农作物智能识别定向施药除草机器人的设计研究
2016-09-28张金美

摘要:农田杂草不仅影响农作物的生长,还会间接助长病虫害的滋生和蔓延。针对目前使用的人工除草、化学除草等方法存在的问题,研究设计一种智能识别农作物定向施药的智能除草机器人,对其设计思路、工作原理以及关键结构等进行详细分析。该机器人采用自动化操作,除草效率高,可实现精准施药,有效保护生态环境。
关键词:除草机器人;智能识别;定向施药;自动化
中图分类号:TP242 文献标识码:A 文章编号:1674-1161(2016)06-0016-03
农田杂草若任其发展不加以有效控制,不仅会影响农作物的生长,降低农作物的产量和质量,而且还会间接助长病虫害的滋生和蔓延[1]。目前,国内常用的除草方法有人工除草和化学除草等方式[2]。人工除草效率低、劳动强度高,已经不适应现代农业的发展需求。化学除草效率比较高,对突发性的草害效果明显,但是化学除草一般都采用喷雾施药,如果除草剂使用不当,不仅会造成浪费多、成本高等问题,还会导致除草剂残留量超标、环境污染甚至人员中毒等严重后果。针对以上问题,国内外专家研究了机械式除草方法,如采用喷雾机等设备施药,但这类方法是向地面均匀地喷洒农药,而不管地面杂草多少或者有无,从而导致农药污染[3]。本课题以农业主导产业中的蔬菜、水果等条播作物为研究对象,根据农田除草的特殊性,设计一种智能识别农作物定向施药的智能除草机器人,以提高除草效率和保护生态环境。
1 智能除草机器人的设计思路及工作原理
本课题研究的智能除草机器人,适用于蔬菜、水果等条播作物田地除草。由于杂草种类繁多,要识别出各种各样的杂草,难度非常大;而作物相对单一,识别较容易。所以设计思路为:1) 在杂草和作物同时存在的作物行内,尝试采用不识别行内杂草而只识别行内作物植株的新方法,即只要识别出作物,在除草时就规避作物除草。这样可以降低自动化操作的复杂程度,从而使智能除草机器人的自动化应用成为可能,有利于提高人力资源的利用率。2) 完成机械除草后,再对杂草残根抹药,实现精准施药,达到彻底除草的效果。精准施药可以减少农药用量,降低生产成本,以及起到保护生态环境的作用,符合绿色农业的发展理念。
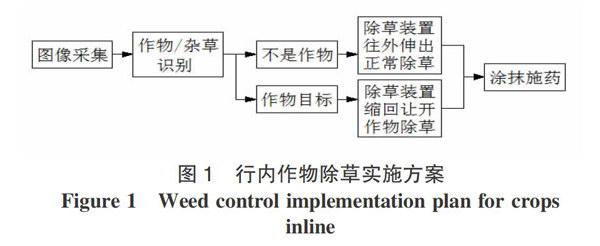
智能除草机器人的工作原理为:1) 该机器人可以沿着作物的行间行驶,改进了现有很多机器人骑在作物行上行驶的方式。骑在作物行上行驶的缺点是机器高度要适应作物高度(机器必须做得比作物还高),而在作物行间行驶就不受作物高度影响。2) 摄像头对作物行内的杂草和作物信息进行采集,如果检测到作物行内是作物时,行内除草装置在控制系统作用下缩回机架,以避开作物;通过作物后,行内除草装置在控制系统作用下再伸出机架,继续行内除草并涂抹施药。3) 行间除草不需识别,直接正常除草并涂抹施药。4) 设计两种并施的除草方式,首先利用除草刀片进行机械式剪锯切断杂草,达到快速除草效果,然后涂抹施药装置再对杂草切口涂抹除草剂,做到精准施药。精准施药与喷洒农药方式相比,药剂注入草体效率高,除草效果更好,同时避免了无效用药,节省了除草剂用量,使农药浪费大大减少。行内作物除草实施方案如图1所示。
2 智能除草机器人的结构设计
该机器人结构设计初步方案如图2所示,主要由工作平台、定位摄像头、计算机、控制器、作物行内除草装置、作物行间除草装置以及除草机器人前行系统(包括轮架系统、电机动力系统、转向判断及实施系统)等组成[4]。作物行间除草装置位于机器的前部,作物行内除草装置位于机器的两侧。集成控制器电控连接计算机、平移气缸、施药装置和除草机器人前行系统。
2.1 作物行内除草装置
作物行内除草装置如图3所示,主要由支架、气缸、导轨、除草刀具装置等组成。气缸为水平安装,用来实现除草刀具装置伸出/缩回的水平移动。作物行内除草装置随着除草机器人平台在作物行间运动,当控制系统检测到作物植株时,除草刀具装置往内缩进,让开作物,通过作物后再行伸出;当控制系统未检测到作物时,除草刀具整体往外伸出,正常除草并施药。由气缸完成刀具整体往里或往外移动。
2.1.1 除草刀具装置 除草刀具装置由上梳齿板、下梳齿板、除草刀片组架系统、除草刀片往复移动机构、抹药装置等组成(如图4所示)。除草刀片设置在上梳齿板和下梳齿板之间。刀片的前侧边沿为刀刃,除草刀片刃口要求做成锯条齿形状,设为动刀片;下梳齿板齿牙的前端也加工成刀刃,设为定刀片,与动刀片密合安装,形成剪切装置。除草刀片的工作过程为:一方面锯条齿形状刀刃往复移动锯切杂草;另一方面由定刀片和动刀片形成剪切杂草的作用。上梳齿板的齿牙前端设置为向下倾斜,倾斜角度约45°,并与下梳齿板齿牙的前端尽量靠近,形成鸭嘴型,这样在除草过程中可以将杂草梳理起来,方便除草;同时可以推起泥土中高凸的硬石子或杂物,避免损伤除草刀片刃口。
2.1.2 刀片往复移动机构 除草刀片往复移动通过偏心轮机构实现。刀片往复移动机构主要由直流电动机、偏心轮等组成(如图5所示)。工作时,电动机带动偏心轮、连杆,使刀片组架系统往复移动,通过下梳齿板的定刀片与往复移动的动刀片配合,对杂草进行有效切割,从而完成除草动作。集成控制器电控连接直流电动机。
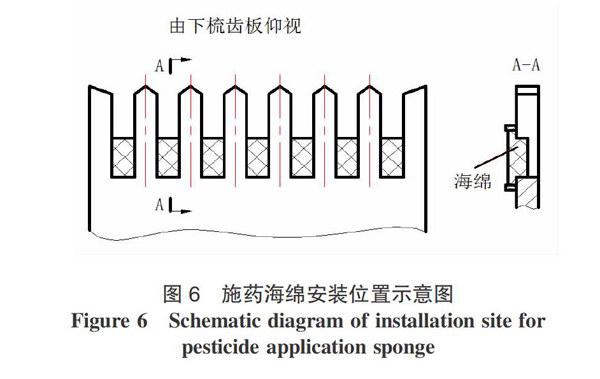
2.1.3 施药的具体结构 施药装置由存药箱、输药管、电控阀、滴药管、施药海绵、湿度传感器等组成。存药箱连接输药管,电控阀设置在输药管的进口上、并与集成控制器连接,滴药管与输药管的末端连接,施药海绵设置在下梳齿板的齿牙间隙后部(如图6所示),湿度传感器通过电路与集成控制器连接。工作时,除草机器人在作物行间运动,作物行内除草装置和行间除草装置通过上梳齿板和下梳齿板梳起杂草并切割,然后施药装置通过施药海绵对刚切割过的杂草切口涂抹施药。湿度传感器检测施药海绵中的含药量,如偏少,由输药管加药进海绵。
2.2 作物行间除草装置
作物行间除草装置与作物行内除草装置中的除草刀具装置相似,由上梳齿板、下梳齿板、除草刀片组架系统、除草刀片往复移动机构、抹药装置等组成,只是宽度略大于作物行内除草装置,刀具结构与两侧面刀具相同。不同的是,作物行间除草装置不用整体移动,而是与机器人平台固定安装。
2.3 作物智能识别及除草装置控制系统
控制系统工作流程为:在执行除草工作前,通过摄像头和计算机软件输入作物的特征标准(如色度、垂直高度下限、水平宽度下限等信息);除草机器人运行时,通过两个定位摄像头采集图像信息,与作物特征标准进行比对,识别出前方作物,并由两个定位摄像头确定作物对机器的方位;当机器行进至回避位置处,由计算机发出指令,控制行内除草装置缩回机架,避开作物;通过回避位置(即作物)后,计算机再发出指令,控制行内除草装置伸出机架,继续除草并涂抹施药。
3 结论
本课题研究设计的智能识别农作物定向施药除草机器人,可同时进行行间除草和行内除草工作。行内杂草需进行识别作物后除草并施药,行间杂草无需识别直接除草并施药。该机器人全部采用自动化操作,除草效率比较高,节约了劳力,适合现代农业大规模少人力的发展模式;同时,通过精准施药,提高了除草实效,避免了无效施药,大大减少了除草剂用量,降低了农业生产成本,从而减轻了农药对土壤和大气环境的污染,可以有效保护生态环境。
参考文献
[1] 郭振升.农田杂草的危害及防除[J].河南农业,2003(9):32.
[2] 范德耀,姚青,杨保军,等.田间杂草识别与除草技术智能化研究进展[J].中国农业科学,2010,43(9):1 823-1 833.
[3] 金小俊.基于双目立体视觉的除草机器人行内杂草识别方法研究[D].南京:南京林业大学,2012.
[4] 张金美,沈建明,陶雄春.漫反射光电开关在除草机器人中的应用[J].传感器世界,2016,22(5):19-22.
Abstract: Weeds not only affect the growth of crops, but also encourage the breeding and spread of pests and diseases indirectly. Considering the current existing problems by using the method of manual or chemical weeding and so on, this paper designed a kind of weeding robot for crops recognition intelligently and pesticide application directionally, and carries out a detailed analysis and study of its design ideas, working principle and key structure. This robot with automatic operation is efficient in weeding, realize precision medicine and protect the ecological environment effectively.
Key words: weeding robot; recognition intelligently; pesticide application directionally; automation
