基于XML的船舶防污染设备实操评估智能仿真系统开发
2016-10-12王永坚陈景锋
王永坚, 陈 丹, 陈景锋
(集美大学 轮机工程学院, 福建 厦门 361021)
基于XML的船舶防污染设备实操评估智能仿真系统开发
王永坚, 陈 丹, 陈景锋
(集美大学 轮机工程学院, 福建 厦门 361021)
针对当前轮机员实操评估存在的问题及虚拟现实等现代信息技术在船员培训中的创新应用,采用3DSMax等通用建模软件构建具有交互功能的船舶防污染设备仿真场景。以Visual Studio为开发环境,以Ajax为通信手段,综合运用C++程序语言和可扩展标记语言XML设计实现防污染设备实操项目在线评估与训练系统。从系统整体设计结构、高逼真度仿真场景搭建、试题编辑模拟器开发、模糊综合自动评判系统设计及考核评估过程实现等方面详细分析系统的设计过程及其应用功能。经船员考试中心测试、应用,该系统取得了令人满意的效果。
XML; 防污染设备; 实操项目; 智能评估; 仿真
Abstract: Aimed at solving the problems existing in scoring operation skill of marine engineers and introducing modern information technology, such as VR, into the simulator, a three-dimensional scene of marine pollution prevention equipment with interactive features is built with 3DSMax modeling software in Visual Studio environment. The design and implementation of the online training and scoring simulator system of pollution prevention equipment comprehensively applies C++ and XML programming language and Ajax communication design. The simulator system is analyzed in detail and its application functions are described covering the whole design process, the high fidelity simulating scene modeling, the developing of test question compiling simulator, the design of automatic scoring system with fuzzy comprehensive evaluation and the implement of scoring process, etc. Trial operation in the crew test center of MSA gives satisfactory results.
Keywords: XML; pollution prevention equipment; practical operation program; intelligent evaluation; simulation
国际海事组织(International Maritime Organization,IMO)颁布的《经2010年修正的1978年海员培训、发证和值班标准国际公约》及我国海事局2011年颁布的《中华人民共和国海船船员适任考试和发证规则》等与船员适任考试相关的法规对船员实操评估提出了比以往更高的要求。当前,轮机员的实操训练与评估大多采用实物设备,存在受训人员有限、设备不足等问题[1],影响培训质量。针对目前轮机员实操训练与评估存在的不足及虚拟现实等现代信息技术在船员培训中的应用[2],以一艘刚下水的母型船(57 000载重吨散货船)的防污染设备及机舱实际布置为研究对象,设计高逼真度、远程、具有人机交互功能、适用于轮机员实操训练与评估的船舶防污染设备实操评估智能仿真系统。
1 系统开发环境与整体结构介绍
1.1系统开发环境
船舶防污染设备实操评估智能仿真系统二维和三维仿真场景由3DSMax(3D Studio Max)等通用建模软件搭建而成;采用Visual Studio 2013对场景中各操作设备的状态、操作逻辑及人机交互功能进行设计;运用C++语言的程序设计风格多样、支持多种数据库等优点进行程序编写;利用可扩展标记语言XML(eXtensible Markup Language)的数据描述能力[3]强大、易于在任何应用程序中读写数据及拥有嵌套的信息结构等优点进行实操仿真操作时事件绑定和参数变量数据储存等文档的记录。在通过C++解析XML的过程中,系统首先利用DOM(Document Object Model)解析器,运用树状层次结构[4]将每道实操题的XML文件加载到内存中,并构成与之相对应的节点树;然后使用节点(Node)间的邻居、父子等逻辑关系读取这些节点,获取各道实操题XML文档的全部信息。
1.2仿真系统的功能及整体结构
防污染设备实操评估仿真系统是建立在虚拟现实环境中的采用B/S(Browser/Server)架构[5]、可进行全景漫游、具有人机交互功能的仿真考试系统。系统可通过网络,由学员远程利用交互工具(鼠标和键盘)在实操评估仿真系统虚拟场景内完全模拟实际操作环境,进行常规实操项目及设备故障排查项目的训练与考核评估。
整个系统以仿真模型搭建与评估操作界面设计分开进行的方式实现,以使场景模型在不同实操智能题的编辑设置中得到充分利用,便于试题编辑人员利用该系统完成各类实操智能题的编写。仿真系统的整体设计结构见图1。
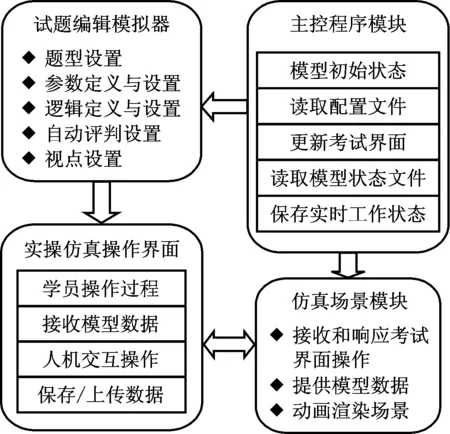
图1 仿真系统的整体设计结构
1) 主控程序模块:通过输出相应的程序命令和数据完成仿真模型的渲染、试题编辑模拟器实操题编辑信息的存储与更新及学员进行仿真操作时各种信息的读取等。此外,系统中其他3部分功能的有机联系也通过该模块实现。
2) 试题编辑模拟器:用于试题编辑人员新增实操试题或对原有试题进行修改、编辑。
3) 实操仿真操作界面:学员可利用该界面完成防污染设备实操题的练习与评估。
4) 仿真场景模块:存放并提供各种具有动画效果的虚拟仿真模型。
2 仿真系统虚拟仿真场景的搭建
防污染设备实操评估仿真系统虚拟现实仿真场景(模型)搭建包括模型搭建、场景优化和场景对象动画设计。仿真场景搭建是指首先通过采集经Photoshop处理的母型船机舱实际布置图、各防污染设备现场图及相关技术资料,综合运用3DSMax和Pro/E(Pro/Engineer)等通用建模软件,完成机舱、油水分离器及生活污水处理装置等防污染设备虚拟场景的搭建;接着在3DSMax环境中对各模型进行灯光、烘焙和抗锯齿处理以提升模型的逼真度,并将模型数据格式转换为*tbd专用格式;最后在3DSMax中加载,使用专用图形渲染引擎TDuExpertor工具将其转换为三维仿真引擎的专用优化格式。
为提高仿真场景渲染速度,通过使用TDuExpertor,采用高倍压缩、优化几何面、合并相近点[6]、改进贴图方式、优化和重复贴图及相同物体采用引用机制等方式对场景模型进行优化。通过以上处理,可获得数据大小级别为10K~2M的场景模型,达到大小与网页中使用的JPEG(Joint Photographic Experts Group)图片大小相同的级别。
为便于在试题编辑模拟器配置文件(XML文件)内根据实际操作步骤和逻辑进行仿真操作过程设计,必须事先在3DSMax环境中对防污染设备场景内的各组成部件设置必要的动画效果,例如:控制箱上的各种旋钮、仪器仪表及管路中的阀门等设备的操作采用旋转命令(变量类型Rotation)获取动画路径,再利用关键帧记录进行动画设置;控制箱上的启动/停止按钮采用点击命令(变量类型Hit)设置动画;对于液体的流动,通过利用不同的触发部件控制粒子流动。图2为具有动画效果的船舶生活污水(黑水、灰水)处理装置仿真场景。
3 实操项目试题编辑模拟器的开发
为便于试题编辑人员和海事主考官根据《海船船员适任评估规范》相关要求,基于已搭建的具有动画效果的防污染设备虚拟仿真场景进行组题操作,系统开发试题编辑模拟器。该模拟器能为不同类型实操题的新增或修改提供可视化的编辑界面,并可对设置好的试题进行模拟测试。利用该模拟器,教练员或评估员也可根据学员的实际能力和考核重点在仿真练习或评估现场临时对原有试题进行修改或重置,保存后重新生成一道实操试题,在方便现场考试的同时提高考务管理效率。

图2 具有动画效果船舶生活污水(黑水、灰水)处理装置仿真场景
3.1试题编辑模拟器的设计
试题编辑模拟器主要由位于编辑界面左侧的导航编辑模块、中部的TDuExpertor仿真场景显示区及右侧的对象属性编辑模块等3个功能模块组成(见图3),各模块的功能简述如下。
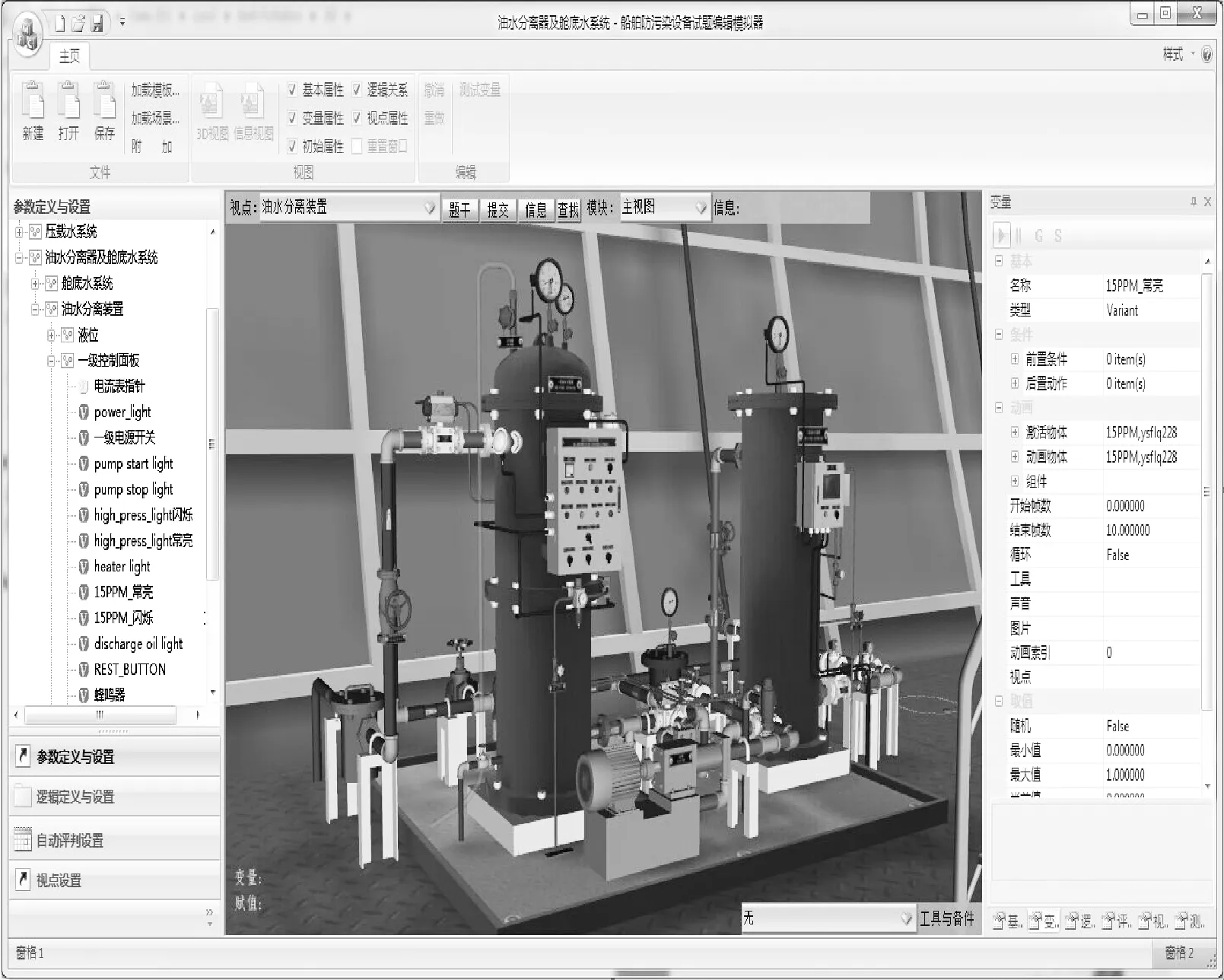
图3 试题编辑模拟器编辑界面
3.1.1导航编辑模块
该模块由参数定义与设置、逻辑定义与设置、自动评判设置和视点设置等4个子模块组成。
(1) 参数定义与设置模块用于定义不同操作对象变量参数的名称并通过“对象属性编辑模块”设置参数范围,这些设置能实时保存在管理数据库配置文件中。
(2) 逻辑定义与设置模块用于新增逻辑变量或对已定义场景变量的名称进行修改,其逻辑功能设置可通过“对象属性编辑模块”完成。
(3) 自动评判设置模块:对于每道实操题,首先设置仿真操作逻辑、操作时间、操作动作的违规严重程度及操作动作是否到位等;接着采用模糊综合评判法,通过学员最终操作时间、操作逻辑、操作准确性和是否完成操作等因素集对学员仿真操作过程进行自动评判。
(4) 视点设置模块用于在仿真操作过程中快速切换到需要的操作设备,在场景内根据设备在操作中的功用设置不同的视点,方便学员根据操作需要切换到相应的界面。
3.1.2TDuExpertor仿真场景显示区
根据实操题的内容和相关要求加载与试题相对应的二维和三维仿真场景;同时,具有实时显示“视点设置”不同视点切换画面及“对象属性编辑模块”新增或修改实操题逻辑条件和状态参数值后场景对象出现的状态变化的作用,便于试题编辑人员进行试题编辑。
3.1.3对象属性编辑模块
对导航编辑模块中的各个变量进行详细描述。例如,选中“参数定义与设置”中的某个对象变量时,对象属性编辑模块将显示该变量详细的内容并可进行参数修改、当前值设置及变量类型改变等操作。通过该模块,教练员或评估员可根据实际需要临时进行实操智能题相关参数修改、变量增减及故障点设置等操作,经程序刷新后在TDuExpertor仿真场景显示区中显示相应的变化。
此外,试题编辑模拟器还设有新建、打开及保存文件和加载场景等功能。
3.2自动评判模块的设计
自动评判模块是防污染设备实操仿真系统的一个重要组成部分,置于“自动评判设置”之中;根据评估规范要求,结合设备实际操作特点,采用模糊综合评判法对其进行设计。
3.2.1选择评价因素
模糊综合评判法的评判因素[7]包括因素集和评价集,其中:因素集是包含影响评判的对象各方面因素的集合;评价集是评判者对评判对象进行评估时可能给出的各种评判结果的集合。根据学员的操作特点和设备故障排查要求,选定操作时间(U1)、操作准确性(U2)、操作完成与否(U3)和故障正确判断与否(U4)作为评价因素。常规操作题因数集取U常规=(U1,U2,U3);设备故障排查题因数集取U故障=(U1,U2,U3,U4)。根据规范要求,考核等级分为正确/熟练(100分,V1)、正确/较熟练(80分,V2)、正确/熟练程度一般(60分,V3)和操作差(40分,V4)等4个等级,建立评判集V=(V1,V2,V3,V4)。
3.2.2确定隶属度和权重
模糊集合Ri=(rij,…,rim)为对第i个考核因素ui的评判结果。rij越大,表明ui与vj之间的联系越密切。[8]单因素评判矩阵是以各单因素评判集的隶属度为行组成的矩阵:
(1)
学员进行实操评估时,各道实操题评价集的单因素隶属度是不同的,系统根据学员每次仿真操作的完成情况来确定隶属度。由于因素集中各因素在评判时的重要程度不同,因此权值也不相同。由各权值组成权重集A=(a1,a2,…,an),根据评估专家和海事主考官的建议,得到常规操作题各因素集权重A常规=(0.2,0.4,0.4);设备故障排查题各因素集权重A故障=(0.15,0.15,0.30,0.40)。
3.2.3建立模糊综合评判模型

(2)
例如,在对某道常规实操题进行评估时,学员最终操作时间为9 min,规定时间为15 min,学员共计操作60步,其中25步与该题无关,最终成功启动油水分离装置。由此可得出单因素评判矩阵:
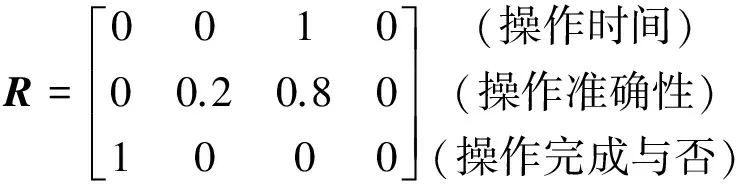
(3)
由权重集A常规=(0.2,0.4,0.4)及式(3),可得B=(0.40, 0.08, 0.52, 0);将B及评价集V=(100, 80,60,40)代入到式(2)中,最终可得学员该题的最后得分为N常规=77.6分,取78分。
此外,评估员也可根据每道实操题的考核重点,通过试题编辑模拟器“自动评判模块”对评价集及因素集的权重进行修改,完成每道实操题自动评分标准的设置。
3.3实操智能题的设置过程
针对防污染设备实操智能题(常规操作题和设备故障排查题)的设置,主要利用试题编辑模拟器强大的试题编辑功能及已建好的具有动画效果的仿真场景来完成实操题的编辑工作,过程简述如下。
1) 试题编辑人员根据《评估规范》对实操项目的要求,通过配置文件(XML)的方式将设置好的试题题干、设备初始状态和操作要求置于模拟器相应区域,供学员训练或考核时实时查看。
2) 在模拟器TDuExpertor仿真场景显示区设置与所设试题一致的仿真场景,并通过模拟器逻辑、参数等定义与设置模块进行命名;同时,在“对象属性编辑模块”中编辑相应的参数和操作逻辑,经程序刷新后在显示区内观察设备的状态变化是否符合要求。
3) 根据试题的考核重点,在“自动评判设置”模块中进行操作时间、操作准确性及故障是否正确判断等评价因素分值和权重的设置,完成实操题评判设置。
4 防污染设备实操项目在线智能化评估过程的实现
防污染设备实操评估仿真系统的终端既可安装在海事主管机关授权的船员考试中心供轮机员实操项目评估使用,也可利用互联网让学员通过实时访问考试中心服务器进行评估前的远程仿真训练。其具体实现流程见图4。
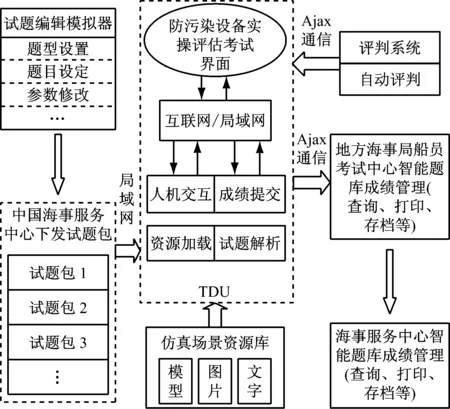
图4 基于B/S结构的船舶防污染设备实操项目智能化评估实现流程
1) 评估时,海事服务中心通过局域网下发已编辑好的实操项目试题包,考试终端接收到试题包后启动仿真系统,完成各功能模块的初始化设置,并根据获取的智能实操题信息从资源库中加载对应的仿真场景。
2) 加载完成后,学员可在考试界面模拟真实的操作环境,完成实操题仿真操作。所有操作步骤、时间、违规情况及操作是否完成等均通过Ajax( Asynchronous JavaScript and XML)通信方式受自动评判系统监控[9];同时,这些操作信息会实时记录在作答信息文件中。
3) 学员完成操作后,点击“提交”或考试时间到,考试终端自动评判模块根据模糊综合评判法对学员的操作结果进行自动评判,给出最终得分;同时,将考试结果和得分情况返回给船员考试中心数据库或上传到海事服务中心的服务器,进行打印、存档;如有异议,可进行成绩查询和溯源。
4.1常规操作题
常规操作题指的是试题编辑专家根据实操题的评估要素,结合实际操作逻辑和参数,利用试题编辑模拟器和虚拟仿真场景编辑的实操试题。这类试题仅限于对场景对象进行常规操作。在考核或练习时,学员在防污染设备实操评估系统上点击已生成的实操题标签,系统通过网络自动加载相应的仿真场景,学员可通过交互工具在场景中选定实操题进行评估考核或练习;操作过程受自动评判系统监控,点击“提交”或考试时间到,系统自动退出并自动进行评判,给出最终得分。图5为二维、三维仿真场景关联生活污水处理装置常规操作实操题交互界面。
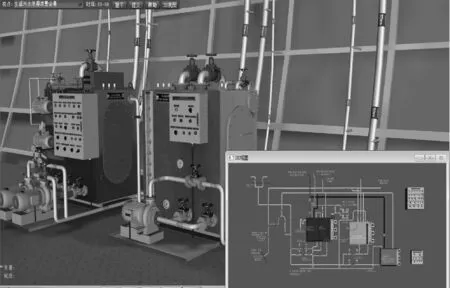
图5 二维、三维仿真场景关联生活污水处理装置常规操作实操题交互界面
4.2设备故障排查题
设备故障排查题在线评估或练习的过程与常规操作题类似,不同之处在于学员开始操作时,考试界面场景中会通过相关仪器设备发出声、光现象,或以仪表直接显示故障时参数及故障问题等方式显示与试题编辑人员所设故障有关的故障现象。考核或练习时,学员首先根据故障现象进行故障问题判断,在确认故障原因并作出相应的解决后才能进行其他常规操作;操作过程实时受自动评判系统监控,点击“提交”或考试时间到,系统自动退出并自动进行评判,给出最终得分。
上述2种类型实操题的评估完成后,每道题最终的操作结果和得分情况将反馈给船员考试中心数据库进行成绩管理。
5 结束语
基于XML的船舶防污染设备实操评估智能仿真系统的开发满足国际公约和国内船员主管机关对船员适任考试实操评估提出的新要求[10],经船员考试中心测试及学员实际应用,取得了令人满意的效果。此外,该系统作为整个轮机智能化考试系统的一部分,其开发设计过程将为轮机实操项目智能化考试系统整体研制提供强有力的技术支持。
[1] 曾青山,陈景峰,黄加亮.轮机模拟器的现状和发展趋势[J]. 集美大学学报(自然科学版), 2003, 8(1): 74-79.
[2] 张欢.海船船员轮机智能考试系统的研究与开发[D].大连:大连海事大学, 2010.
[3] 周宇,吴涛. 用C++语言实现XML文件解析的一种方案[J].光通信研究, 2008(4):25-27.
[4] 张学敏.XML设计方法研究[D].武汉:武汉理工大学,2006.
[5] 张建国, 陈志国, 沈林. 基于网络的智能考试系统研究与设计[J]. 郑州轻工业学院学报(自然科学版),2008,23(3):39-41.
[6] 王东. 基于Web 3D的VRML三维造型及动画技术研究[D]. 四川: 四川大学,2005.
[7] 满若岩, 付忠广. 基于模糊综合评判的火电厂状态评估[J]. 中国电机工程学报, 2009, 29(5):5-9.
[8] 姜为学,邓钦,李宗良,等.某型火控仿真系统模拟训练质量模糊评判[J].弹箭与制导学报, 2007,27(2):300-303.
[9] 王永坚,黄臻臻,杨国豪. Web 3D船舶电站在线考核评估系统的研制[J].船舶工程, 2009, 31(4):67-70.
[10] 东昉,毛洪鑫.STCW公约马尼拉修正案解读[J].中国海事, 2012(5):6-10.
△版权声明△
凡投稿本刊的文章,均视为同意本刊授权的合作媒体和数据库使用,本刊支付的稿酬已包含授权费用。
《中国航海》编辑部
AnIntelligentOperationScoringSimulatorSystemforMarinePollutionPreventionEquipment
WANGYongjian,CHENDan,CHENJingfeng
(Marine Engineering Institute, Jimei University, Xiamen 361021, China)
TP311.52;U664.9
A
2016-04-25
福建省自然科学基金(2016J01251)
王永坚(1972—),男,福建晋江人,高级轮机长,副教授,主要从事轮机仿真技术与船舶动力装置故障分析研究。 E-mail:wyongjian55@qq.com
1000-4653(2016)03-0026-05