基于惯性测量器件的无线步态分析平台
2016-10-12姜鸣,仇森,赵洋,张志
姜 鸣, 仇 森, 赵 洋, 张 志
( 1.东莞理工学院 电子工程学院, 广东 东莞 523808;2.大连理工大学 控制科学与工程学院, 辽宁 大连 116024 )
基于惯性测量器件的无线步态分析平台
姜 鸣*1,仇 森2,赵 洋1,张 志1
( 1.东莞理工学院 电子工程学院, 广东 东莞523808;2.大连理工大学 控制科学与工程学院, 辽宁 大连116024 )
步态定量测量方法应用于许多领域,如临床医学、双足机器人控制等.采用惯性测量单元结合无线传感器网络建立了一个步态分析平台,将两个无线惯性测量单元传感器节点分别绑定在左右双侧脚踝,以同时采集双脚运动过程中的加速度和角速度信号,并将其通过无线方式发送到远程终端.通过模式识别、时间序列分析、阈值检测和零速修正等多种数据融合方法计算步态参数,并通过融合双足传感器数据得到双支撑相、双脚步行周期等重要的双足步态参数,其中双支撑相参数对人体日常动作的识别有重要意义.实验结果显示该研究具有较高的计算精度.
步态分析;传感器网络;数据融合;步行周期划分;双脚运动参数
0 引 言
步态分析主要研究人步行的机制,通过计算得到步态参数.步态分析对临床医学、双足机器人步态规划等都有重要的意义.目前步态分析可采用多种方法.传统临床测量借助秒表和米尺,使用目测以及足印法得到步态信息,这种方法难以准确定量划分步行周期,人为因素造成的误差大.文献[1-3]使用视频处理方法分析步态,通过记录人走路过程中的视频图像计算步态参数.这类步态识别方法需要多台摄像机从不同角度同时记录数据,图像分析算法复杂,采集的视频数据量庞大,同时环境光线容易影响分析结果.文献[4-6]使用鞋底放置的压力垫,通过采集步行过程中的压力变化来计算步态周期.由于压力信号仅能反映脚与地面接触时间段的压力变化规律,这类方法不能很好地跟踪连续运动,计算的步态参数不全面.文献[7]建立了一种大型模拟行走系统,用来分析人步态的一般规律,这种大型步态分析平台非常复杂且昂贵,使用者需要经过专业培训.
随着惯性系统向高精度、高集成度和低成本发展,更多研究开始使用惯性系统进行步态分析,通过加速度信号和角速度信号来分析步态规律以及计算步态参数.文献[8]将一个惯性传感器绑定在人的右脚上,采集步行过程中右脚的角速度和加速度信号,并计算步态参数.文献[9]结合压力传感器和陀螺仪对步态周期进行划分.目前采用惯性系统来测量步态运动存在一些不足.首先,惯性器件的固定方式与分析结果紧密相关,绑定位置设计不合适会极大降低计算结果准确性.另外,在人步行过程中,被测物体(小腿、脚背、脚踝等)的惯性坐标系与世界坐标系的相对位置不停发生变化[8],给加速度和角速度的数据融合方法带来挑战.再有,目前多数基于惯性系统的步态分析方法都采用一个惯性器件绑定在一只脚上[8-12],由于步行过程是两只脚配合的协调运动,单脚运动规律不能完全反映人体步态信息.文献[13]使用两个加速度计分析左右两个脚的步态,但是由于没有使用陀螺仪,该方法缺乏有效数据融合过程,步态信息不完整.总之,目前多数步态分析的研究都是采用单一惯性节点分析单脚运动,缺乏分析双脚协调运动规律.为了解决这个问题,本文采用两组惯性测量器件,分别绑定在左右两侧脚踝,采集步行过程中的加速度信号和角速度信号,通过多传感器数据融合算法计算出双足步态数据.
1 测量装置
本文使用两个惯性测量单元(inertial measurement unit,IMU),分别采集左右脚的惯性力.采用MSP430F149对IMU进行数据采集,CPU时钟频率为1 MHz,使用无线射频芯片CC2420将采集到的数据通过2.4 GHz无线信道与接收节点通信,将步行过程中双脚的加速度和角速度数据传回PC端,在PC端计算步态参数.IMU传感器节点选取一个三轴加速度计(LIS344ALH)和一个单轴陀螺仪(LY530AL),器件性能指标如表1所示.

表1 惯性器件的性能指标
加速度计和陀螺仪通过12位AD转换得到数字量,采样前使用低通滤波器滤去电源带来的50 Hz频率的干扰.惯性器件校正时,将加速度计的每个轴与地面垂直,通过校正使其输出+1g或-1g加速度量.使用陀螺仪专用校正控制转台,将陀螺仪分别转过90°、180°、270°和360°,记录陀螺仪输出曲线,通过校正使其积分结果得到正确角度.
实验中使用特制绷带将两个IMU传感器节点绑定在志愿者左右两个脚踝上,固定方式如图1所示.在处理绑定误差的问题上使用了文献[14]和[15]中所提到的传感器初始对准方法.
在器件固定过程中,从PC端实时监视器件输出,使加速度计X轴与重力方向相反,输出加速度量为-1g,并保证惯性坐标系与矢状平面平行.根据本文设计的惯性器件结构,这时陀螺仪测量轴与矢状平面垂直.

图1 IMU传感器节点的绑定方式
2 数据分析
本文使用图2所示的流程计算单脚和双脚的步态参数.传感器节点绑定在使用者的脚踝关节处,用于测试使用者行走过程中脚部的三维加速度和三维角速度.同时上位机控制使用者行走过程中传感器数据采集的开始和结束,采集完成后,通过数据滤波和校准,使用基于多传感器数据融合的步态分析算法,其中包括融合加速度和角速度数据、融合双足的传感器步态数据;然后分别计算出单足步态参数和双足步态参数,其中包括时间参数和空间参数.
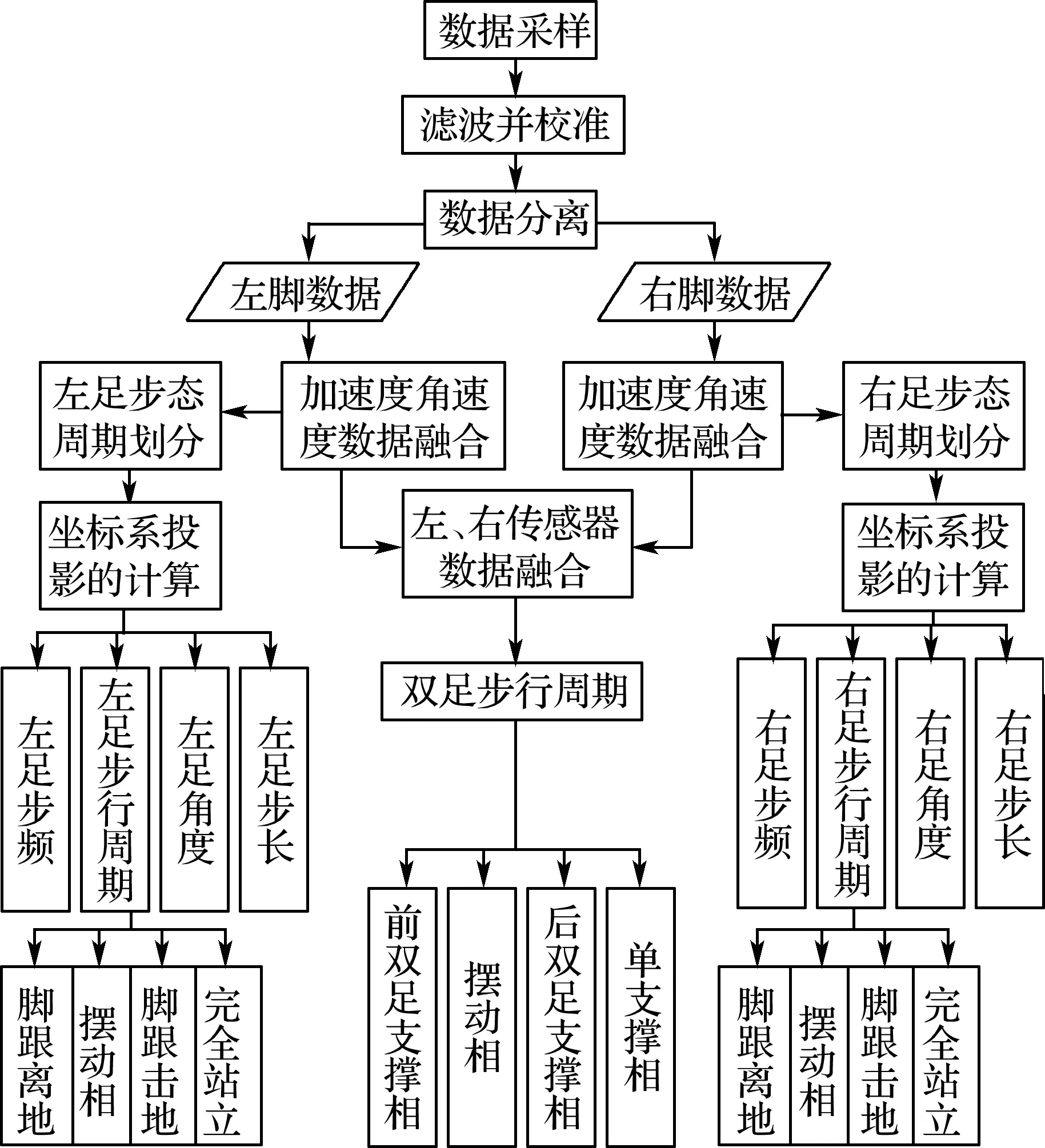
图2 步态数据处理流程
2.1加速度与角速度数据融合

(1)
2.1.2坐标系转换步行过程中,惯性器件与地面参考位置一直发生着变化,如图3所示.由于步态信息包含在世界坐标系内(图3中的矢状平面),需要将惯性系下的数值投影到世界坐标系下,从而计算出步长等步态参数[8].此处需要说明的是,由于主要的空间步态参数,比如步长、步速和足角都体现在矢状平面,本文的研究重点就是在人体矢状平面内的运动信息.
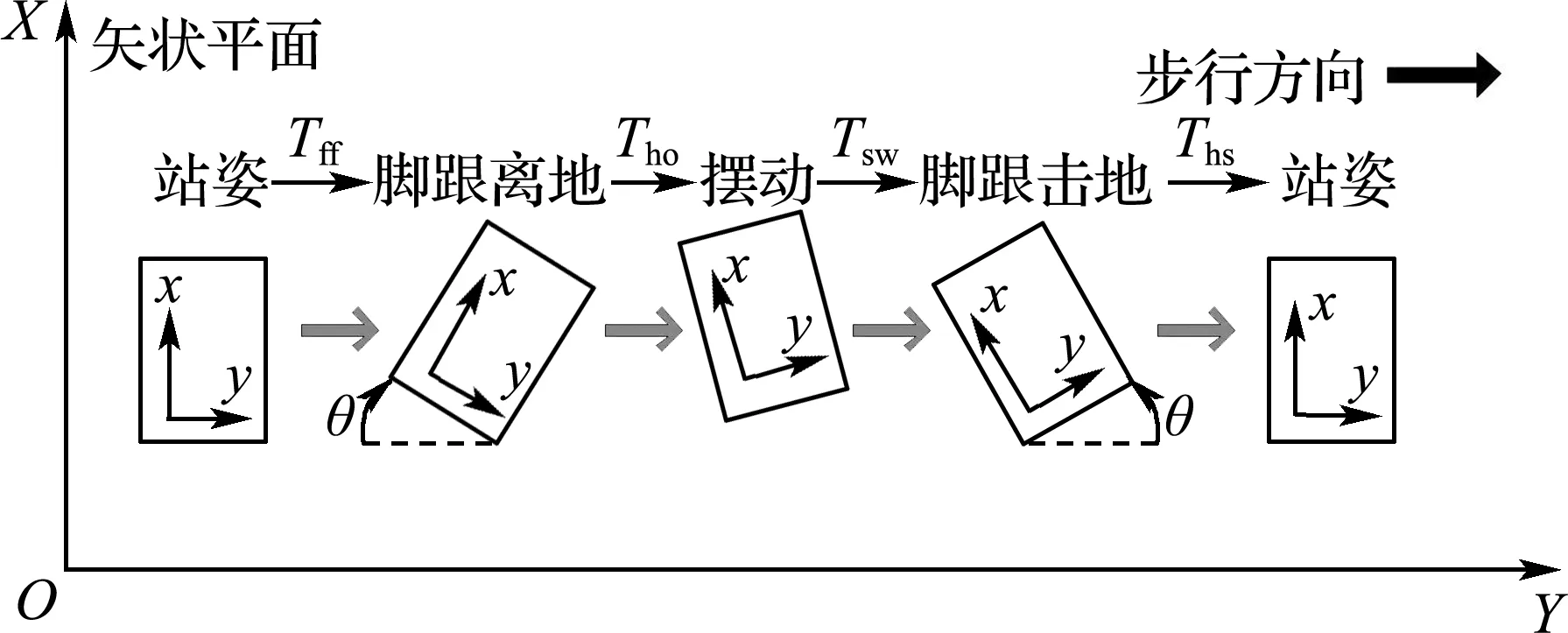
图3 走动过程中的两个坐标系关系
图3中角度θ表示两个坐标系的偏差角度,由于陀螺仪测量轴与矢状平面垂直,θ可由角速度计算得到,计算过程详见2.1.4节.根据θ(t)通过式(2)所示的线性转换将加速度计输出的x轴和y轴加速度信号ax(t)和ay(t)投影到世界坐标系的Y轴内,得到步行方向上的加速度信号aY(t):
aY(t)=ay(t)cosθ(t)+ax(t)sinθ(t)
(2)
2.1.3单足步行时相划分一个步态周期分为摆动相周期Tsw和站立相周期Tsp,摆动相是脚与地面不接触的时间,站立相是脚与地面接触的时间.站立相又分为3个阶段,分别是脚跟离地Tho、脚跟击地Ths,以及完全站立相Tff.在2.1.1节得到步行周期划分的基础上,根据Y轴加速度信号进一步对单足步行时相做划分.本文采用滑动方差方法分别使用式(3)和(4)计算y轴加速度在滑动窗口内的均值和方差:
(3)
(4)
其中i是采样序列号;M是窗口大小,本文中M=30.图4所示是实际采样过程中的一个步行周期.

图4 一个步行周期内步行时相的划分
每一步开始时,在滑动方差大于0.01的情况下,认为是脚跟离地时刻(tho);当角速度第一次变正时,认为是摆动相开始的时间点(tsw);由于脚跟着地时y轴加速度会产生明显脉冲,在发生脉冲时认为是脚跟击地的时刻(ths);当滑动方差小于0.01时,认为是完全站立开始时刻(tff).一个步行周期内的步行时相由式(5)~(8)来计算:
Tho(i)=tsw(i)-tho(i)
(5)
Tsw(i)=ths(i)-tsw(i)
(6)
Ths(i)=tff(i)-ths(i)
(7)
(8)
2.1.4角度的计算步行过程中单足转过的角度θ(t)可以根据下式计算:

θ(t)=∫ttho(i)θ.(τ)dτ+θinit(i)
(9)
初始角度θinit通过式(10)计算,本文中令N=10,方括号代表离散点的序列号.
(10)
根据式(9),一个步行周期内的足俯角θpitch可由下式计算:
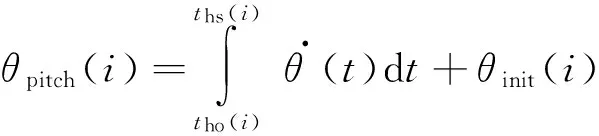
θpitch(i)=∫ths(i)tho(i)θ.(t)dt+θinit(i)
(11)
本文中规定顺时针为负方向,逆时针为正方向,因此在脚跟离地期发生的负角度由式(12)计算,在摆动期发生的正角度由式(13)计算:
θpitch(-)=∫tsw(i)tho(i)θ.Z(t)dt+θinit(i)
(12)
(13)
2.1.5步伐长度计算在一个步行周期内,通过对步行方向上(世界坐标系内)的加速度信号aY(t) 进行积分可以得到步伐长度,如式(14)所示,[ ]表示积分是数值积分,使用梯形法积分:
(14)
2.2双脚传感器数据融合
人直立行走是身体协调运动的过程,需要左右脚协调配合.已有研究大多使用单个节点采集单脚步行数据,仅能分析单脚步态信息.本文设计两个节点同步采集左右脚的步行数据,可以分析双脚步行过程的相关性,反映两脚协调运动的规律.两个脚协调运动时,步态周期分为单支撑相(single stand phase,SSP)、双支撑相(dual stand phase,DSP),以及摆动相(swing phase,SW).双支撑相是指两个脚同时与地面接触,单支撑相是指只有一只脚与地面接触.从左脚脚跟离地到开始摆动相的期间是左脚前双支撑相;随后左脚发生摆动相,同时右脚处于单支撑相;然后左脚脚跟着地,并且身体重心向前转变右脚脚跟离地,这个期间是第二次双支撑相;最后左脚处于单支撑相,同时右脚离地发生摆动相.根据这个规律可以得到双脚的步行时相划分,如图5所示.通过计算双支撑相可以有效区分“走路”和“跑步”两种动作,对人体运动识别具有重要作用.
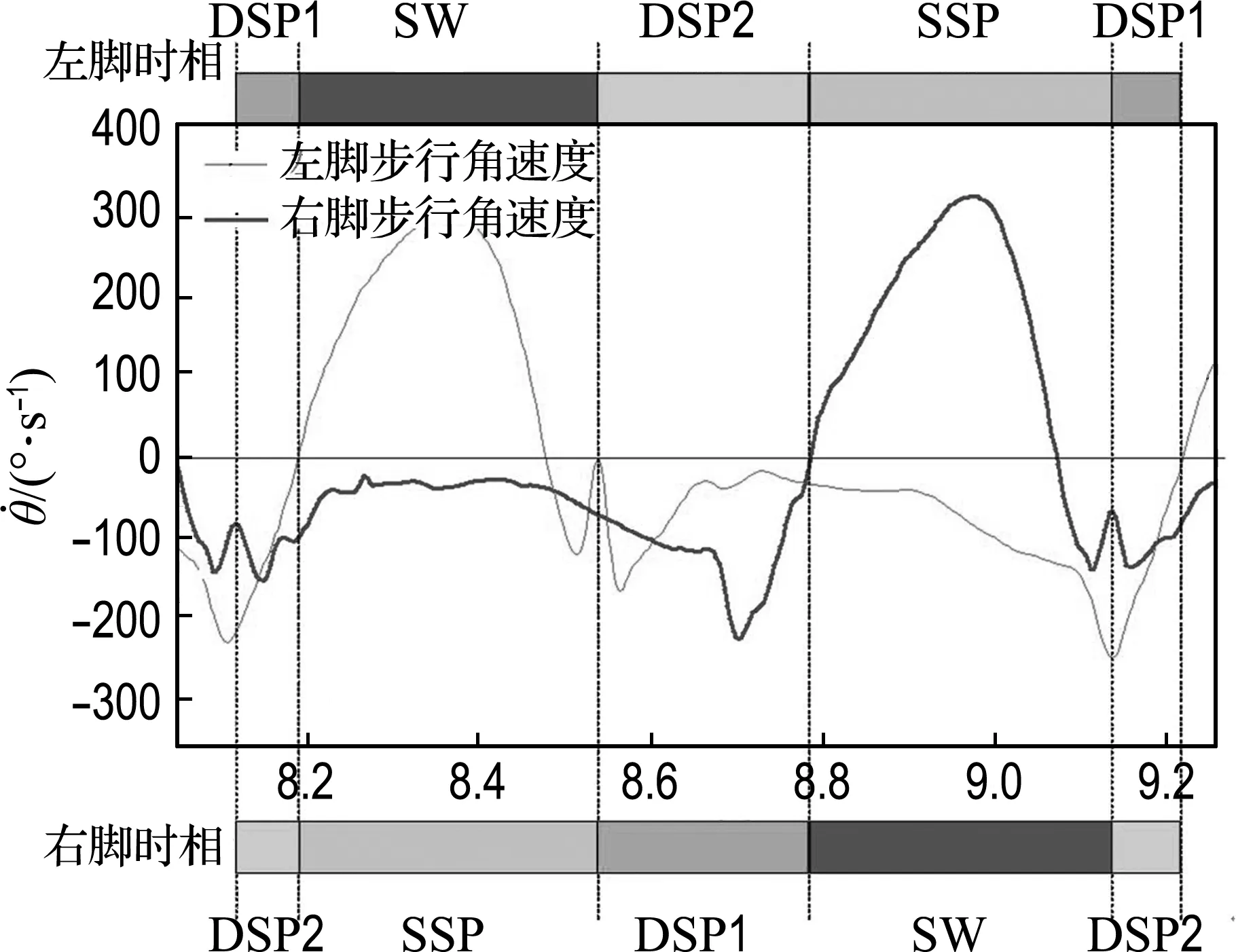
图5 一个步态周期内的双足步行时相划分
3 实验过程和实验结果
实验中采集了6名志愿者(3男3女)的步态数据,并对他们的步态数据进行分析.图6所示为某志愿者正常行走时的左脚x轴加速度、y轴加速度,以及角速度的信号曲线.从图6中可以看到,x轴方向有一个初始1g的重力分量,随后数值累计变化2g左右,这个变化反映出人脚在垂直方向上的运动.y轴(惯性坐标系)与步行方向直接相关,y轴加速度从-2g变化到2g,变化范围4g左右.从图6中还可以看到,在每一步脚跟击地时,y轴加速度在短时间内(不超过0.01 s)有一个剧烈的变化,可以从2g直接跃变到-2g.角速度在摆动期达到峰值,大概在300°/s.对比加速度信号,角速度信号变化比较缓和,在脚跟击地时没有过大的冲击.通过实验数据可以看出本文设计的步行周期划分方法的有效性.文献[16]将惯性器件固定在脚背上,脚跟击地的加速度变化明显小于本文设计方法,本文方法更能准确反映步行过程中脚跟的运动情况.
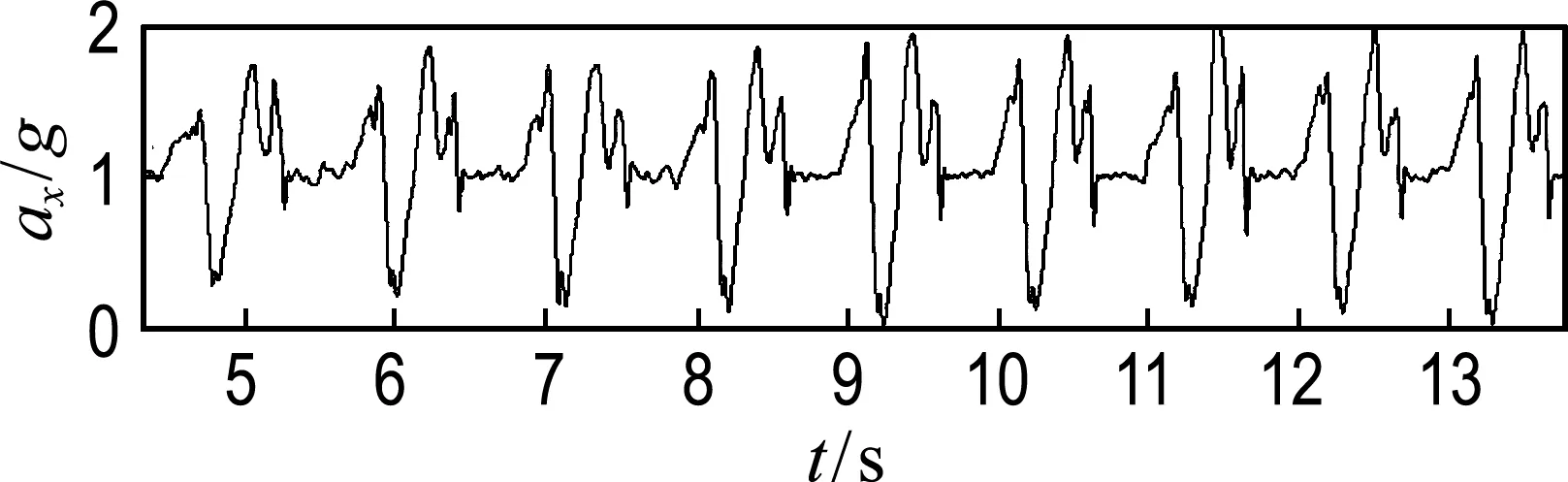
(a) x轴加速度信号
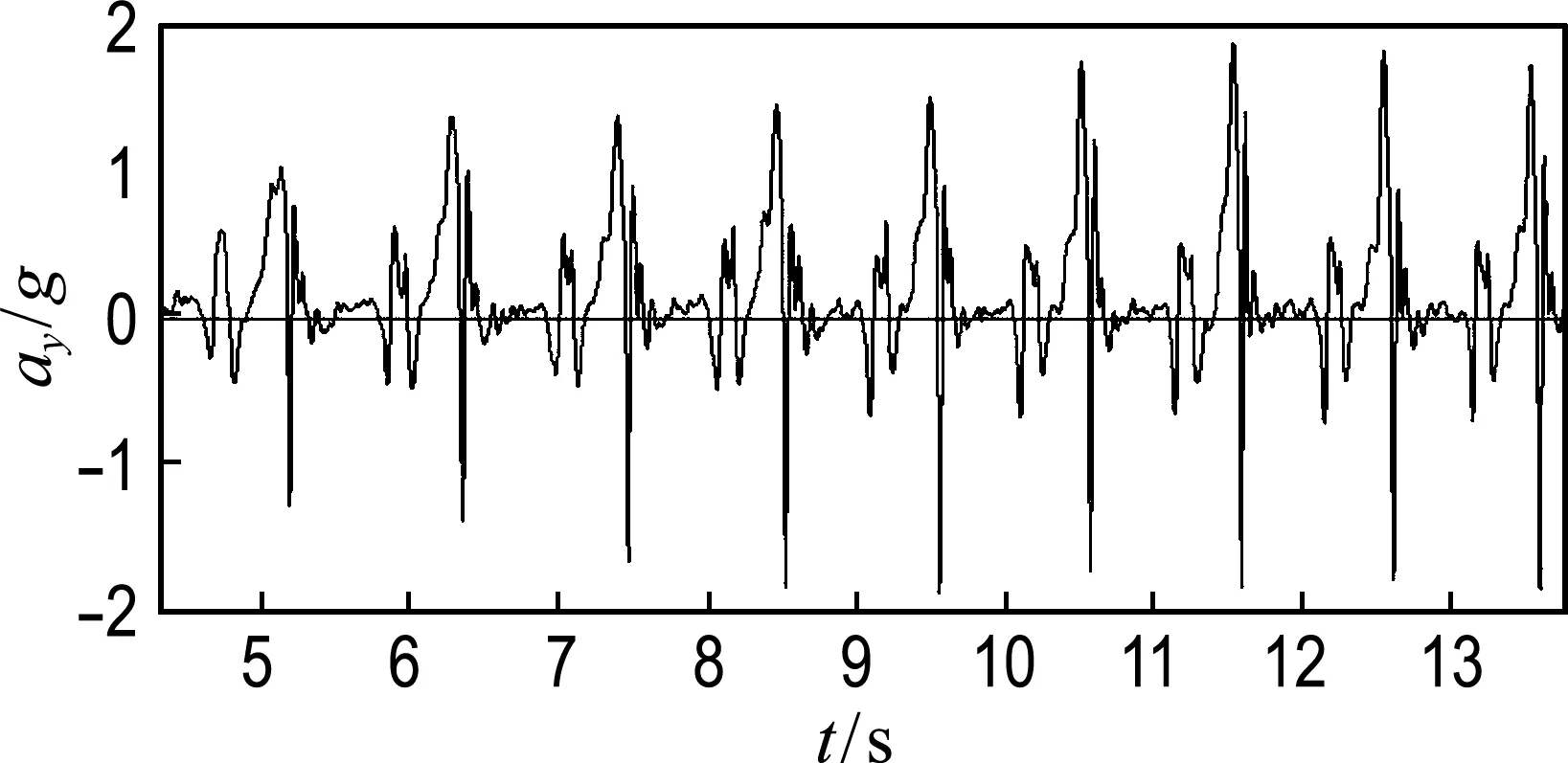
(b)y轴加速度信号

(c) 角速度信号
图6某志愿者左脚步态信号
Fig.6Gait signal of left foot from a volunteer
图7所示是某志愿者正常步行时采集的左右脚的角速度曲线,从中可以看到两个脚交替运动的协调过程.
表2所示是使用本文所提方法计算得到的某志愿者的单脚步行时相,本文给出了从起步开始到第10步的数据,图8所示为每个步行时相占整个步态周期的百分比R.通过表2和图8可以发现,左右脚时相基本对称,右脚摆动相比左脚稍大一点,而脚跟离地稍小一点.本文计算结果与文献[17-19]相比基本一致,但是本文中Ths所占百分比偏小(13%),而Tho偏大(25%).之所以存在差异,首先是因为本文中惯性器件绑定的位置更靠近脚踝;其次不同志愿者的步态不完全一样,因此产生这种差异也是合理的.
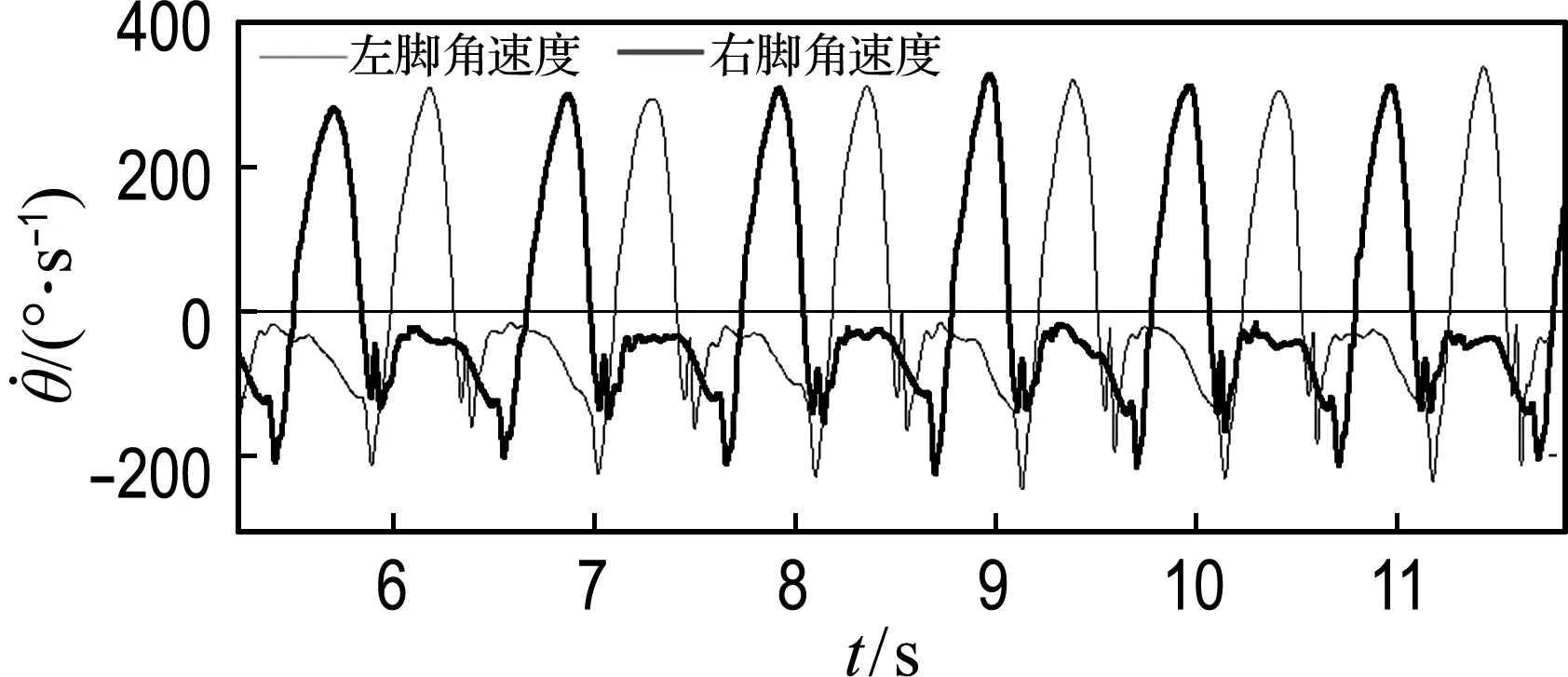
图7 某志愿者双脚步态信号
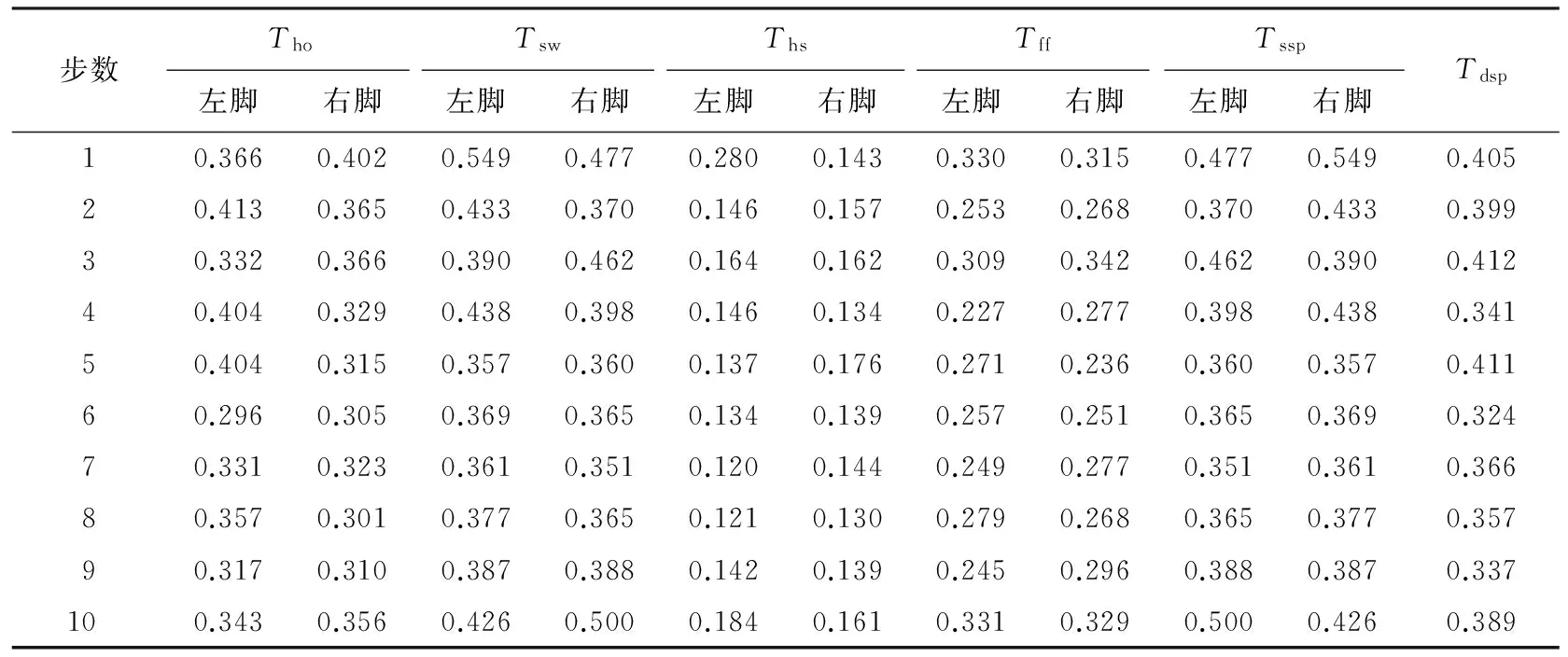
表2 某志愿者步行时相计算结果

图8 左脚步行时相占步行周期的百分比
表3所示是使用本文所提方法计算得到的某志愿者的步长和足俯角的计算结果.从表3中可以看到,志愿者平均步长为1.204±0.219 m;足俯角平均负角度-38.474°±7.878°,这个角度反映了在矢状平面内脚跟向后抬起的角度;平均正角度为65.686°±8.711°,正角度反映了走路的过程中主要在摆动相期间脚逆时针摆动的角度.值得注意的是第一步的步态参数对比后面参数差异明显,例如第一步的负角度和正角度只有-17.381° 和36.295°,而其他步的参数都在-35°和60°附近.产生这个现象是因为志愿者在开始采集数据时是静止的,本文给出的平均值统计中没有包括第一步起步的数据.
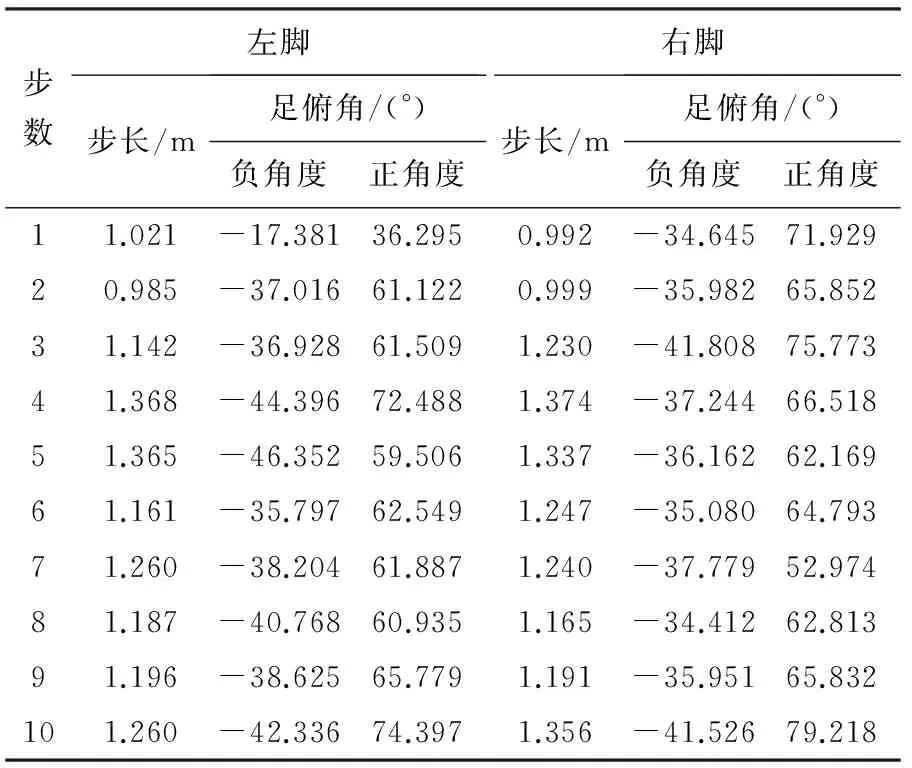
表3 某志愿者步长和足俯角的计算结果
4 结 语
本文提出的双足步态分析系统被用来测量健康人的正常步态,通过无线传感器节点采集到的数据,再使用上面提到的算法分析计算得到正常人的步态参数.为了对测量结果的准确性进行一定的评估,本文在实际测量中使用了其他方法来测量对比系统的计算结果.比如在实际测量时采用秒表对步行周期的测量做了简单的对比,采用视频的方法来估算俯仰角的大小,以及用米尺测量人的步长大小.对比分析表明本文系统分析计算出来的参数具有一定的精度,尤其是在步态周期的测量上有很大的优越性.并且比起其他的方法,本文提出的系统测量方法简单,容易被应用到实际测量中.
[1]ZHANG Xin, Fan G. Dual gait generative models for human motion estimation from a single camera [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2010, 40(4):1034-1049.
[2]LIU Zong-yi, Sarkar S. Improved gait recognition by gait dynamics normalization [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28(6):863-876.
[3]ZHANG Rong, Vogler C, Metaxas D. Human gait recognition [C]// Conference on Computer Vision and Pattern Recognition Workshop, 2004. CVPRW ′04. Piscataway:IEEE, 2004.
[4]Bae Joon-bum, Kong Kyoung-chul, Nancy B,etal. A mobile gait monitoring system for gait analysis [C] // 2009 IEEE International Conference on Rehabilitation Robotics, ICORR 2009. Kyoto:IEEE Computer Society, 2009.
[5]Bamberg S J M, Carson R J, Stoddard G,etal. The lower extremity ambulation feedback system for analysis of gait asymmetries:preliminary design and validation results [J]. JPO Journal of Prosthetics and Orthotics, 2010, 22(1):31-36.
[6]Cuadrado J, Rosa P-V, Urbano L,etal. A force-based approach for joint efforts estimation during the double support phase of gait [J]. Procedia IUTAM, 2011, 2:26-34.
[7]Shiozawa N, Arima S, Makikawa M. Virtual walkway system and prediction of gait mode transition for the control of the gait simulator [C] // 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Piscataway:IEEE, 2004:2699-2702.
[8]Sabatini A M, Martelloni C, Scapellato S,etal. Assessment of walking features from foot inertial sensing [J]. IEEE Transactions on Biomedical Engineering, 2005, 52(3):486-494.
[9]Pappas I P, Popovic M R, Keller T,etal. A reliable gait phase detection system [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2001, 9(2):113-125.
[10]Veltink P H, Slycke P, Hemssems J,etal. Three dimensional inertial sensing of foot movements for automatic tuning of a two-channel implantable drop-foot stimulator [J]. Medical Engineering & Physics, 2003, 25(1):21-28.
[11]O′donovan K J, Kamnik R, O′keeffe D T,etal. An inertial and magnetic sensor based technique for joint angle measurement [J]. Journal of Biomechanics, 2007, 40(12):2604-2611.
[12]WEN Shi-guang, WANG Fei, WU Cheng-dong. Realtime gait kinematics classification using LDA and SVM [C] // Proceedings of the 2011 Chinese Control and Decision Conference (CCDC). Shenyang:IEEE, 2011:592-595.
[13]Lee J A, Cho S H, Lee J W,etal. Wearable accelerometer system for measuring the temporal parameters of gait [C] // 2007 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vols 1-16. Piscataway:IEEE, 2007:483-486.
[14]JIANG Ming, SHANG Hong, WANG Zhe-long,etal. A method to deal with installation errors of wearable accelerometers for human activity recognition [J]. Physiological Measurement, 2011, 32(3):347-358.
[15]QIU Sen, WANG Zhe-long, ZHAO Hong-yu,etal. Using distributed wearable sensors to measure and evaluate human lower limb motions [J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65(4):939-950.
[16]Alvarez J C, González R C, Alvarez D,etal. Multisensor approach to walking distance estimation with foot inertial sensing [C] // 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Piscataway:IEEE, 2007.
[17]QIU Sen, YANG Yu, HOU Ji-jian,etal. Ambulatory estimation of 3D walking trajectory and knee joint angle using MARG sensors [C] // 2014 Fourth International Conference on Innovative Computing Technology (Intech). Piscataway:IEEE, 2014:191-196.
[18]WANG Zhe-long, QIU Shen, CAO Zhong-kai,etal. Quantitative assessment of dual gait analysis based on inertial sensors with body sensor network [J]. Sensor Review, 2013, 33(1):48-56.
[19]Godha S, Lachapelle G. Foot mounted inertial system for pedestrian navigation [J]. Measurement Science and Technology, 2008, 19(7):1-7.
Wireless gait analysis platform based on inertial measurement device
JIANGMing*1,QIUSen2,ZHAOYang1,ZHANGZhi1
( 1.School of Electronic Engineering, Dongguan University of Technology, Dongguan 523808, China;2.School of Control Science and Engineering, Dalian University of Technology, Dalian 116024, China )
The method of quantitative measurement of gait makes a profound influence on many fields, such as clinical medicine, biped robot control strategy and so on. A gait analysis platform is established based on inertial measurement unit (IMU) combining wireless sensor network. Two IMU sensor nodes are bound on the left and right ankles so that the acceleration and angular velocity can be obtained from both sides at the same time and sent to remote terminal. Based on pattern recognition, time series analysis, threshold detection, zero velocity correction and various data fusion methods, the gait parameters are calculated. Furthermore, dual gait parameters, such as the dual stand phase and dual gait period can be obtained by the proposed sensor data fusion method. Dual stand phase detection has an important significance to the human activity recognition. The experimental results show that this study achieves high calculation accuracy.
gait analysis; sensor network; data fusion; gait phase division; dual gait parameters
1000-8608(2016)05-0518-07
2016-05-10;
2016-07-28.
国家自然科学基金资助项目(51407031);广东省自然科学基金资助项目(2016A030313134);广东省高等学校“创新强校工程”创新项目(2014KQNCX221);东莞市社会科技发展项目(2013108101007).
姜 鸣*(1982-),男,博士,E-mail:jiangm@dgut.edu.cn.
TH82
A
10.7511/dllgxb201605012
