无人直升机任务规划系统研究与实践
2016-09-23陈昶昊陈学江2胡小平郑立岩3
陈昶昊,陈学江2,胡小平,郑立岩3
(1.国防科技大学机电工程与自动化学院,长沙410073;2.陆军航空兵学院航电和兵器工程系,北京101123;3.潍坊天翔航空工业有限公司,潍坊261000)
无人直升机任务规划系统研究与实践
陈昶昊1,陈学江2,胡小平1,郑立岩3
(1.国防科技大学机电工程与自动化学院,长沙410073;2.陆军航空兵学院航电和兵器工程系,北京101123;3.潍坊天翔航空工业有限公司,潍坊261000)
无人直升机任务规划系统对于完成超视距侦察、监控能力和打击是非常重要的。本文分析了无人直升机任务规划系统的的基本体系结构和功能模块,研究了无人直升机任务规划系统的建模技术及其优化算法,并在V750无人直升机上进行了验证。
无人驾驶;直升机;任务规划系统;飞行控制;自主控制
0 引言
高效能无人直升机系统的研制及其作战使用离不开任务规划系统的支持。无人直升机任务规划系统是一个无人在回路中的大型计算机系统,它的主要任务是要根据无人直升机的数量及任务载荷的不同,对各架无人直升机进行任务分配;根据无人直升机的飞行性能、机载任务设备的性能、无人机和地面系统的通信数据链、战场电磁和气象环境,以及地图测绘系统、卫星侦察系统和其他情报系统提供的战区地图资料、敌方防空系统部署情况等,为无人直升机规划出安全系数最大,作战效能(如干扰性能、侦察性能、突防概率等)最高的飞行航线;根据任务规划系统的建模技术及其优化算法编排出无人直升机在飞行过程中对各种事件应该采取的动作程序,并制成相应的数据库和磁盘,输入机载计算机。无人直升机起飞后则根据在计算机程序中编排的飞行动作进行作战飞行(或依次飞向目标)。
无人机任务规划在我国没有得到广泛应用,我国的许多战术无人机至今还没有装备任务规划系统,在自动任务规划方面理论和技术储备较少。虽然在国内对路径规划问题进行过许多研究,发表了许多论文,但大多数的文献仅仅提出了路径规划(路程最短、燃料消耗、损耗风险等)的计算方法,而路径规划仅仅描述了任务规划过程的一部分。
无人直升机任务规划系统,不仅是无人直升机作战性能的倍增器,而且是无人直升机武器系统的重要组成部分,也是无人直升机武器控制系统的地面设施(地面控制站)。在无人直升机研制阶段,无人直升机任务规划系统对于协调无人机各分系统的战术/技术性能,发挥无人直升机的综合效能起着十分重要的作用。在无人直升机作战使用过程中,无人直升机任务规划系统起着领航员的作用,同时代替飞行员对无人直升机进行高层控制、决策与管理。另外无人直升机任务规划系统作为无人直升机武器系统的作战使用软件,对于充分发挥无人直升机系统的作战性能具有重要作用。可以说,无人直升机任务规划系统在无人直升机系统研制和作战使用的结合上发挥着十分重要而独特的作用。
无人直升机任务规划系统的目的是根据无人直升机任务载荷、无人直升机的数量及作战任务的不同,对各架无人直升机进行合理的任务分配,以保证完成任务的时间,并且总的油耗及威胁最小。从时间上来说:无人直升机任务规划分为预先规划和实时规划。预先规划是在无人直升机执行任务前,由地面控制站制定的,主要是综合任务要求、地形环境和无人直升机任务载荷等因素预先进行规划;实时规划是在无人直升机飞行过程中,根据实际的飞行情况、环境和战场出现的新威胁分布对先前规划进行修改,因此又叫重规划。从层次功能上来说,无人直升机任务规划可包含航路规划、任务载荷规划、数据链路规划和系统保障与应急预案规划等。本文研究的无人直升机任务规划研究的重点是任务分配优化及航路规划。无人直升机任务规划实现无人直升机种类、数量等资源的实时、动态合理调配,以便提高无人直升机侦察、决策、打击、评估等的时效性。
1 任务规划系统的基本功能和结构
1.1任务规划系统的基本功能
在无人直升机战术控制系统中,任务规划系统是实现无人机控制决策的核心部分。任务规划系统包括实时的战术任务控制和非实时的作战任务规划两部分功能。
其中,非实时功能包括:飞行前的战场数据处理、任务计划编制(包括空域管制计划、航路计划、载荷计划、通信配置计划、控制权计划等)、任务推演评估、任务计划输出,以及飞行过程中的任务监视和动态任务规划等。实时功能主要是监视和控制任务计划的执行,包括系统自检监视、飞行器状态监视、任务状态监视、战场情报态势显示、交互控制、飞行任务控制、载荷控制、授权控制以及任务执行评估等。具体包括:
1)任务分配功能。通过任务规划系统在多任务、多目标及多无人直升机之间进行合理规划,充分考虑无人直升机载荷及其性能的不同,合理调配无人直升机及其载荷资源,实现时间及代价最小化,并完成既定任务。
2)航路规划功能。制定无人直升机的起飞、降落、接近监测点、侦察监测区域、离开监测点、返航及应急飞行等。
3)仿真演示功能。主要包括无人直升机飞行仿真演示、武器威胁仿真演示、侦察效果演示。
1.2任务规划系统的结构
无人直升机任务规划系统由任务规划站(内核)、规划算法组件、任务推演评估子系统以及多个无直升人机控制台等组成。如图1所示,每个控制台对1~4架无人直升机进行远程监视、控制和管理。
控制台主要承担系统的实时监视和控制任务计划执行的功能,包括系统自检监视、飞行器状态监视、任务设备状态监视、战场情报态势显示、交互控制、飞行任务控制、载荷控制、授权控制以及任务执行评估等。
任务规划站是任务系统的核心,与具体的无人直升机无关,主要承担非实时规划决策功能,包括任务规划系统的基本输入/输出、数据库服务器、战场数据处理、任务管理、任务计划编制、任务监视以及动态任务规划等。
规划算法组件是按任务规划站要求的算法组件规范封装的,是特定的飞行器、任务设备相关的规划算法程序(比如V750无人直升机、分布式干扰型、反辐射型、“长箭”等各种无人机的规划算法)。规划算法组件可以根据任务需要选择和加载,由规划站的任务管理模块协调运行。
任务推演评估是无人机任务规划系统的可选功能。任务推演评估子系统采用交互仿真和可视化技术对任务规划站提供的无人机作战任务计划进行仿真推演,模拟和展示无人机作战任务计划的预期动态效果,便于指战人员了解和评估任务计划的效能。
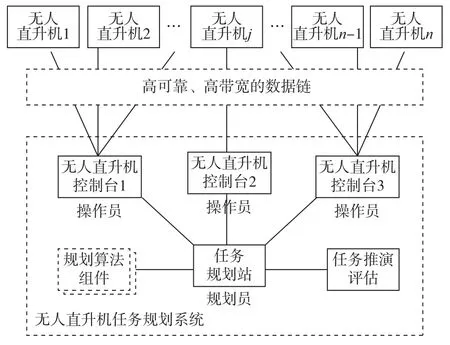
图1 无人直升机任务规划系统的结构Fig.1 The organization for mission planning system of pilotless helicopter
2 任务规划系统的设计
无人直升机的通用任务规划系统技术方案和主要技术途径包括以下几个部分:
(1)任务规划站(内核)技术方案及实现方法
①任务管理模块
任务管理是任务规划过程的协调控制层,主要对任务规划过程进行协调和控制,承担了数据维护、运行协调和资源配置等职责。任务管理的引入,降低了任务规划过程的复杂程度,使得若干局部功能的模块能够合作起来共同完成一项复杂的任务。
②分布计算节点管理
目前的分布计算管理DCM软件包括节点管理和分布式计算环境监控两部分,采用基于XML的报文和公用广播机制进行协作。
③任务执行评估
任务监控模块负责监视当前任务规划的执行进展并评估系统成功执行当前规划的能力,监视当前进行重新规划所需事件的状态(系统或任务环境的状态变化、任务目标或约束条件的改变),通过选择合适的规划算法以及定义算法的输入来决定重新规划的种类等。
④任务重规划
在任务执行过程中,下列因素或事件都可能导致无人直升机任务重规划:作战方案更改、态势变化影响原任务计划的执行、任务评估认为系统执行当前任务计划的能力不足、突发威胁危害原任务计划的执行等。
重规划算法根据事件状态的变化进行动态任务规划,使无人机按照新的航线及任务特征完成新任务,或根据地面指挥系统的指令,使其在空中调整攻击任务,并进行二次目标装订。在无人机上事先可装订多个目标区,且根据地基系统的指令,在飞行中更改目标区。在目标区发生改变时,动态生成飞行航路和任务特征,并动态调整飞行策略和飞行航线。
(2)无人直升机控制台技术方案和实现方法
无人直升机控制台监控一架或多架无人直升机,对所管辖的无人直升机的系统状态和载荷进行监控,监视任务计划的执行情况,掌握局部战场态势,在受限的情况下通过动态任务重分配对无人直升机任务计划进行调整,如图2所示。
任务规划单元制定任务计划,并分发给参与作战行动的相关控制站。无人直升机在正常情况下将按照预先给定的任务计划进行飞行,当飞行中的环境条件超出了预先给出的使用条件时,紧急情况下,为了缩短响应时间、提高无人直升机的高速性和高机动性,无人机控制台通过动态任务重分配对无人机进行调整,必要时手动控制无人机。
①控制台系统的设计考虑下列原则
最大程度地采用通用硬件、软件支持不同的无人直升机和载荷;在控制台设备配置之间最大程度地提供通用性,最小程度地配装无人直升机飞行关键硬件软件;控制台系统最小程度影响无人直升机及载荷改进与升级,规划站系统升级与改进对控制台系统的影响最小化。
②飞行器状态监视
在无人机任务执行过程中,对无人直升机的各种状态指标的监视,包括飞行器飞行状态、飞行速度、燃油余量、航程等。飞行器状态信息可以通过仪表板显示。操作员根据所获反映工作性能的信息,确定无人直升机及其载荷是否正常工作,对可能出现的异常和故障进行早期诊断、预警,为提供应急处理建议提供依据。
③任务状态监视
任务状态监视的目的是了解无人直升机任务执行情况。控制台监控的数架无人直升机中的一架,直接以图形方式动态刷新显示,操作员可以方便地在数架无人直升机之间进行切换,可以简单查询任务状态的相关信息,及时掌握任务执行情况,为紧急情况下的动态任务调整提供依据。
④战场情报态势显示
战场情报态势显示和任务状态显示的界面类似,不同的是战场情报态势显示界面中信息量更多。将更多的态势情报标绘在界面上,可展现整个编队的飞行态势,并显示诸如威胁、气象等情报。操作员可以查询编队中其他无人直升机的状态信息。
⑤任务执行评估
通过对任务计划、平台能力、系统状态、监视异常信息的分析,任务执行评估模块估计当前是否能够完成任务计划。任务执行评估模块集成在战术任务控制操作环境中,如图3所示。
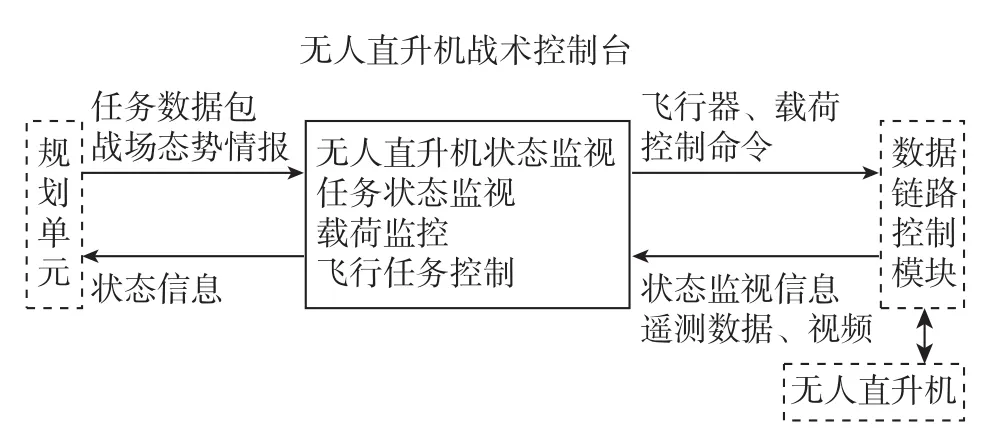
图2 无人直升机战术控制台系统Fig.2 The tactics console system of the pilotless helicopter
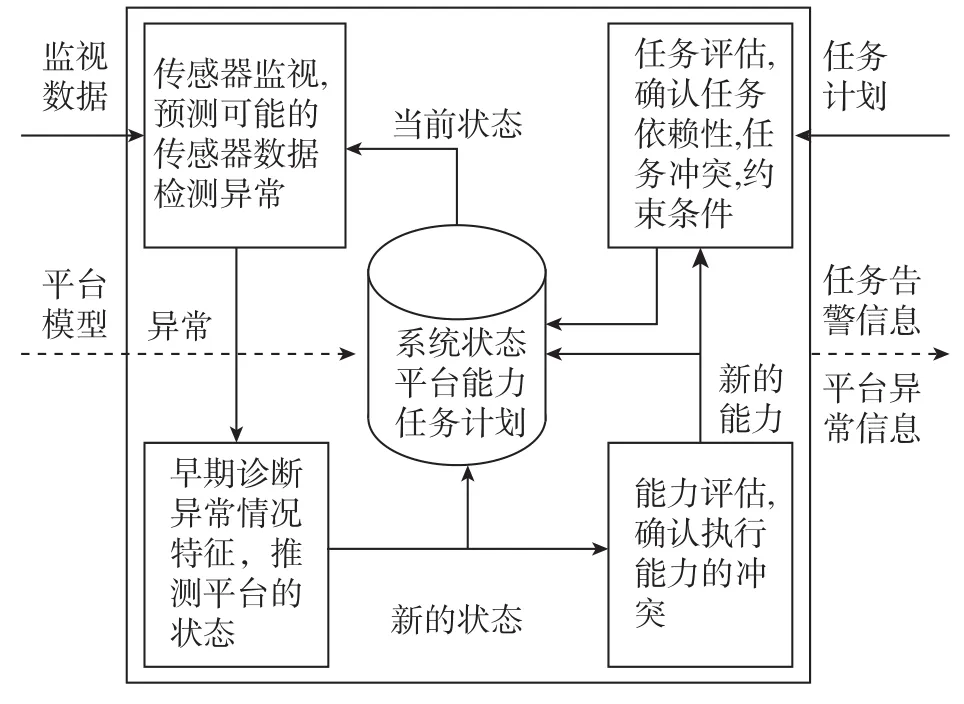
图3 任务执行评估的信息处理流程示意图Fig.3 The information processing flow chart of mission evaluation of perform
对于突发情况,任务执行评估可以及时处理,提供评估信息,操作员可以根据监视信息和评估意见进行进一步操作。
(3)任务推演评估模块技术方案
任务推演评估模块,在作战任务准备阶段,对规划结果进行可视化仿真,进行任务计划和攻击过程的可行性评估;在攻击过程完成后,对任务执行过程进行仿真重演,给出任务执行评估报告。任务推演实现飞行航迹和攻击过程的可行性评估,如图4所示。

图4 任务推演与评估模块的设计方案Fig.4 The design project of mission deduce and evaluation module
任务推演与评估模块通过数字地图和虚拟现实技术模拟显示多种比例尺无人直升机运行态势图,且能模拟出形象直观的三维地貌;既可描绘某一作战空间或局部地域,又可显示整个战场的广大地区;既可模拟显示地形情况,还可显示气候气象环境,从而提供与实际近似一致的作战空间。通过演示复杂的交战态势、电子对抗结果、战场信息搜集、传递与处理的过程,为操作人员和指挥员直观地判断无人直升机的任务效能提供一个生动、形象、逼真的环境。
①战场仿真可视化系统结构
战场仿真可视化软件的主要目标是为作战任务和飞行计划排演提供可视化环境,模拟和展示作战任务计划的预期动态效果,利用多源传感器信息重构动态作战场景,形成能够有效地辅助任务计划和决策管理的综合信息视图。
软件系统在设计上集成了地理信息系统、分布式交互仿真、并行处理、可视化等领域的先进技术,旨在建立基于低成本微机系统的满足实时性要求的战场仿真可视化环境。
战场仿真可视化软件采用分布式的体系结构,如图5所示。

图5 战场仿真可视化软件的组成结构示意图Fig.5 The software consisting of battlefield simulation visualization
本系统基于分布式交互仿真体系结构,采用分布式并行构架。采用分布式交互仿真协议(HLA)作为仿真应用模块的互连标准,具有良好的开放性、可扩展、可伸缩和可重用性。
从某种意义上讲,战场可视化子系统采用了三层体系结构,任务数据库为数据库服务器层、战场可视化引擎为客户层,而动态场景服务器为应用逻辑服务器层。采用三层体系结构的战场可视化子系统便于实行分布式并行处理,并且充分利用了数据库服务器、应用逻辑服务器以及可视化工作站各自的计算资源,使得在低成本计算机平台上实现飞行任务的可视化和大范围、高精度、动态战场环境的可视化成为可能。
②实时动态场景生成
本系统提出了实时动态场景生成的概念。与一般的专业可视化软件不同,这里并没有采用所谓的场景模型预生成手段,因为目前的作战场景是大范围、高精度、多实体、动态的,“预生成”在通过空间换时间的同时产生巨大的信息膨胀,从而对硬件平台提出极高的要求。
动态场景生成的实时性需要通过多方面的技术加以保证,场景预测是其中的关键技术之一。对未来的场景序列得益于分布式交互仿真的航位推算技术。如前所述,动态场景服务器以分布式交互仿真应用的方式连接仿真环境,通过HLA标准技术获取各运动实体的状态,结合实体运动规律方面的知识就可能推算出运动实体未来的状态。依据预测信息以及从任务数据库获取的空间信息和其他模型素材,从而动态地建立战场可视化模型。
战场可视化引擎从分布式交互仿真环境接收运动实体的状态信息以及战场环境的各种情报,以此驱动三维场景。一个有效的大范围动态场景可视化引擎必然面临场景调度和控制的问题。
虚拟战场模型的可视化是利用平台提供的渲染功能(如OpenGL)实现的,其中的工作不仅包括三维几何模型的渲染,还包括粒子系统特效、仿真对象的部件控制。分布式交互仿真环境提供的关于仿真对象(如各种武器单元)的运动状态是整体上的,并未给出其中的运动部件的实际状态。场景渲染过程中需要计算仿真对象三维模型部件的姿态。
③基本系统软硬件配置
基本型系统以在低成本微机平台上实现超低空无人直升机的飞行航迹可视化功能为目标。
主要功能模块由动态场景生成、飞行仿真软件、三维飞行浏览、近方空情图板、空间数据库、航路交互仿真模块构成,如图6所示。
3 V750 无人直升机任务规划系统建模及优化算法验证
无人直升机任务规划系统,在目前复杂多变的作战任务下,需要多无人直升机协同作战,因此多无人机的调配及任务规划成为一个热门问题,其建模及优化算法在国内外都进行了广泛研究。较为简单的,可以用线性规划、动态网络流的方式进行建模。
目前应用较为热门的模型,有带时间窗和容量约束的车辆路径问题模型(CVRPTW),其被广泛地应用于美军的 “全球鹰”无人机和 “捕食者”无人机的任务规划建模中。车辆路径问题考虑的是从一个或多个中心点出发,将货物送到指定的客户处,并回到中心点,其中客户的需求和位置随机。无人机的任务规划可以抽象类比为这样的简单车辆路径问题,为无人机的目标分配任务和规划路径。除此之外,给定一系列约束条件,如时间窗、容量约束、相容约束和优先约束等。为求解此类问题,可以采用遗传算法和模拟退火算法等。
国内的有多无人飞行器(Unmanned Combat Aerial Vehicle,UCAV)协同任务分配模型,该模型的目标是使整个作战单元中的无人直升机的整体作战绩效最优化,而评价绩效最优化的性能指标主要包括,作战目标区的任务达成状况、作战单元内无人直升机的损耗状况及完成作战任务所需的时间状况等。这样建立的模型较为复杂,需要转化为较少约束的模型,降低求解规模。为求解此类问题,国内科研院所进行了大量研究,具有代表性的有遗传算法、蚁群算法、基于整数规划的优化搜索算法、基于合同网的时序任务分配算法、粒子群优化算法等。
V750无人直升机系统是我国起飞重量和任务载荷能力最大的中型无人直升机系统,其采用具有FAA适航认证的成熟直升机平台,加装先进的飞行自动控制系统、数据链系统和适用的任务载荷系统。
V750无人直升机飞行控制与管理系统采用双余度配置,通过完善的自监控措施提高安全性和任务可靠性;飞控计算机采用串行背板总线技术,实现信息共享,如图7和图8所示。该系统用于稳定无人直升机的姿态、速度、高度和航迹,完成从起飞到着陆飞行全过程中的导航、制导、任务载荷系统控制、信息传输与存储的控制管理,并实现对发动机、电气设备及任务设备的监控与管理。系统支持外控、混控和程控三种模式,可以实现操作手人工控制以及执行设定程序的自动控制。由于该系统地面检测和维护系统功能完备,可以大大减少维护时间。

图6 超低空无人直升机的飞行可视化系统组成Fig.6 The flight visualization system consisting of lowest-altitude flying
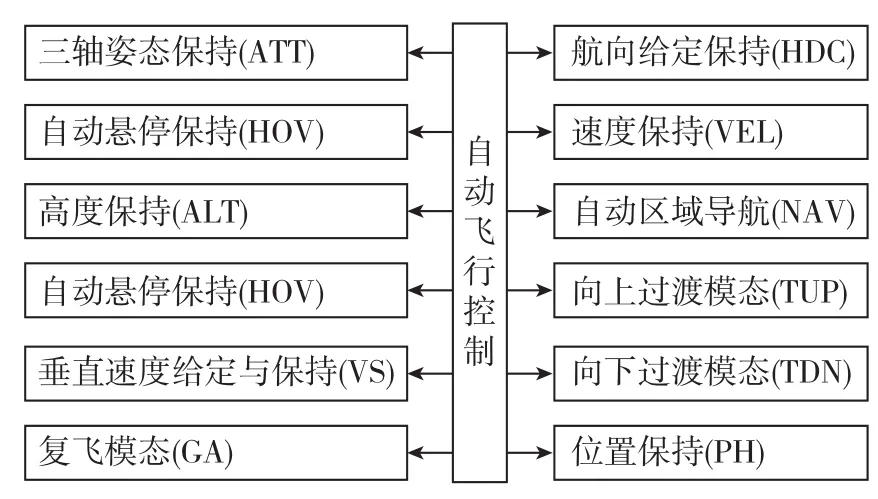
图7 V750无人直升机飞行控制系统Fig.7 The flight control system in pilotless helicopter of V750 type
V750无人直升机采用抗干扰ST-410系列测控通信系统,该系统由地面控制站、视距测控数据链组成。其中,视距测控数据链包括地面数据终端和机载数据终端两部分。主、备测控通道的频段分别为L、U/V频段,可适应出口地区无线电管理规定。该系统具有对无人机进行任务规划与指挥控制、飞行状态和机载设备工作状态实施遥控、飞行航迹和遥测参数进行综合处理显示和记录、自动跟踪定位的能力。该系统还具有多任务载荷自适应接入能力,可以对无人机载荷数据或图像进行实时传输、处理、显示、记录及回放。ST-410系列测控通信系统还包括C频段、相控阵L频段(一站多机)、中继型产品,也可以按用户需求定制测控通信系统。
V750无人直升机系统实现了搭载包括光电吊舱、合成孔径雷达(SAR)、三维激光扫描雷达、数字航测仪、磁力探测仪、航空Y光谱仪、探照灯和高音喇叭在内的多款任务设备,已广泛应用于海洋监测监管、地理信息测绘、边防巡逻、地矿资源探测、石油管道巡查、电力巡线及线路规划、灾害监控与评估、森林防护、核泄漏监测等领域。具体应用成果如下:
1)2012年12月,V750无人直升机系统搭载光电吊舱在莱州湾完成了安全飞行和图像捕捉、摄录、回传、显示等海上应用任务。
2)2013年2月,V750无人直升机系统搭载三维激光雷达在河南信阳圆满完成超高压电力巡线飞行。
3)2013年4月,V750-SW型高精度航摄无人直升机系统通过了国家测绘地理信息局组织的专家评审,实现了国内首例中型无人直升机1∶500高精度航空摄影作业。
4)2013年4月,V750无人直升机系统搭载可见光/红外光电吊舱、探照灯及高音喇叭在济南梨枣峪灾害现场完成空中监控的演练飞行。
5)2013年6月,V750无人直升机系统搭载磁力探测仪,在莱州湾对海岸进行磁力探测。这在国内也属首例。
6)2013年7月,V750无人直升机系统搭载机载监视与成像雷达,在莱州湾完成海面船舶监视,对目标快速搜索、定位、跟踪,实现大幅宽的高分辨率测绘成像功能。

图8 V750无人直升机机动轨迹控制Fig.8 The motorized control trace in pilotless helicopter of V750 type
4 结论
无人直升机任务规划系统是根据无人直升机数量、所完成的任务及任务载荷的不同,依据任务分配、数据链、战场电磁、气象环境以及战区地图资料、敌方防空系统部署情况等,通过建模及航路规划技术为无人直升机规划出安全系数最大、作战效能最高的飞行航线。本文着重阐述了无人直升机任务规划系统的基本功能,并具体描述了由任务规划站(内核)、规划算法组件、任务推演评估子系统以及多个无直升人机控制台组成的任务规划系统结构、技术方案及实现方法,且其建模技术及其优化算法在V750无人直升机中得到应用,通过对目标进行图像捕捉、快速搜索、定位、跟踪、摄录、回传、显示、空中监控、磁力探测等实验,显示应用效果较好。
[1] 高晓静,智勇,陈晓峰.无人直升机任务规划系统体系设计[J].计算机系统应用,2009,22(10):15-18. GAO Xiao-jing,ZHI Yong,CHEN Xiao-feng.Mission planning system architecture design for UAV[J].Computer System Apply,2009,22(10):15-18.
[2] 戴定川,盛怀洁,赵域.无人机任务规划系统需求分析[J].飞航导弹,2011,15(3):21-24. DAI Ding-chuan,SHENG Huai-jie,ZHAO Yu.The need analysis of UAV mission planning system[J].Flight Aviation Missile,2011,15(3):21-24.
[3] 胡中华,赵敏.无人机任务规划系统研究及发展[J].航天电子对抗,2009,25(4):49-54. HU Zhong-hua,ZHAO Min.Research and development of UAV mission planning system[J].Aerospace Electronic Warfare,2009,25(4):49-54.
[4] 宋子善,沈为群.无人直升机综合飞行控制系统设计[J].北京航空航天大学学报,1999,25(3):280-283. SONG Zi-shan,SHEN Wei-qun.Design of the control-simulation integration flight control system of remote controlautonomy control type pilotless helicopter[J].Journal of Beijing University of Aeronautics&Astronautics,1999,25(3):280-283.
[5] 魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2009.WEI Rui-xuan,LI Xue-ren.The UAV system and its applicationforbattle[M].Beijing:NationalDefense Industry Press,2009.
[6] 丁明跃,郑昌文,周成平,等.无人飞行器航迹规划[M].北京:电子工业出版社,2009. DING Ming-yue,ZHENG Chang-wen,ZHOU Cheng-ping,et al.The flight route planning of UAV[M].Beijing:Electronic Industry Press,2009.
[7] 孙滨生.无人机任务系统有效载荷技术现状与发展趋势研究[J].光电与控制,2010,21(12):35-37. SUN Bin-sheng.The research of effective load technology situationanddevelopmenttrendsforUAVmission planning system[J].Photoelectric and Control,2010,21 (12):35-37.
Research and Practice on Mission Planning System of Pilotless Helicopter
CHEN Chang-hao1,CHEN Xue-jiang2,HU Xiao-ping1,ZHENG Li-yan3
(1.College of Mechatronics Engineering and Automation,National University of Defense Technology,Changsha 410073;2.Department of Avionics and Arms Engineering,Army Aviation Institute,Beijing 101123;3.Weifang Tianxiang Aviation Industry Limited Liability Company,Weifang 261000)
It is very important for mission planning system of pilotless helicopter which finishes with extra long distance reconnaissance,monitoring ability and fight.The organization and function module for mission planning system of pilotless helicopter were analysed,the modeling technique and its optimize algonthm were researched,they were tested and verified in pilotless helicopter of V750 type.
manless driving;helicopters;mission planning system;flight control;autonomous control
TN966
A
1674-5558(2016)01-01123
10.3969/j.issn.1674-5558.2016.03.001
2015-05-21
陈昶昊,男,硕士,控制科学与工程专业,研究方向为导航技术。
