基于五维光纤传感器的沥青路面动水压力测量的研究
2016-09-27胡小弟周永莲
吕 栋,胡小弟,周永莲,王 富
武汉工程大学资源与土木工程学院,湖北 武汉 430074
基于五维光纤传感器的沥青路面动水压力测量的研究
吕栋,胡小弟,周永莲,王富*
武汉工程大学资源与土木工程学院,湖北 武汉 430074
基于国内外已有的研究成果,介绍了一种自行研发的五维光纤传感器,用于测量沥青路面结构内的动水压力.该传感器应用光纤传感原理,采用十字梁结构将4个光纤传感器固定,并填充水泥混凝土以稳定及保护传感器.将五维传感器埋设于路面,并使之处于饱水状态.当加载车辆以不同速度驶过时,光纤光栅将传递压应变信号,然后由调制解调器接收信号,即可测量出动水压力值.实测结果发现,动水压力呈正负压交替现象,且最大正压力可达到0.115 MPa,最大负压力达到0.073 MPa.各方向的动水压力均不相同,但均随车速递增.
沥青路面;五维光纤传感器;动水压力;现场测量
1 引 言
动水压力是指车辆在运动过程中路面内的水膜不断被挤压,并从轮胎两侧和轮胎花纹间隙排出,于是本来相对静态的水压在挤压作用下产生了一个动态的、瞬时的水压力[1].反复的动水压力促使了沥青与集料间的剥离,进而引发沥青路面水损坏[2].因此,对动水压力的研究十分重要.
目前,国内外许多学者对动水压力进行过不同程度的研究.动水压力的获得主要分两种方法,即为数值分析法和现场实测法.Kettil等[3]通过编制有限元程序来模拟动水压力;张勐等[4]采用FLUENT建立轮胎在桥面行驶的有限元模型,模拟不同行驶速度、不同水膜厚度及不同花纹深度等条件,并计算桥面的动水压力值;汤潍泽等[5]基于Biot固结理论,对实测工况下路面情况进行了动态流固耦合分析,定量研究了路面层内的动水压力长消规律;谭忆秋等[6]则基于多孔介质理论,建立有限元模型,得出动水压力水荷载周期性作用呈周期性正、负压交替;孙立军等[7]自制电磁式流体压强传感器,并发现动水压力随行车速度增加而增长;高俊启等[8]通过自制的单向光纤传感器实测了动水压力,并得出具体的动水压力量值.
本文的试验采用灵敏度高、体积小的布拉格光纤传感器,并在前、后、左、右和下部5个方向分别设置该类型传感器,即从5个方向测量动水压力量值,从而更加准确地得到动水压力的特点及量值.
2 实验部分
2.1五维光纤传感器工作原理
光纤传感器全称光纤光栅传感器,本文采用的布拉格光纤光栅传感器,其作用原理如图1所示.其中,Λ为光栅周期,内层为纤芯层,外层为包层,纤芯的折射率比包层的折射率稍大,是一种使用较强紫外线激光刻录在光纤中心的光学器件,具有波长选择性能,当光波通过光纤光栅时,达到临界条件的波长被反射回来,而其余波长则无损透过,当光纤光栅受到物理或机械特性的变化时,由于弹光效应、热光效应、热膨胀等作用,将引起波长变化[9],通过检测该变化,可获知待测物理量的变化.将该传感器埋设于道路测量动水压力,通过一个弹性增敏元件,感知车辆驶过对路面水的挤压力,即可实时反映动水压力量值.
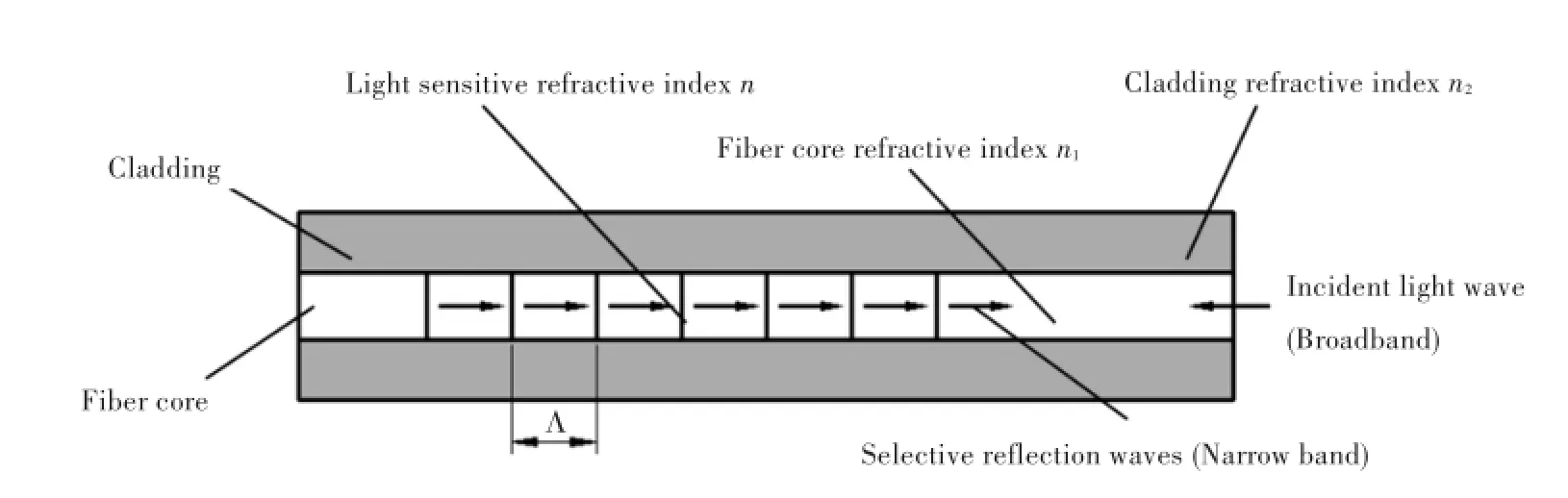
图1 光纤光栅工作原理示意图Fig.1 Schematic diagram of fiber bragg grating
2.2五维传感器的研制
五维传感器是指从5个方向来测量路面动水压力的传感器系统.而一个光纤传感器只能测量一个方向的动水压力,这对研究动水压力的整体情况显得不足.本试验中的五维传感器,是基于单维光纤传感器工作原理,自制夹具从4个方向各固定一个光纤传感器,相对于车辆行驶方向,则分别是前、后、右(左)、竖4个方向,来全面的测量各个方向的动水压力.其中左方和右方受力对称,其动水压力是相等的,故两侧只需一个传感器即可.
光纤传感器属于精密仪器,易于损坏,且体积较小,不易固定;而在实际道路测量中,需要将传感器埋设于路面,接受车辆碾压及动水冲刷.因此在保护传感器不受损伤的同时,还要准确地测量出所需数据,这就需要采取一定的措施.
为了更好的稳固传感器,并保证传感器测试时不受损伤,本研究采用十字梁五维力传感器结构,传感器组件主要由内室、外室、固体填充物、连接筒、光纤传感器等组成.如图2所示.如图2(a),内室为70 mm×70 mm×70 mm的立体空间,主要用于存水;外室为240 mm×240 mm×210 mm的长方体空间,为整个试验系统的外框;连接筒为内径21 mm、外径23 mm的PVC管,用于连接内外室并放置传感器,内外室之间用水泥混凝土浇筑,使整个传感器系统更加稳定牢固,不会因为车辆碾压而遭受破坏,如图2(b).
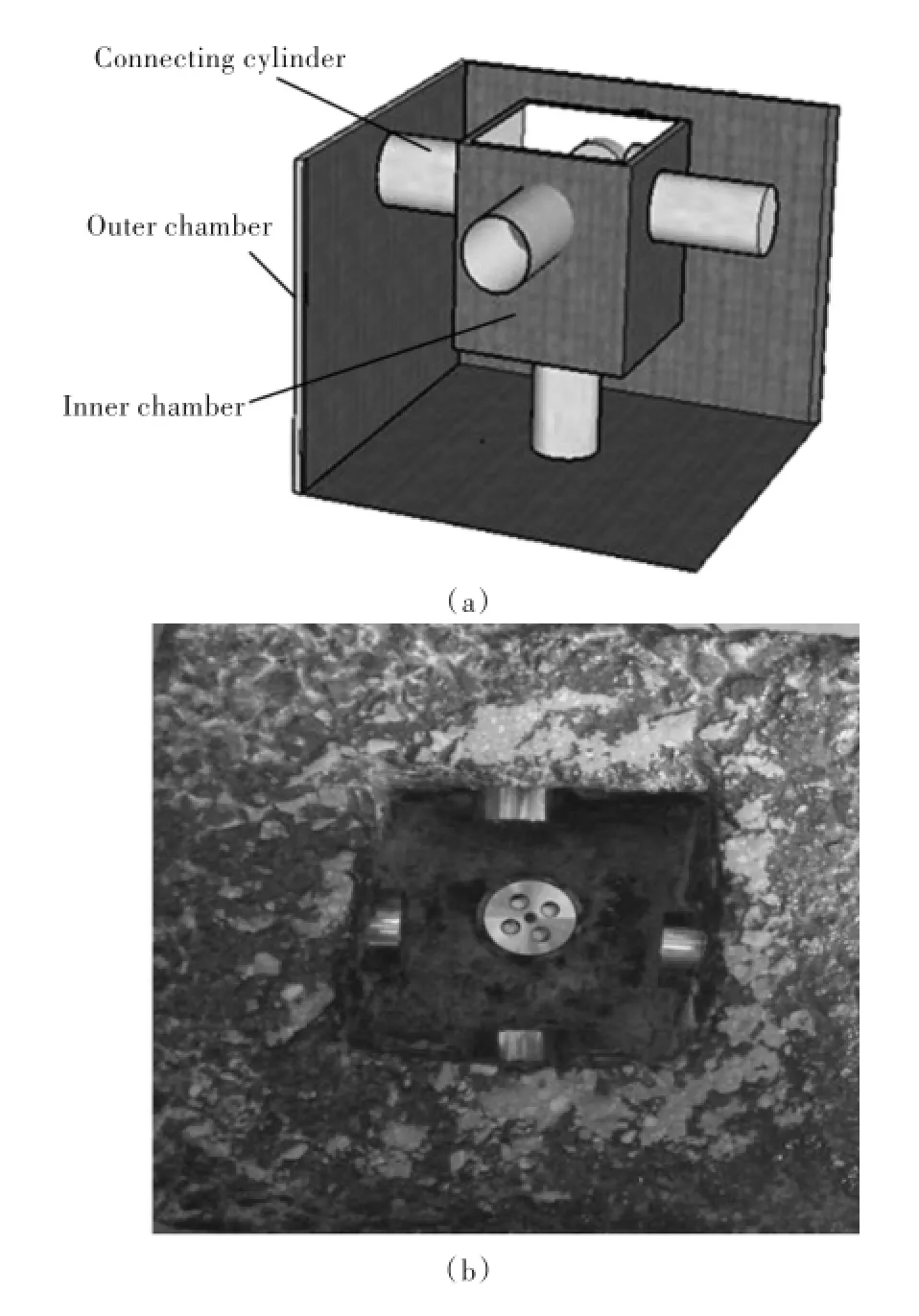
图2 五维传感器结构和外形(a)传感器结构;(b)传感器外形Fig.2 Structure and shape of the five-dimensional sensors (a)Structure of sensor;(b)Sensor shape
2.3试验设备
在五维传感器之外,还需要数据采集设备,以及试验车辆.数据采集设备为Smart Scan Aero光纤光栅信号解调仪,具有高频扫描频率和USB存储功能,适用于各种环境下的高频信号检测.应力传导至光纤光栅,由光纤光栅反射回的光信号通过光纤定向耦合器送到波长分析器,然后通过光探测器进行光电转换,最后由计算机作出分析并存储,并按规定的格式在计算机上显示出被测物理量的数值.
2.4传感器埋设
选定试验路段,在路面切割出一个比五维传感器组件略大的空间,使仪器顶面与路面平齐,并预留光纤通过管道.在传感器组件的中间槽注满水,保持充盈状态,车轮驶过时,轮胎可对槽内水施加挤压力,如图3所示.
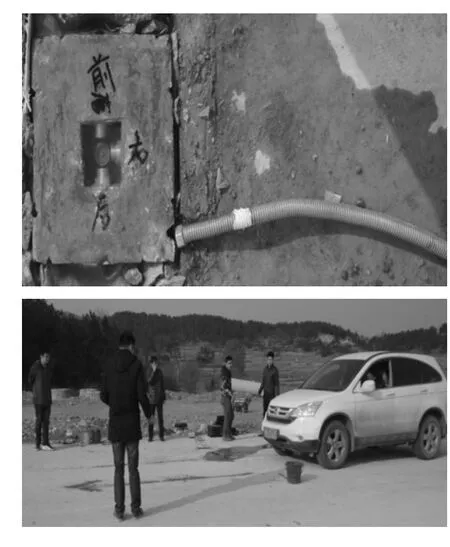
图3 传感器埋设及现场测试Fig.3 Photographs of the embedding sensor and testing on the spot
3 结果与讨论
加载车辆分别以40 km/h、60 km/h、80 km/h、100 km/h等不同的速度,驶过埋设的测试设备上方.图4是加载车速度为80 km/h时各方向动水压力的测量值.

图4 车速为80 km/h时动水压力趋势Fig.4 Variation of dynamic water pressure at the vehicle speed of 80 km/h
由图4可以看出:
1)图形有两个连续波动,分别是前轮和后轮驶过造成的.第一个波动比第二个波动幅度大,说明汽车在快速行驶的时候,前轮冲击水膜造成的动水压力,要高于后轮的作用.
2)动水压力呈正负压交替进行,说明车辆行驶在积水路面时,除了正面冲刷之外,在驶离时还会对路面产生泵吸作用.在加载初期,动水压力快速增长,达到峰值,之后车轮驶离,荷载卸去,动水压力减小,但由于泵吸作用,导致动水压力呈负向.
3)图像显示各方向的动水压力变化规律相似,但具体量值不同,说明车辆驶过积水路面时,路面各方向均会产生动水压力,且都是先增大后减小并呈正负压交替形式,但不同方向的压力大小不同.
为了对比不同车速下的动水压力规律,需要得出具体的动水压力测试结果.不同速度时各方向的动水压力峰值如表1所示.
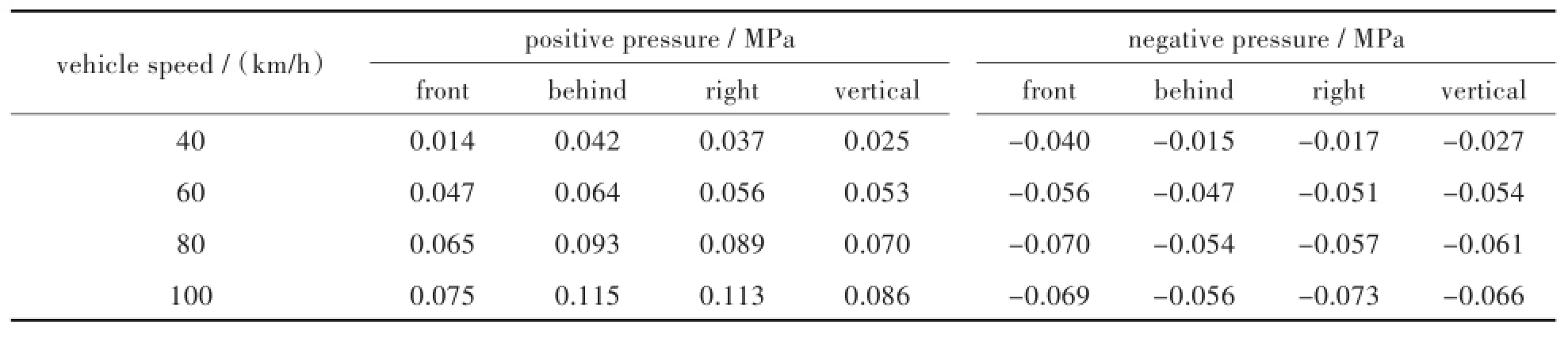
表1 不同速度时各方向动水压力峰值Tab.1 Peak values of dynamic water pressure in different directions under different vehicle speeds
从表1可以看出:
1)当车速不同时,同一方向的动水压力不同,且正向和负向动水压力均随着车速增加而增大;
2)当车速相同时,不同方向的正压力大小顺序均为后>右>竖>前,负压力大小顺序均为前>竖>右>后,正负压力在不同方向的变化顺序恰好相反;也就是说,车辆快速行驶产生的正向动水压力,并不是竖直方向的量值最大,而是车辆行驶方向的反方向量值最大;车辆快速行驶产生的负向动水压力,也不是竖直方向的量值最大,而是车辆行驶方向的量值最大;
3)从量值上看,动水压力的正压力值和泵吸负值,在速度相对较低时,如40 km/h和60 km/h,泵吸负值略高正压力值;而当速度较高时,如80 km/h和100 km/h,尽管泵吸负值低于正压力值,但其量值依然显著.因此分析动水压力对沥青混合料的影响时,不仅仅要考虑其正压力值,还要考虑其泵吸负值.
4 结语
本研究通过自制的五维传感器,测量了不同车速条件下路面前、后、左、右和下部5个方向的动水压力,得到如下结论:
1)研发的五维光纤传感器可有效地测量出路面5个方向的动水压力;
2)动水压力呈正负压交替进行,即车轮驶入时为压应力,产生动水正向压力,轮胎驶离时产生泵吸负压力.从量值的大小来看,泵吸负压力不能忽略.
3)5个方向的动水压力均随车速增加而增大;而车速一定时,不同方向的动水压力大小各不相同,且沿着行车反方向的动水正压力值,要高于竖直方向的值;沿着行车方向的动水泵吸负压力值,也要略高于竖直方向的泵吸负压值.
[1]孙立军,张宏超,胡小弟,等.沥青路面结构行为理论[M].北京:人民交通出版社,2005.
[2] 沙庆林.高速公路沥青路面早期损坏与对策[J].长沙理工大学学报(自然科学版),2006,3(3):1-6. SHA Q L.The premature damage of bituminous pavement on expressway and the countermeasures[J].Journal of Changsha university of science and technology (Natural science),2006,3(3):1-6.
[3]KETTIL P,ENGSTROM G,WIBERG N E.Coupled hydro-mechanical wave propagation in road structures [J].Computers and structures,2005,83(21):1719-1729.
[4]张勐,钱振东,许静,等.钢桥面铺装表面动水压力仿真分析[J].公路,2016,3(3):43-46. ZHANG M,QIAN Z D,XU J,et al.Numerical simulation of hydrodynamic pressure on steel bridge deck pavement[J].Highway,2016,3(3):43-46.
[5]汤潍泽,欧金秋,崔新壮,等.车载引起的沥青路面内动水压力现场试验研究[J].山东大学学报(工学版),2015,45(6):84-90. TANG W Z,OU J Q,CUI X Z,et al.Field test and research on vehicle load induced dynamic pore pressure in asphalt pavement[J].Journal of Shandong university (Engineering science),2015,45(6):84-90.
[6] 郭乃胜,谭忆秋,赵颖华.动荷载下饱水沥青路面黏弹性分析[J].土木工程学报,2012(2):184-190. GUO N S,TAN Y Q,ZHAO Y H.Viscoelastic analysis of saturated asphalt pavement subjected to dynamic load [J].Chinacivil engineeringjournal,2012(2):184-190.
[7] 李少波,张宏超,孙立军.动水压力的形成与模拟测量[J].同济大学学报(自然科学版),2007,35(7):915-918. LI S B,ZHANG H C,SUN L J.Development and simulation measurement of dynamic hydraulic pressure[J]. Journal of Tongji university(Natural science),2007,35 (7):915-918.
[8]蒋泽民,高俊启,季天剑,等.压电传感器测量路面动水压力研究[J].传感器与微系统,2012,31(4):17-19. JIANG Z M,GAO J Q,JI T J,et al.Research on piezoelectric sensor measuring pavement hydrodynamic pressure[J].Transducer and microsystem technologies,2012,31(4):17-19.
[9] 钱亮,黄延,孙娇娜.基于光纤光栅的路面动水压力测量试验研究[J].科技创新导报,2010(26):1-2.
本文编辑:龚晓宁
Measurement of Dynamic Water Pressure of Asphalt Pavement by Five-Dimensional Optical Fiber Sensor
LYU Dong,HU Xiaodi,ZHOU Yonglian,WANG Fu*
School of Resource and Civil Engineering,Wuhan Institute of Technology,Wuhan 430074,China
Based on domestic and foreign studies,a method used for measuring the dynamic water pressure of asphalt pavement by five-dimensional optical fiber sensor was proposed.According to the sensing principl,a five dimensional fiber optic sensor was prepared by fixing four optical fiber sensors on a crossbeam.In addition,the concrete cement was used to stabilize and protect the sensor.Test of dynamic water pressure was conducted by embedding the sensor in the asphalt pavement,which was kept in water-saturated state.When the vehicles passed the test section at different speeds,the signals of compressive strain could be transferred to the modulator demodulator by the fiber grating.Therefore,the dynamic water pressure in different directions could be collected during the whole process.It can be concluded that dynamic water pressure presents a continuing exchanging process of positive and negative pressure.The maximum positive pressure is about 0.115 MPa and the maximum negative pressure is about 0.073 MPa.The dynamic water pressure in all directions varies much,but it all increase with the increase of the vehicle speed.
asphalt pavement;five-dimensional optical fiber sensor;dynamic water pressure;field measurement
U415
A
10.3969/j.issn.1674-2869.2016.03.013
1674-2869(2016)03-0268-05
2016-03-05
国家自然科学基金资助项目(51278389);湖北省交通厅科技项目(2013-731-1-3);武汉市科技计划项目(2014010202010098)
吕栋,硕士研究生.E-mail:977953443@qq.com
王富,博士,副教授.E-mail:wangfu@wit.edu.cn
