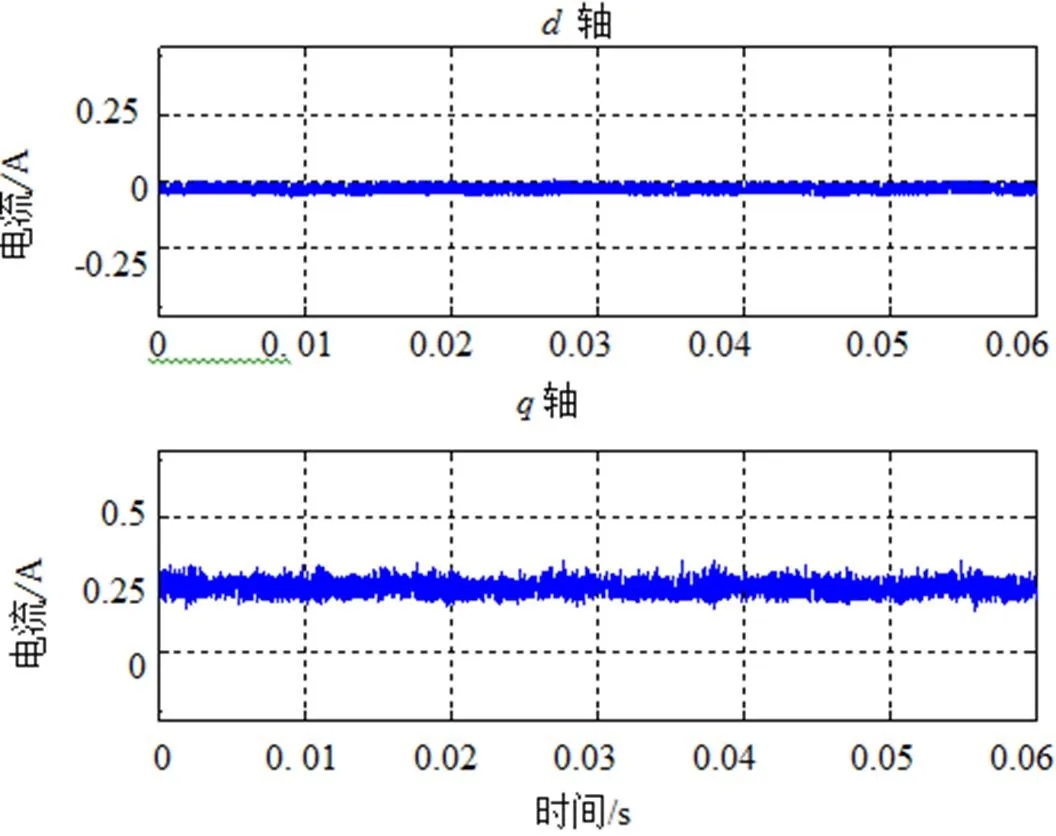
(b) Park变换后的电流波形

表1 滑模观测器参数
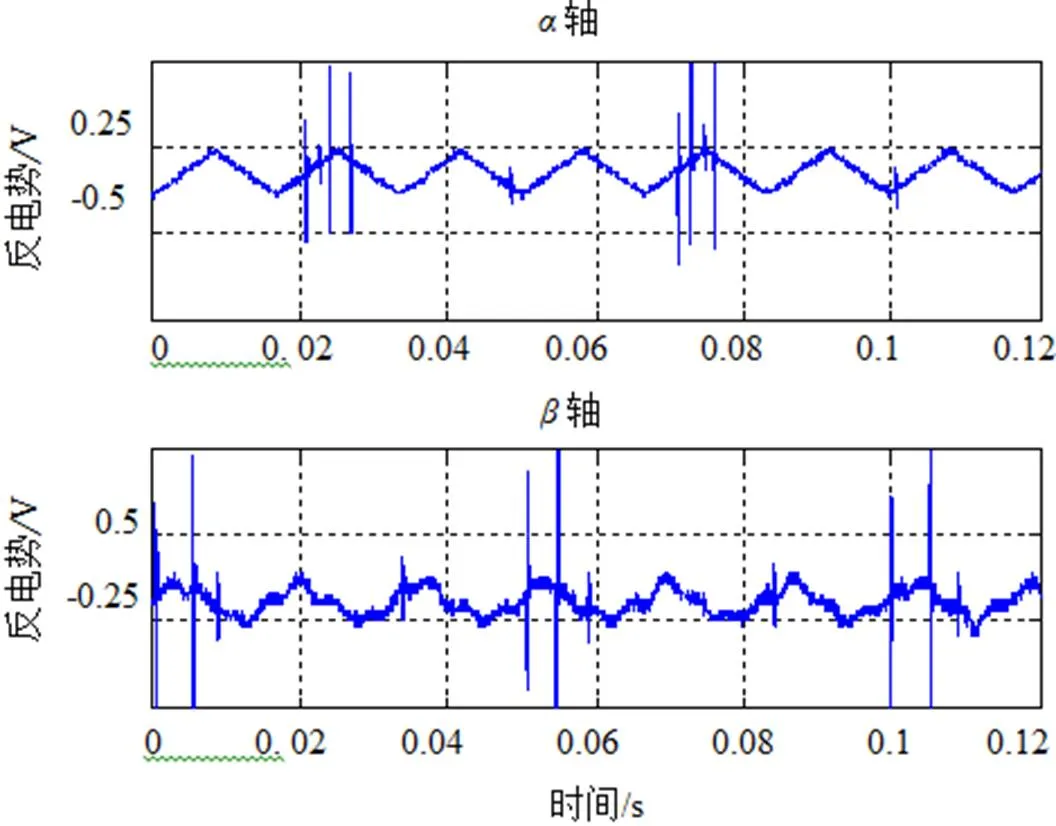
图6 相电压及反电势估算波形
利用双踪示波器观察滑模观测器模块和斜坡控制模块的转子位置输出波形,如图7(a)所示。
在滑模观测模块中利用了低通滤波器,因此估算角度与实际角度存在时间延迟,需对估算角进行补偿。文献[12]中提出一种矫正方法,利用式(21)对系统进行校正。矫正后的波形如图7(b)所示,实现了转子位置无差估计。
通过实验,当比例系数等于1时,系统响应比较好,转速响应曲线如图8所示。
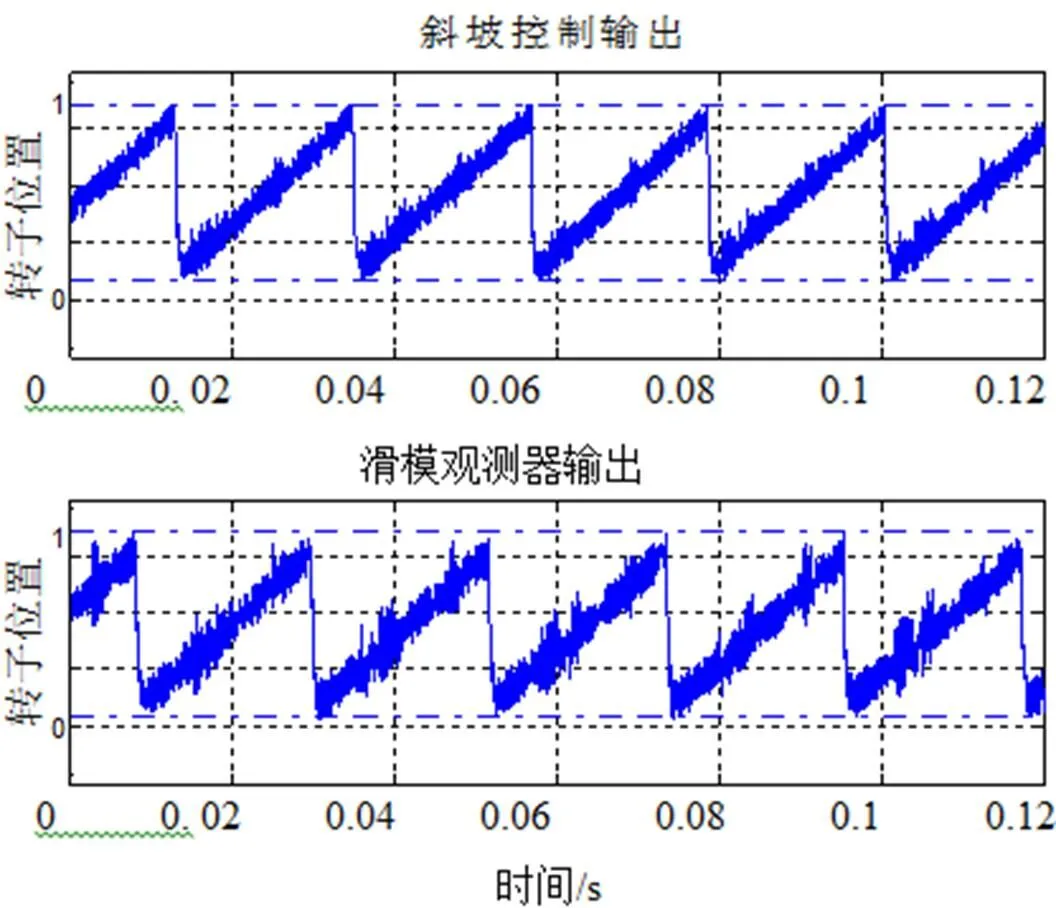
(a) 校正前波形
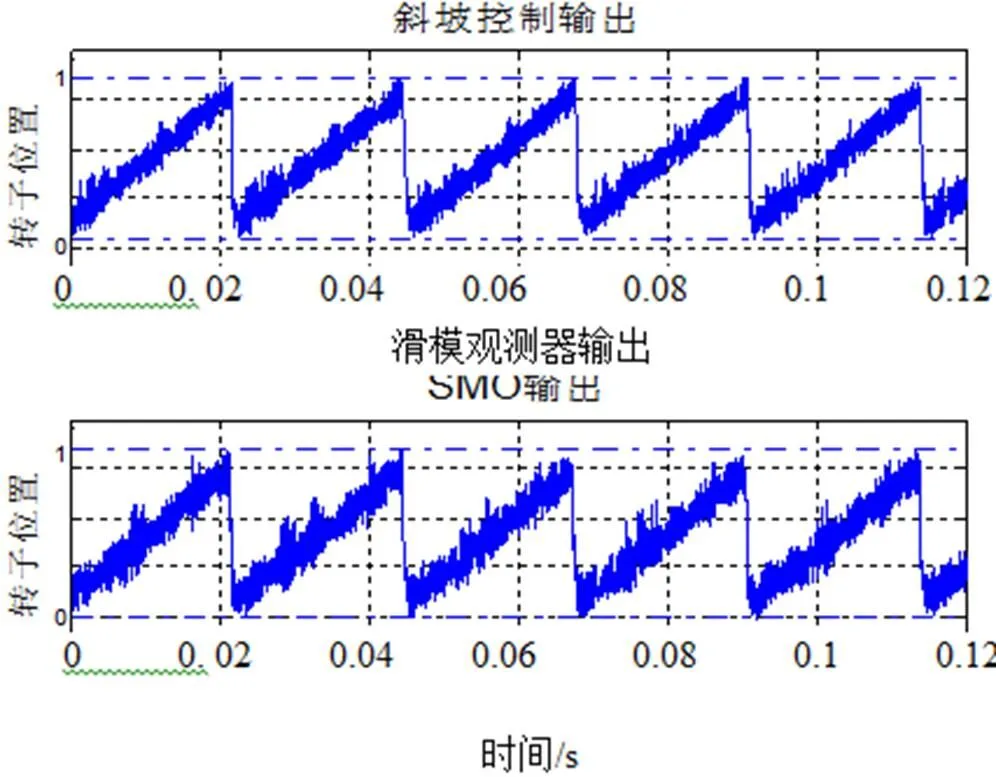
(b) 校正后波形
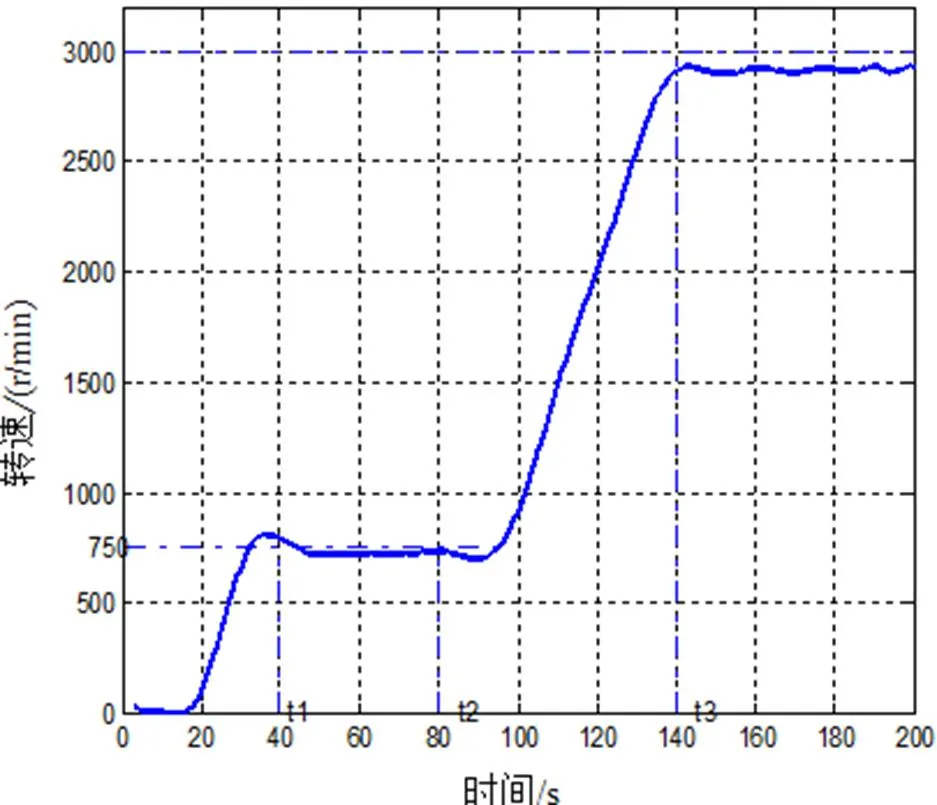
图8 转速PI调节器比例系数为1时转速响应曲线
将K设置为1,然后将K由小到大进行实验。K分别设置为0.003、0.005、0.01。经过试验,当K为0.01时电机震动,系统不稳定;K分别为0.003和0.005时的转速响应曲线如图9(a)所示。由图9可知当K设置为0.005时,系统响应比较优越,因此可将K设置为0.005。
经过对调节器参数的整定,最后对PMSM控制系统进行调速实验。如图9(b)所示,在t1至t5时刻分别将系统的给定设置为1500 r/min、3000 r/min、4200 r/min、2400 r/min和600 r/min,实现了矢量控制系统的平滑调速目的。
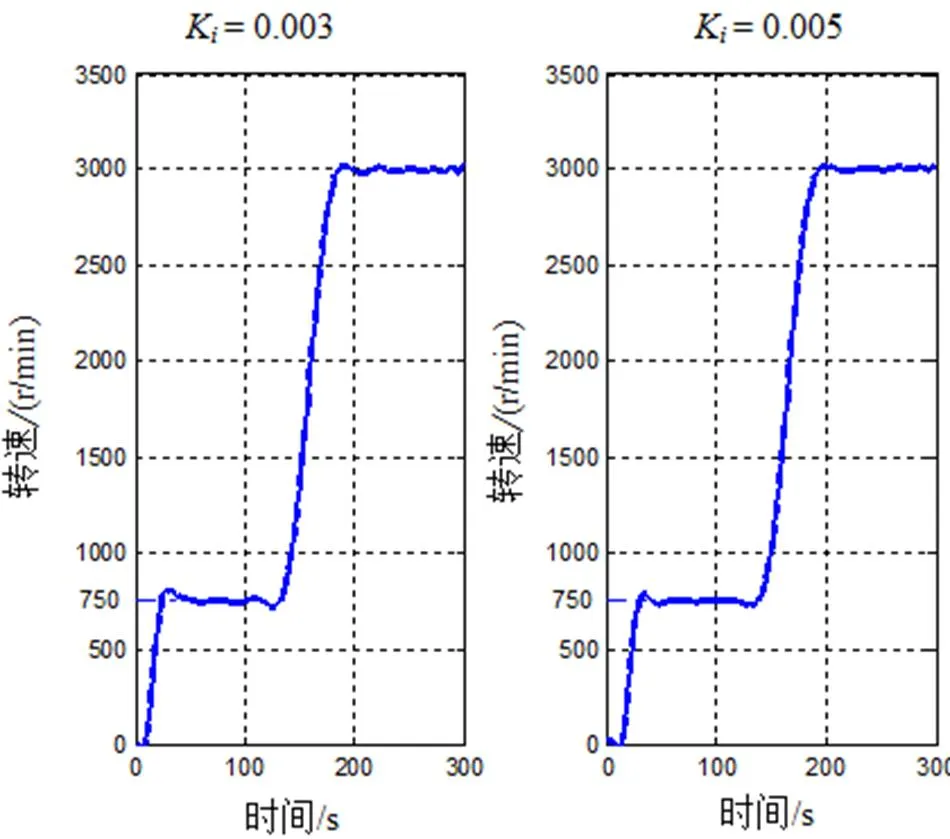
(a) PI参数整定转速响应
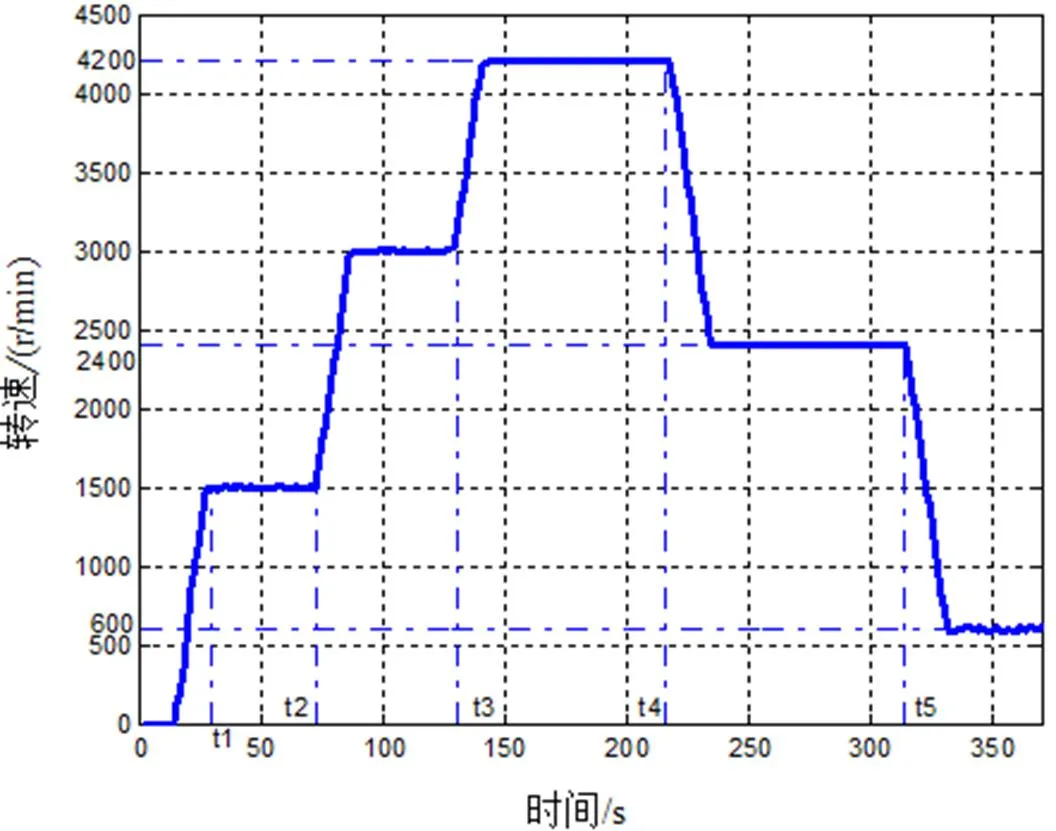
(b) 电机调速响应
4 结论
本文对永磁电机矢量控制系统进行设计与研究:
1) PMSM的物理变量比较复杂,耦合度强。相对于直流电机来说,其控制方式比较复杂。本文通过建立矢量控制系统,电机调速性能优越,且控制系统稳定;
2) 通过坐标变换,利用Clarke和Park变换可以将三相交流电机等效为直流电机进行控制;
3) 利用经验法对PI调节器参数进行整定,建立电流、转速双闭环,使PMSM达到直流电机一样的调速优点;
4) 利用滑模观测器对转子位置进行估计,省去了编码器,降低成本,并且测量位置误差较小。
[1] 胡伯平.稀土永磁材料的现状与发展趋势[J].磁性材料及器件,2014,45(2):66-7,80.
[2] 王成元,夏加宽,孙宜标.电机现代控制技术[M].北京:机械工业出版社,2007.
[3] 阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:械工业出版社,2010:15-156.
[4] 魏祥林,傅龙飞,郝晓弘.交流电机理论中相量、矢量的概念辨析及空间矢量分析法的意义[J].上海大中型电机,2012 (2):40-45.
[5] 孙冠群,于少娟.控制电机与特种电机及其控制系统[M].北京:北京大学出版社,2011:26-255.
[6] 苏健勇,李铁才,杨贵杰.PMSM无位置传感器控制中数字滑模观测器抖振现象分析与抑制[J].电工技术学报,2009, 24(8):58-64.
[7] 傅涛.基于滑模观测器的永磁同步电机无位置传感器控制[D].天津:天津大学,2004.
[8] 张辑,张训斌,陈天翔,等.同步电动机相电压重构及磁链观测研究[J].电气传动,2013,43(8):29-32,64.
[9] 孙杰,崔巍,范洪伟,等.基于滑模观测器的永磁同步电机无传感器矢量控制[J].电机控制与应用,2011,38(1):38-42.
[10] 牛力伟.永磁同步电机无传感器转子位置估算研究[D].哈尔滨:哈尔滨理工大学,2013.
[11] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007, 27(3):23-27.
[12] 吴春华,陈国呈,孙承波.基于滑模观测器的无传感器永磁同步电机矢量控制系统[J].电工电能新技术,2006,25 (2):1-3,5.
Design of Sensorless Vector Control System for Permanent Magnet Synchronous Motor
Zhang Yunliang1Zhang Zhaoxu2Cao Yongjun3,4Zhao Mei2
(1. Weihai Guangtai Airport Equipment, Inc. 2. School of Information and Electrical Engineering, Ludong University 3. Guangdong Automation Research Institute, Guangdong Modern Control Technology Key Laboratory 4. South China Robotics Innovation Research Institute)
Permanent magnet synchronous motor (PMSM) is a multivariable system, which is nonlinear and strong coupling. This paper designed a field-oriented control system (FOC). Firstly, the stator current vector is separated into the rotor flux vector and the torque current vector by coordinate transformation, which is controlled by PI control algorithm of current loop, and the technology of space vector pulse modulation (SVPWM) is used to realize motor variable frequency speed regulating. Secondly, at the stage of designing PI control algorithm of speed loop, the speed of rotor is calculated by the position of rotor which is estimated by sliding mode observer (SMO). Finally, By experimental Analysis, the system has a high adjusting precision and runs stably. Thus, it succeeds to carry out the vector control algorithm.
PMSM; FOC; SMO; Rotor Field Oriented Control; SVPWM
张云亮,男,1980年生,硕士,工程师,主要研究方向:电力电子及其控制。E-mail: hit-zyl@sohu.com
张兆旭,男,1993年生,研究生,主要研究方向:永磁电机一体化设计及控制。
曹永军,男,1981年生,硕士,高级工程师,主要研究方向:智能控制与系统。
赵玫,女,1983年生,博士,副教授,主要研究方向:永磁电机一体化设计及控制。
国家自然科学基金资助项目(51407088);中国博士后科学基金(2016M592242);广东省科技计划项目(2015B010917001)、(2016B090912005)、(2015B090922008);广州市科技计划项目(201607010313)。