基于空间矢量控制的坦克炮塔系统伺服驱动器设计
2016-09-23张晓玲魏宗康
张晓玲,魏宗康,黄 超
(北京航天控制仪器研究所,北京100039)
基于空间矢量控制的坦克炮塔系统伺服驱动器设计
张晓玲,魏宗康,黄 超
(北京航天控制仪器研究所,北京100039)
空间矢量脉宽调制(SVPWM)在运动控制领域已广泛应用,本文研究了基于空间矢量控制原理的坦克炮塔控制系统(简称 “炮控系统”)。空间矢量控制方式的实质是将交流电动机等效为直流电动机,分别对速度和磁场两个分量进行独立控制。此设计是通过空间矢量脉宽调制方法控制永磁同步电机,提出了炮控系统的组成以及系统的硬件设计和软件框图,在实际的应用中提高了炮塔的响应时间及稳定性,取得了良好的应用效果。
空间矢量脉宽调制;永磁同步电机;控制系统
0 引言
炮控系统是坦克火力控制主线末端的执行系统,承担着驱动和稳定坦克炮塔的作用[1],使坦克高速行进时,即便车身上下左右前后的摇摆幅度很大,炮管也可以保持方位角和水平角度的稳定,其性能直接影响炮塔的反应速度和控制精度。
随着坦克电气系统数字化的发展和车辆综合电子系统的应用,数字控制成为坦克炮控系统的重要发展方向。作为控制系统的核心,采用全数字化的伺服控制系统,能够方便地实现控制策略,在应用中取得良好效果。本文提出了一种基于高速数字信号处理器(DSP)和智能型功率模块(IPM)及电压空间矢量控制算法(SVPWM)[2]的交流伺服电动机驱动器的控制方法。
1 系统组成
坦克炮控系统由方位向子系统和俯仰向子系统组成。两个子系统由炮塔传动系统、永磁同步电机、伺服驱动器组成。由于方位向子系统和俯仰向子系统组成和控制原理相同,下文不再单独分别论述。
伺服驱动器[3-4]是整个系统的核心,是实现炮塔运动的中枢,负责接收火控系统发出的指令,并采集开关量输入和电压、电流测量值,通过伺服控制算法,发出驱动指令,并根据位置反馈信息,控制电机运动。
坦克炮控系统设计分为硬件和软件两部分,硬件部分包括DSP控制[5-7]、信号采集、PWM控制和数据处理等控制部分,以及伺服电机的三相电机功率电路两个部分;软件主要包括电压空间矢量算法和系统电流环反馈控制。
炮控系统组成如图1所示。

图1 炮控系统组成Fig.1 Composition of turret control system
2 硬件设计
2.1电机选型
三相永磁同步电机的转子通过永磁体产生稳定且较强的磁场,获得较高的加速度;转矩谐波抖动小,可以平稳调速;因损耗小和转子发热低,极大地提高了电机的功率因素和效率。因而本文的坦克炮塔系统中选用了三相永磁同步电机[8]。
2.2控制系统设计
本文的控制系统包括电源模块、控制模块、功率驱动模块,图2所示是控制系统的组成图。
(1)电源模块
a)控制模块电源
对于嵌入式系统而言,电源的稳定性和可靠性至关重要。本文电源芯片采用 TI公司的TPS73HD318,它可以通过 5V稳压电源,提供DSP内核工作所需要的1.8V电压和DSP外设以及外部存储器等电路所需要的3.3V电压。控制模块的电源原理图如图3所示。
DSP需要双电压(1.8V和3.3V)才能启动内核和外设。其中,内核需要电压1.8V,外部设备如模数转换器ADC、闪存FLASH、事件管理器EVA、EVB等需要3.3V的电压。
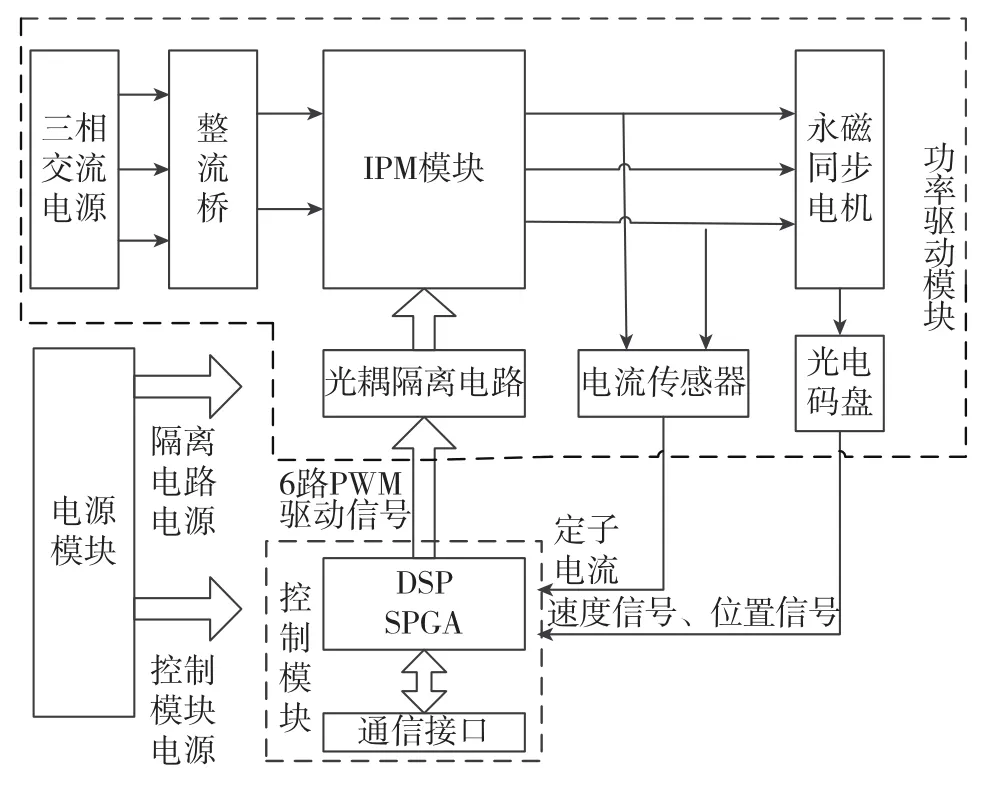
图2 控制系统组成Fig.2 Composition of control system
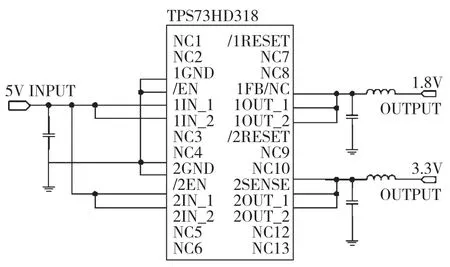
图3 电源原理图Fig.3 Principle of power
b)隔离电路电源
为了提高系统的抗干扰能力,对高速光耦隔离电路提供隔离电源,选用DCP02系列隔离电源芯片,原理图如图4所示。

图4 隔离电源原理图Fig.4 Principle of isolated power
(2)控制模块
本系统采用DSP与FPGA[9-10]相结合,作为控制系统的核心,采用全数字化的伺服控制系统,数字化的控制系统能够方便地实现控制策略。
DSP选用 TI公司的 TMS320F2808,主频为100MHz,可以满足该控制系统的工作要求。FPGA选用ALTERA公司的芯片EP2C8Q208I8。
DSP主要负责完成位置环、速度环和电流环的控制计算,根据位置传感器、速度传感器和DSP内部集成的AD采集的电机电流,与接收的火控计算机指令进行综合计算并输出电机驱动指令PWM信号。FPGA与DSP之间通过数据地址总线进行通信,主要完成位置传感器数据采集、解码,通信数据转换及I/O口扩展的功能。控制模块原理图如图5所示。

图5 控制模块原理图Fig.5 Principle of control module
(3)功率驱动模块
在电机控制领域,逆变器技术已经成为实现高动态驱动性能最有效的方法之一。与带有额外驱动/保护电路的分立的离散功率器件相比而言,IPM将所有的离散元件集成到一个精巧设计的封装中,提供了一种更加全面的高级解决方案。
功率驱动模块首先将三相交流电通过整流桥转换为直流电传送给IPM模块,控制模块输出的PWM信号经过高速光耦隔离电路后传送给IPM的控制端,通过控制IPM内部的三路IGBT驱动芯片的通断,将直流电压转换成可控制的三相交流电,控制伺服电机的运动。同时将电流的采集数据和位置信息实时发送给控制模块。功率驱动模块原理图如图6所示。

图6 功率驱动模块原理图Fig.6 Principle of power drive module
3 软件设计
软件设计是为硬件平台服务的,控制系统程序主要包括DSP系统初始化程序、位置控制程序、电压空间矢量控制(SVPWM)的生成函数和电流传感器的采样函数,系统程序流程图如图7所示。

图7 程序流程图Fig.7 Flow chart of program
软件编程环境采用TI公司开发的功能强大,操作灵活的集成化开发环境(Code Compose Studio,CCS)。
(1)DSP系统初始化程序
在DSP系统上电之后到进入系统之前,需要对系统的各个模块进行必要的初始化配置,才能够使系统正常运行。
(2)位置计算程序
为了保持炮塔位置[11]准确性,需实时计算位置,并发送速度指令驱动炮塔运动。
(3)SVPWM程序
数字信号处理器DSP通过函数生成电压空间矢量的波形,调用系统的事件管理器(EVA)来生成6个PWM波形,控制电压型逆变器工作。
(4)电流传感器的采样函数
模数转换器ADC的采样函数以及数字滤波子程序,监视系统的电流量,形成对系统的电流环反馈控制。
3.1系统初始化程序
在系统经过上电引导程序之后,进入各个系统模块的初始化操作。包括看门狗设置、锁相环PLL选择、外设中断PIE的设置、Flash存储器的设置,以及需要用到的事件管理器EVA和模数转换器ADC的设置等。系统初始化程序流程图如图8所示。

图8 系统初始化程序流程图Fig.8 Flow chart of system initialization
3.2位置计算程序
接收火控计算机发送的位置指令,并根据位置传感器实时计算,发送速度指令给电压空间矢量控制程序。位置计算程序流程图如图9所示。

图9 位置计算程序流程图Fig.9 Flow chart of position calculation
3.3SVPWM程序
SVPWM算法的目的是通过不同矢量的组合合成新矢量,来逼近基准圆,从而在电机线圈上生成圆形磁场。SVPWM算法的作用是通过控制DSP控制模块的PWM输出波形,来控制逆变器的开关模式,以达到产生有效矢量来逼近基准圆形磁场的目的。
一个完整的磁链圆被分为6个主要的矢量空间。如图10所示,描述了产生第一矢量空间的PWM波形图。
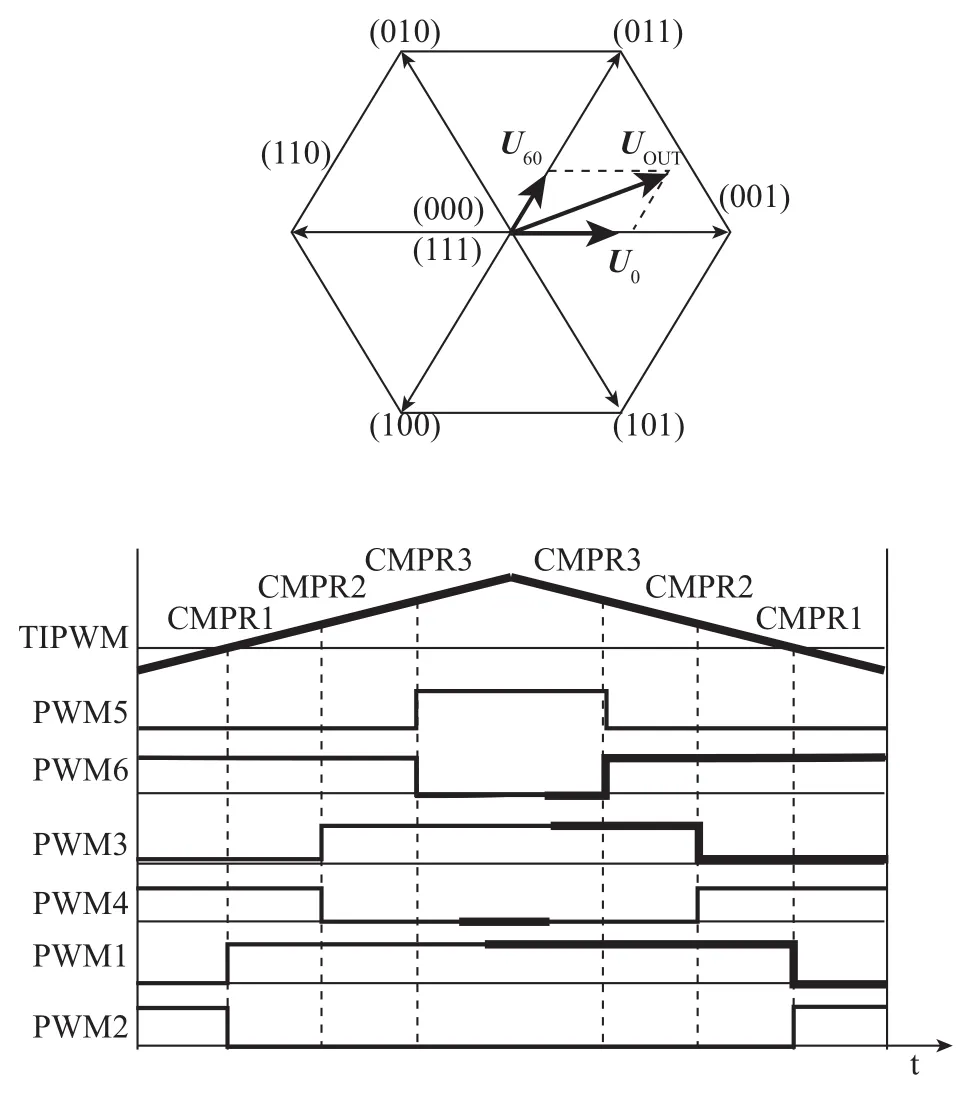
图10 第一矢量空间波形图Fig.10 Waveform of the first vector space
首先采样Ia和Ib的电流反馈信号值,判断定子电流空间矢量是否与d轴正交。然后进入电流矢量变换控制环,即d-q轴电流PI调节器。然后进行坐标逆变换,进行SVPWM计算,完成一次中断处理。SVPWM程序流程图如图11所示。
在SVPWM程序的软件设计中,将电机的两个重要的属性,电机的转距(torque)和转速(speed)作为形式参数带入函数中。矢量有两个重要的参数,分别是模和角度。矢量的模对应了转距,矢量的角度变化快慢对应了电机的速度。

图11 SVPWM程序流程图Fig.11 Flow chart of SVPWM
3.4电流采样程序
在实际的SVPWM生成过程中,还需要不断地采样电流值以防止过电流或短路情况的出现。而且要根据采样的电流值,判断定子电流空间矢量是否与d轴正交。电流采样程序流程图如图12所示。

图12 电流采样程序流程图Fig.12 Flow chart of current sampling
4 试验验证
针对炮控系统的要求,对本系统的响应速度及精度进行了测试。将伺服驱动器和电机安装到炮塔模拟工装上,分别给系统发送20°的阶跃指令和180°的正弦波指令,测试曲线图如图13和图14所示。
通过对测试数据的分析,炮控系统最大运转角速度为42(°)/s,稳态精度小于0.01°,完全满足坦克炮塔系统性能指标的要求。

图13 阶跃曲线图Fig.13 Step curve

图14 正弦波曲线图Fig.14 Sine curve
5 结论
本文主要设计了坦克炮控系统的组成、工作原理、硬件设计和软件程序结构。充分利用了三相永磁同步电机和空间矢量控制的优势,优良的结构、重量轻、体积小、损耗少、效率高、节电效果明显的优点,极大地提高了坦克炮控系统中炮塔的响应时间、稳定性、可靠性及测试的数据精度和准确性。这不仅为坦克炮控系统提供了有力保证,而且在坦克炮控系统的设计中取得了良好的效果。随着电机制造与控制技术的进一步发展,基于空间矢量控制的交流永磁同步电动机控制系统将有着很好的应用前景。
[1] 刘伟,郭保全,潘玉田,杨栋.新型坦克炮控交流调速系统控制策略[J].火力与指挥控,2011,36(2):141-143. LIU Wei,GUO Bao-quan,PAN Yu-tian,YANG Dong.A new strategy of the AC regulating system for tank gun control[J].Fire Control&Command Control,2011,36(2):141-143.
[2] 吴恒,王淦泉,陈桂林.一种混合矢量SVPWM在PMSM控制器中的应用[J].科学技术与工程,2010,10(5):1156-1162. WU Heng,WANG Gan-quan,CHEN Gui-lin.The application of PMSM controller based on a mixed vector SVPWM [J].Science Technology and Engineering,2010,10(5):1156-1162.
[3] 余景铭,王军政,刘治钢.交流永磁同步电机全数字驱动器设计与实现[J].电力电子技术,2009,43(3):39-41. YU Jing-ming,WANG Jun-zheng,LIU Zhi-gang.Design and realization of full-digital driver for permanent magnet synchronous motor[J].Power Electronics,2009,43(3):39-41.
[4] 潘策.全数字交流主轴伺服驱动器的设计[J].组合机床与自动化加工技术,2012(9):70-71. PAN Ce.The design of high-performance digital AC spindle servo drive system[J].Modular Machine Tool& Automatic Manufacturing Technique,2012(9):70-71.
[5] SHI Rong-shen,SU Dong-hai.The design of control system of servo turrent based on DSP[J].Modular Machine Tool&Automatic Manufacturing Technique,2006(3):64-65.
[6] YANG Jian-guo,JIN Jian-jun.Design of AC servo controller for X-Y table based on single DSP[J].Journal of Engineering Design,2007,14(1):35-38.
[7] ZHANG Xing-guo,DANG You-yun.Design of PMSM AC servo control system based on DSP[J].Journal of Xi'an Polytechnic University,2009(6):115-119.
[8] 樊东,周国荣.永磁同步伺服电机智能控制器的研制与开发[J].计算机测量与控制,2006,14(3):324-326. FAN Dong,ZHOU Guo-rong.Development of PM synchronous servo motor drive intelligent controller[J].Computer Measurement&Control,2006,14(3):324-326.
[9] Pang Hai-yan,Xie Yun,Xiao Shan-shan,Chen Bingcheng.DesignandimplementationofSVPWMservo control system based on FPGA[J].Computational Intelligence and Industrial Applications,2009(2):333-336.
[10] CHEN Bing-cheng,XIE Yun,CAI Shu-ting.Design of AC motor servo control system based on FPGA[J].Informationization,2009,28(16):26-29+33.
[11] YIN Hong-mei,WANG Mu-lan,HE Chuan.Researching on control strategy of PMSLM position servo system based on SVPWM[J].Machine Design&Research,2014,30 (1):72-74.
Design of a Servo Driver for the Tank Turret Control System Based on SVPWM
ZHANG Xiao-ling,WEI Zong-kang,HUANG Chao
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
Space vector pulse width modulation(SVPWM)has been widely applied in the field of motion control,this paper studies the tank turret control system based on SVPWM.The essence of SVPWM of AC motor is equivalent to a DC motor,respectively independent control of the speed and magnetic field.This paper presents that a permanent magnet synchronous motor is controlled by choosing SVPWM.System composition,hardware design and software block diagram are introduced.In practice,the system can obtain good effects in many aspects such as improving the response time and stability of turret.
space vector pulse width modulation(SVPWM);permanent magnet synchronous motor;control system
U666.1
A
1674-5558(2016)03-01086
10.3969/j.issn.1674-5558.2016.03.015
2015-03-12
张晓玲,女,博士,工程师,研究方向为导航、制导与控制。
