基于单片机的倒车雷达系统的设计与实现
2016-10-12严敏
严 敏
(江苏联合职业技术学院扬州商务分院 信息电子系,江苏 扬州 225127)
基于单片机的倒车雷达系统的设计与实现
严 敏
(江苏联合职业技术学院扬州商务分院 信息电子系,江苏 扬州225127)
设计一种以单片机STC89C52为控制核心的倒车雷达系统,以避免汽车在倒车或停车时发生的碰撞问题.系统通过按键设置报警距离,通过LED数码管显示汽车与障碍物之间的距离,当其小于报警距离时,通过报警电路进行安全提示.首先使用Proteus和Keil进行仿真联合调试,然后进行实验验证,实验结果表明倒车雷达系统在20~400 cm内可实现准确测距,具有外围电路简单、可靠性高、实用性强等优点.
单片机;超声波;HC-SR04;倒车雷达
随着人们生活质量的逐步提升,汽车已成为很多家庭必不可少的出行交通工具.在人们享受汽车带来便利生活的同时,因倒车而引发的碰撞问题日益突显.近年来,倒车雷达系统成为的热点研究课题.倒车雷达是汽车倒车或者停车时的安全辅助装置,采用超声波测距技术,以声音或图像提醒驾驶员汽车后方障碍物的情况,扫除视线死角,提高行车安全性[1-5].本文设计一种以单片机STC89C52为控制核心的倒车雷达系统,以避免汽车在倒车或停车时发生的碰撞问题.系统通过按键设置报警距离,通过LED数码管显示汽车与障碍物之间的距离,当其小于报警距离时,通过报警电路进行安全提示,首先使用Proteus和Keil进行仿真联合调试,然后进行实验验证.
1 超声波测距原理
本系统采用超声波渡越时间法测距[6-7],利用单片机驱动超声波发射器发射超声波的同时启动定时器开始计时,当超声波接收器检测到回波即停止计时.定时器记录的超声波从发射到返回的时间差t乘以声速C就可以得到声波传输距离,而所测距离S为声波传输距离的一半,即S=Ct/2.其中,声速C与温度有关,如果空气温度变化不大,则可认为声速是基本不变的,通常情况下,超声波声速为340 m/s.其测距原理框图如图1所示.
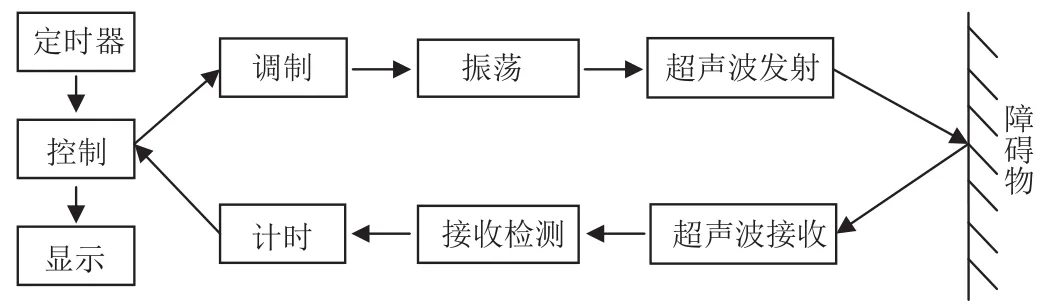
图1 超声波测距原理框图
2 系统硬件设计
2.1设计总体结构
以单片机STC89C52为控制核心,设计一种倒车雷达系统,其硬件部分主要由单片机主控器模块、超声波测距模块、按键设置模块、LED数码显示模块、蜂鸣器报警模块组成,系统结构框图如图2所示.其中,超声波测距模块采用HC-SR04,模块包括超声波发射器、超声波接收器和控制电路,测距范围为20~400 cm,测距精度可高达3 mm.三个按键用来设定和更改报警距离,分别为设置键、加键、减键,只有按下设置键才可以进行加、减操作.LED数码管用来显示汽车与障碍物之间的距离,当其小于报警距离时蜂鸣器进行报警提示.
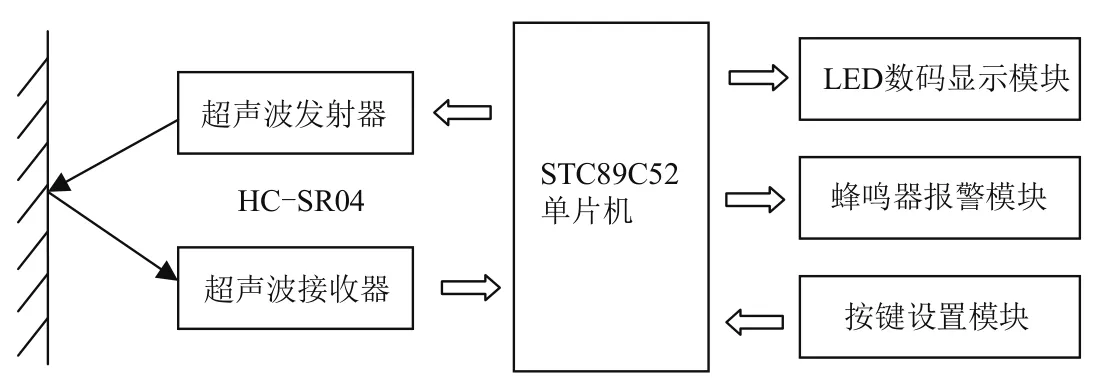
图2 系统结构框图
2.2HC-SR04超声波测距模块
2.2.1HC-SR04接口
如图3所示,HC-SR04有四根线,VCC提供5 V电源,GND为地线,TRIG为触发控制信号输入端,ECHO为回响接收信号输出端.
2.2.2HC-SR04超声波时序图
HC-SR04超声波时序图如图4所示,单片机的I/O口接TRIG端口提供至少10 µs 的脉冲触发信号,模块内部自动发出8个40 kHz的方波并自动检测回波,一旦检测到有回波则通过ECHO端口输出回响信号,高电平持续的时间就是超声波从发射到返回的时间[8],由此可以计算得到所测距离=(高电平时间×声速)/2.
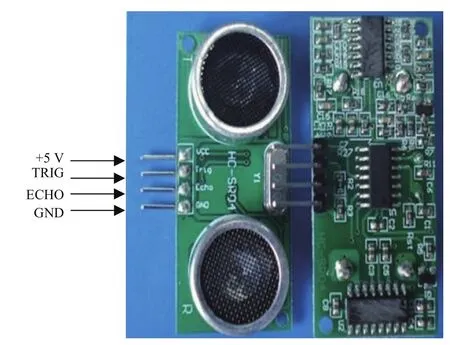
图3 HC-SR04正反面实物图
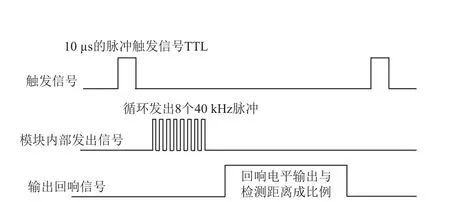
图4 超声波时序图
3 系统软件设计
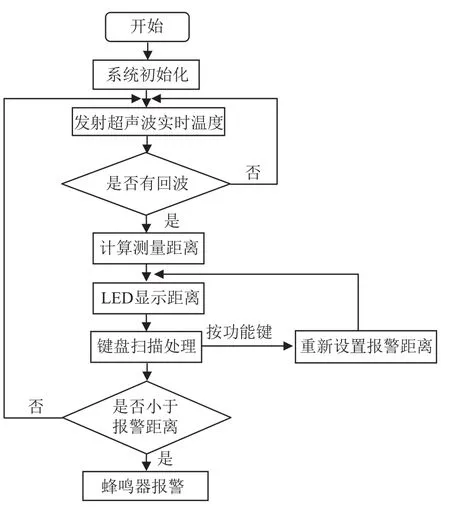
图5 系统程序流程图
软件程序主要完成报警距离的设置及汽车与障碍物之间距离的测量、计算及显示等功能,采用模块化设计思路,包括初始化子程序、LED数码管显示子程序设计、按键扫描子程序设计、距离计算子程序设计、定时器子程序等,系统程序流程如图5所示.
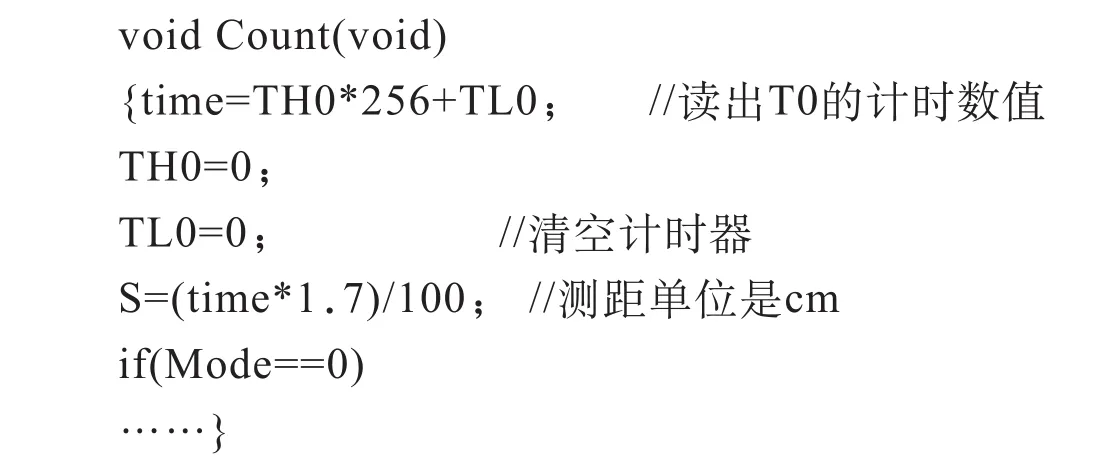
3.1距离计算子程序设计
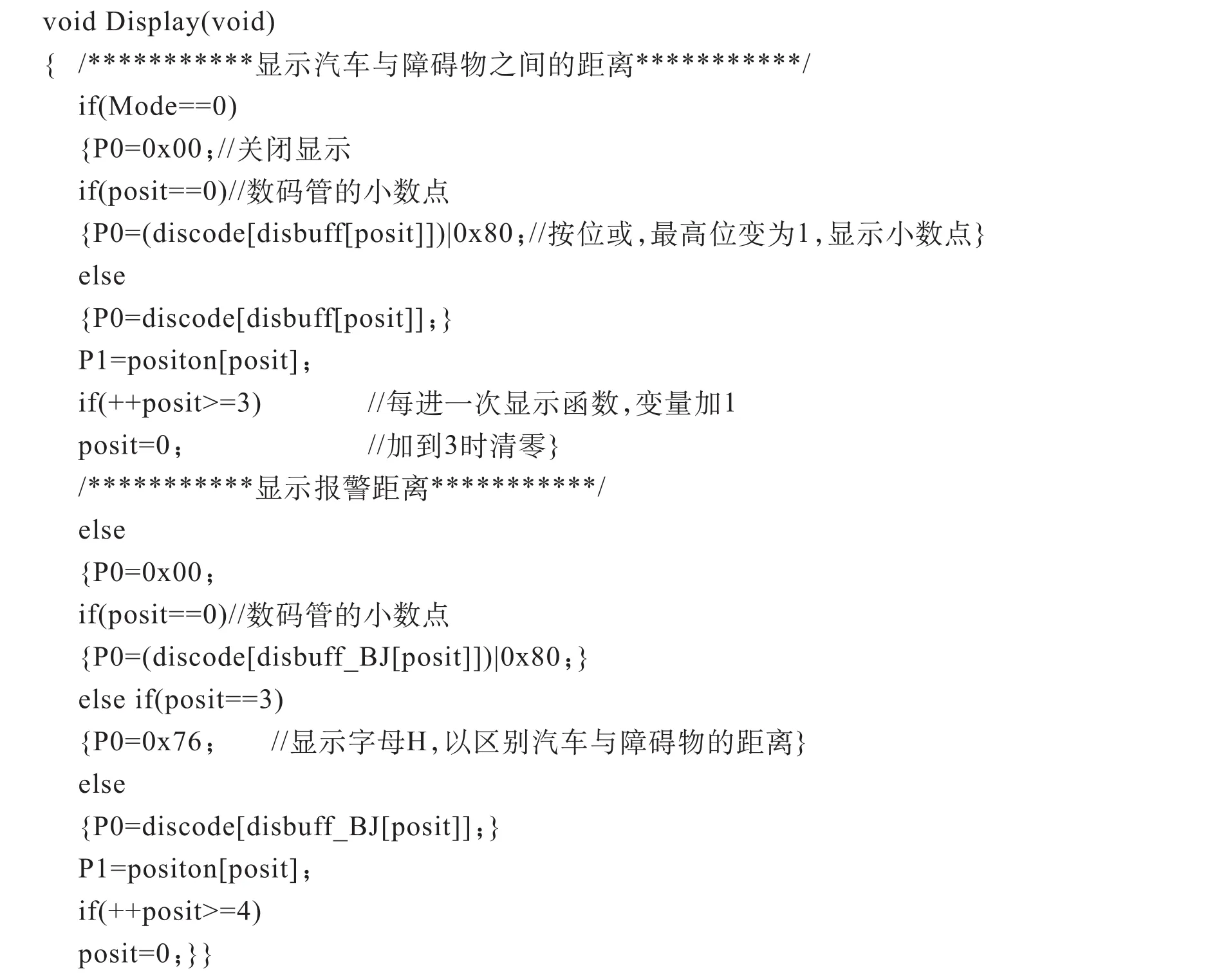
3.2LED数码管显示子程序设计
在编程时,LED数码管要显示哪个数字或字符,只需写入相应的字段码,利用循环扫描的方式,分时轮流选通各个LED数码管,当扫描速度达到一定程度时,由于人眼的视觉暂留效应,感觉所有LED数码管同时点亮.其部分代码设计为
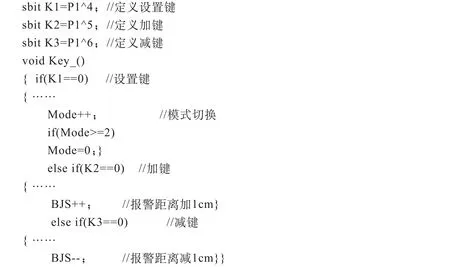
3.3按键扫描子程序设计
当有键按下时,首先确定键值,再进行相关处理,其部分代码设计为
4 Proteus仿真
使用Proteus和Keil联合调试,可以得到倒车雷达系统仿真结果,如图6所示,LED数码管实时动态显示汽车与障碍物之间的距离,当前为153 cm.如果汽车离障碍物较远,超出测量范围,LED显示管如图7所示.由于Proteus单片机仿真软件中没有超声波模块,本系统使用单片机软件程序来模拟,超声波模块的两个按键实际设计中并没有,只是在仿真时用来调节汽车与障碍物的远近.
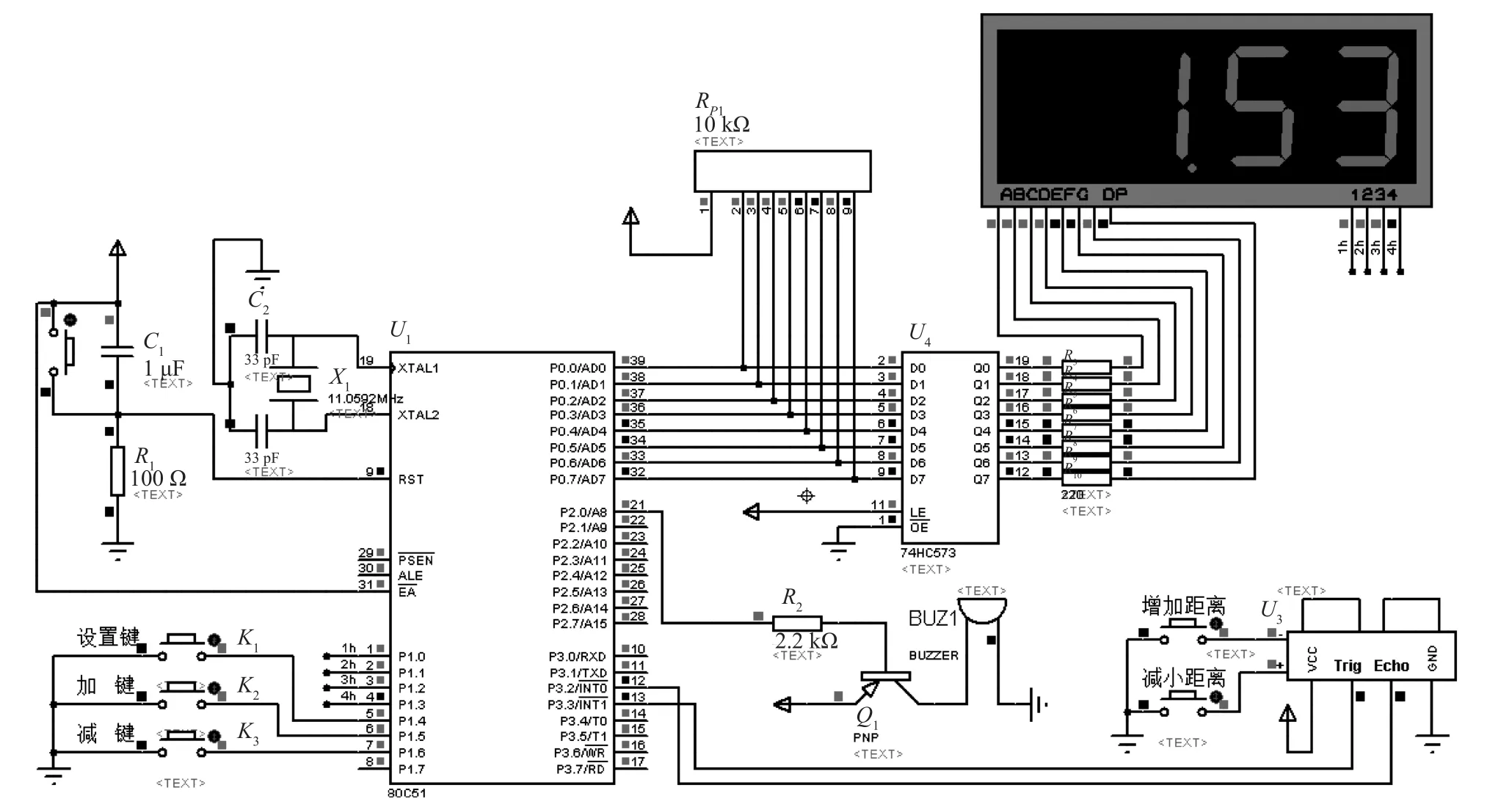
图6 倒车雷达系统仿真结果
此时,如果按下设置键K1,可以重新设置报警距离,为了区分报警距离和汽车与障碍物之间的距离,LED数码管在显示汽车与障碍物之间的距离时,其第一个数码管不显示,而在显示报警距离时,其第一个数码管显示字母H,如图8所示,当前报警距离为85 cm;如果继续按下加键K2,LED数码管显示如图9所示;如果按下减键K3,LED数码管显示如图10所示,报警距离设置完毕,再次按下K1键,LED数码管显示汽车与障碍物之间的距离,如果其小于报警距离,则蜂鸣器报警,可见仿真满足设计要求.
图7 超出测量范围

图8 按下设置键K1

图9 按下加键K2

图10 按下减键K3
5 实验结果
仿真成功后再制作实物倒车雷达系统,各个元器件焊接调试完毕,加载程序,系统实验结果如图11所示,LED数码管实时动态显示当前物体与障碍物之间的距离,如果其小于报警距离,则蜂鸣器响,通过按键可以重新设置报警距离,反复测试,系统满足设计要求.

图11 系统实验结果
6 结论
从仿真和实验结果可以看出,以单片机STC89C52为主控器,采用超声波测距模块HC-SR04的倒车雷达系统能有效避免汽车在倒车或停车时发生的碰撞问题,提高行车安全性.实验结果表明倒车雷达系统在20~400 cm内可实现准确测距,测距精度可高达3 mm,具有外围电路简单、可靠性高、实用性强等优点.
[1] 韦穗林. 基于单片机的倒车防撞预警系统设计和实现[J]. 现代电子技术,2009(21):160-163.
[2] 林志盛,熊柳,邓曦平,等. 倒车雷达预警系统的设计和实现[J]. 实验科学与技术,2013(3):176-179.
[3] 芮长颖. 基于AT89C52单片机的汽车倒车雷达系统设计[J]. 信息化研究,2012(3):42-44.
[4] 王桔,云连鹏. 车载安全防范终端的设计与开发[J]. 长春大学学报(自然科学版),2011,21(12):18-20.
[5] 李荃高. 基于单片机的时区时钟设计[J]. 苏州市职业大学学报,2015,26(2):29-31.
[6] 高旭,朱军. 基于AT89S52单片机的超声波倒车雷达系统的设计[J]. 电子技术,2010(1):60-61.
[7] 杨成慧,滕帅,罗楠. 一种汽车倒车防撞系统设计[J]. 西北民族大学学报(自然科学版),2014,35(4):7-13.
[8] 苏巧平,刘原,纪利琴. 基于1760语音模块的汽车倒车防撞语音提示系统设计[J]. 宝鸡文理学院学报(自然科学版),2013,35(2):50-52.
(责任编辑:沈凤英)
Design and Implementation of a Reversing Radar System Based on Single Chip Microcomputer
YAN Min
(Department of Electronic Information,Yangzhou Business Branch of Jiangsu Union Technical Institute,Yangzhou 225127,China)
A reversing radar system is designed based on MCU STC89C52 to avoid collision in car backing or parking. It is equipped with three buttons to set the alarm distance and a LED digital displayer to tell the distance between the car and the obstacles. When the car is within the alarm distance, the alarm circuit will give out warning signals. Proteus and Keil are first introduced to simulation test and then real test. The testing results show that the reversing radar system is precise in measuring distance within 20 to 400 cm and it enjoys such advantages as simple peripheral circuit, higher reliability and practicability, and the like.
single chip microcomputer;ultrasonic;HC-SR04;reversing radar
TP277
A
1008-5475(2016)03-0025-05
10.16219/j.cnki.szxbzk.2016.03.004
2016-05-06;
2016-06-04
江苏省职业技术教育学会职业教育课题(XHXS2015035)
严 敏(1982-),女,江苏扬州人,讲师,硕士,主要从事单片机系统开发与设计研究.
严敏.基于单片机的倒车雷达系统的设计与实现 [J].苏州市职业大学学报,2016,27(3):25-29.
