样本块匹配光栅投影阶梯标定方法
2016-09-20丁一飞王永红黄安琪但西佐
丁一飞,王永红,胡 悦,黄安琪,但西佐
(合肥工业大学仪器科学与光电工程学院,安徽 合肥 230009)
样本块匹配光栅投影阶梯标定方法
丁一飞,王永红,胡悦,黄安琪,但西佐
(合肥工业大学仪器科学与光电工程学院,安徽合肥 230009)
针对直接三角法为模型的光栅投影测量技术标定过程需要前后移动参考平板以获取标定平面的方法,提出一种改进的阶梯标定方法。该方法使用一个固定阶梯面作为标定板,将数字光栅投影到阶梯面后,再通过图像延拓的方法获得不同位置的参考平面条纹图,以获取标定平面,无需移动标定板即可实现标定过程,简化标定步骤和标定系统。实验结果表明:使用样本块匹配方法延拓获得的光栅条纹图边界衔接效果很好,视场均匀,延拓效果好;使用阶梯标定方法进行实际测量并获得三维结果,证明其实用可行。采用该方法克服传统标定方法需要移动参考平面的局限性,简化系统标定步骤,无需标定板移动装置,减少标定采集图像数量,扩大适用范围。
光栅投影;系统标定;样本块匹配;阶梯标定
0 引言
光栅投影三维形貌测量系统是通过采集物体的二维图像信息,在二维信息的基础之上建立相应物体的三维形貌[1-3]。三维形貌的准确性是以规范和精确的二维图像信息为基础的。因此,规范计算机视觉测量系统参数是其非常重要的一个步骤,在大多数情况下,这些参数必须通过实验和计算才能得到,这个过程称为系统标定。
近年来,光栅投影系统的标定方法取得了很大的进步,许多学者提出了一系列不同的系统模型和标定方法。当前最常用的标定方法是传统的摄像机标定方法[4],利用几何信息已知的标定模板作为空间参照物,通过已知数据建立摄像机图像像素位置和空间物点之间的关系。XU等[5]针对每一个投影仪与相机的像素对应关系分别标定参量,避免了镜头畸变带来的误差,提高了测量准确度;XU和DOUET等[6]提出一种基于圆球的多项式拟合方法,在标定准确度标定效率方面均有提高;肖丹等[7]结合相位高度映射关系与棋盘标定方法,重构三维信息,获得了较高准确度;王鹏等[8]提出基于成像光线空间追踪的摄像机标定方法,建立了成像点与空间直线之间的光线追踪模型,在噪声抑制方面取得了提高;叶峰等[9]重新研究了模型求解方法,对摄像机的非线性畸变做了进一步校正。
然而,在采用直接三角法模型时,传统的标定方法[10-11]仍然需要移动一次或几次参考平板来完成标定文件的获取。在许多在线测量环境下,测量位置难以安放移动装置来移动标定平板(比如高温环境,或者狭窄空间)。本文针对传统的基于直接三角法模型的标定方法进行改进,采用基于样本块匹配的阶梯标定方法,无需标定板移动装置,简化了标定步骤和系统,扩大适用范围。
1 直接三角法系统模型及标定方法
使用计算机生成的数字光栅光强分布如下式:

式中:a——条纹背景;
b——与对比度有关的变量,b/a是条纹图的对比度;
P——条纹栅距;
x——水平轴坐标;
y——竖直轴坐标。

图1 直接三角法系统模型示意图
由图1可知,在被测物曲面高度较小时,可认为待测表面高度Δz和可测得的图像形变Δb具有一定的线性关系,其中Δb为放置物体前后光线在CCD上移动的距离;M是摄像机的放大倍数,θ是照明角,k=Msinθ是灵敏度因子,它可以由实验标定得到。
1.1高度矩阵的求取
在此关系模型中,求取高度矩阵的过程即是求解Δz的过程。摄像机放大倍数为

以上两个公式联立,可得:

因此,测量出Δb以及灵敏度因子k即可求解Δz。条纹投射至物体上后,由于条纹图中有形变,条纹图的光强分布变为

其中Δx是形变量,等价于k·Δz。令φ3d=[(2π/P)(x-kΔz)],这样式(3)变为

其中,φ3d为物体相位,由于φplane和 φ3d均可由4步相移法测得,联立式(1)~式(4),相减可以得到一个表面形态ΔZ和相位φplane、φ3d的关系式:

或者表示为

利用相移法可以得出φ3d和φplane,上式中的K由实验标定得到,进而计算出ΔZ。配合标定步骤计算出K值即可完成基于图1的高度矩阵求取过程。
1.2改进的阶梯标定方法
在实验标定过程中,K定义了相位改变和表面高度变化之间的关系,可以利用一个参考平面来计算K值。传统的标定方法是将参考平板安装在可以沿Z方向上准确直线移动的载物台上进行标定,移动一个Δh的距离后,在末端位置即为参考平面。由此,可获得标定文件。
由上述过程可以看出,该标定方法需要将参考平板安装在可以沿Z方向上精确直线移动的载物台上进行。然而在很多在线测量过程中,很难安装标定板移动装置来移动标定板(如高温环境,或者狭窄空间等),这一问题限制了光栅投影测量系统的适用范围。针对这一局限性,本文提出了一种新的阶梯标定方法。
如图2所示,使用一个高度差已知的阶梯面来代替传统的参考平面,将生成的数字光栅投影到该阶梯面,在阶梯的上下A、B面形成错位的投影条纹。A、B两个面都只有部分的光栅投影条纹信息,如果想要得到完整覆盖整个标定平面的标定文件,需要通过一定的方法对A、B面现有的光栅投影条纹进行延拓,直至整个参考平面的大小。这样实现了使用一副阶梯条纹图,而同时获得了两个参考平面上的相位分布。假设由上半部位置延拓得到的参考面上的相位分布表示为φtop;由下半部位置得到的参考平面上的相位分布为φbottom。因为阶梯高度Δh已知,灵敏度因子K可以由下式算出:

联立式(6)则有:

或表示为

式中:φobject=φ3d——物体相位;
Δφobject(x,y)——放置物体前后物面的相位差;
Δφplane(x,y)——标定时由上下两部分分别延拓得到的参考平面相位差;
Δh——阶梯高度,可根据实验要求选用不同高度的阶梯。

图2 阶梯标定流程图
2 基于样本块匹配的光栅条纹延拓方法
在实际的光栅投影测量标定过程中,采集到的是一幅投影在阶梯上下表面的光栅条纹图,在上下面中分别截取A、B两个区域,再将A、B区域分别延拓至整个参考平面的大小。
这种情况下,采用样本块匹配的图像修描方法[12-13]根据光栅投影图的条纹特征来对其进行延拓。其核心思想[14]是利用图像的可信度值和等照度线对图像进行样本匹配。对一幅原始图像I,如图3所示,待填充的目标区域用Ω表示,它的边缘用δΩ表示,已知像素区域称为源区域,用Φ表示,则I=Ω+Φ。边缘δΩ上的每一个像素点p都对应一个以这个像素点为中心的待填充的窗口区域ψp,这个窗口区域包含了部分的源区域和部分的目标区域,它的尺寸应该大于图像中最大的纹理单元。在对图像的空白区域进行修延拓之前,需要输入两个参量,第1个是需要延拓的目标区域Ω的边缘δΩ,第2个是待填充的窗口模板ψp的大小。选择不同的窗口模板大小对多幅光栅条纹图进行延拓处理的实验,实验结果表明当窗口模板大小设置为7×7时可以获得较好的延拓效果。在确定了参量后,块填充就由算法自动完成,主要分为3个步骤:
1)计算修复块的优先权

图3 原始图像
图像中的每个像素,除了待修补的区域外,都有各自的置信度(confidence),修补的区块则根据包含的像素有不同的优先权(priority)。修补区域的优先权决定了以后的修补优先顺序,优先权越高,越先处理修补区域。在计算优先权大小时,应考虑几个因素:①区域比例的影响,即修补区域内像素的置信度大小;②结构信息的影响,即待修补区包含的线性结构信息能否与周围形成一个连续的线性结构,是否闭合。算法分别使用了置信度项C(p)和数据项D(p)来表示这2个因素。分别定义如下:

式中:np——待修复区域Ω的边界δΩ在点p处的法向量;
▽Ip——已知区域Φ的边界的梯度向量的垂直向量;
α——标准化因子(灰度图像取α=255)。
∀p∈Ω,C(p)=0;∀p∈I-Ω,C(p)=1。
最后,取:

2)对待修补区域进行纹理和结构的延拓
当目标区域边界上所有待修复块的优先级都计算完成后,寻找具有最大优先权的待修复块ψ。假设ψ是源区域中与ψ最匹配的块(一般情况下,ψ整块都应包含在已知区域Φ中),匹配度公式如下:

3)更新已延拓区域的置信度
目标块填充完成后,原来块中的边界点变成已知点,这时需重新计算已知点的置信度,以及边界点的优先权。对于新加入到修补区域块内的像素,在此都将它们设为与p点位置的像素有相同的置信度,如下式所示:

置信度更新过后,一次延拓过程结束。这时,目标区域和源区域发生了变化,随之带来边缘也发生了改变。重复以上3个步骤进行新一轮的过程,直到整个目标区域延拓完毕。图5是一个将圆形的条纹区域延拓至整个图片的范围的应用实例。可以看到,本算法很好地利用了干涉图的纹理特征,有效地合成条纹图的纹理信息,延拓后的图像边界衔接较好,视场较均匀,条纹模式以及灰度等级一致,延拓效果很好。算法流程图如图6所示。

图4 样本块填充

图5 延拓算法实例

图6 延拓算法流程图
3 实验与分析
为了验证本文所述的基于样本块匹配的阶梯标定方法,组建了测量实验系统,被测物是一个形貌特征明显的玩具脸谱,如图7所示。

图7 测量系统与被测物
组建完实验系统后,分别使用传统的移动参考平板的方法和基于样本块匹配的标定方法来进行系统标定。图8是采用本文标定方法所需要的阶梯条纹图,阶梯高度2.5mm;图9是通过使用基于样本块匹配的图像修描算法由图8上下表面分别延拓得到的两幅条纹图;图10所示是采用原始标定方法获得的两幅标定条纹图,图10(a)是初始位置的光栅条纹,相当于图8中阶梯的上半部分,图10(b)是移动2.5mm后的光栅条纹,相当于图8中阶梯的下半部分。
在传统的标定方法中,获取标定文件共需要在初始位置、末端位置各采集4幅分别带有90°相位差的条纹图,获得其包裹相位图,如图11所示。而采用本文标定方法后,只需要采集4副阶梯条纹图,通过对其上下表面进行延拓处理,即可获得需要的包裹相位图,如图12所示。可以看到,在传统的包裹相位图中由于其两侧区域超出了参考平板的范围,所以没有采集到有效的条纹信息;而在延拓包裹相位图中,由于可以自由选择需要延拓的区域,从而使无效的两侧区域也得到了充分利用。然后通过软件计算获得标定文件,至此系统标定过程结束。

图8 阶梯条纹

图9 延拓条纹图

图10 原始条纹图
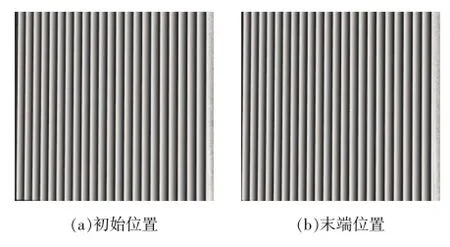
图11 传统包裹相位图
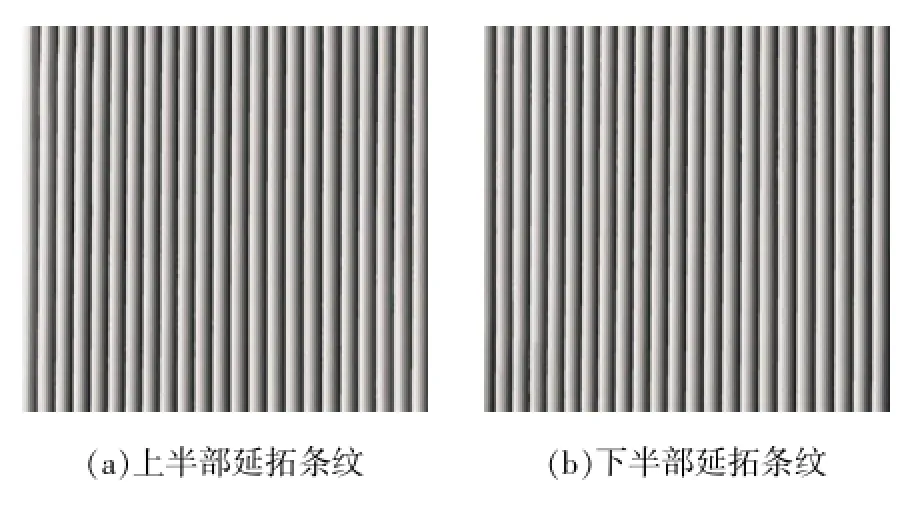
图12 延拓包裹相位图
然后使用阶梯标定方法获得的标定文件对被测物进行测量。结果如图13所示。
图13(a)是利用四步相移法获得的包含被测物相位信息变化的条纹图,图13(b)是对其进行滤波[15]、解包裹后得到物体真实相位图,其中红线位置是所取截面曲线的位置。最后将所获得的相位图、标定数据进行解算得,进行三维重构的结果如图14所示。

图13 物体相位图

图14 三维显示
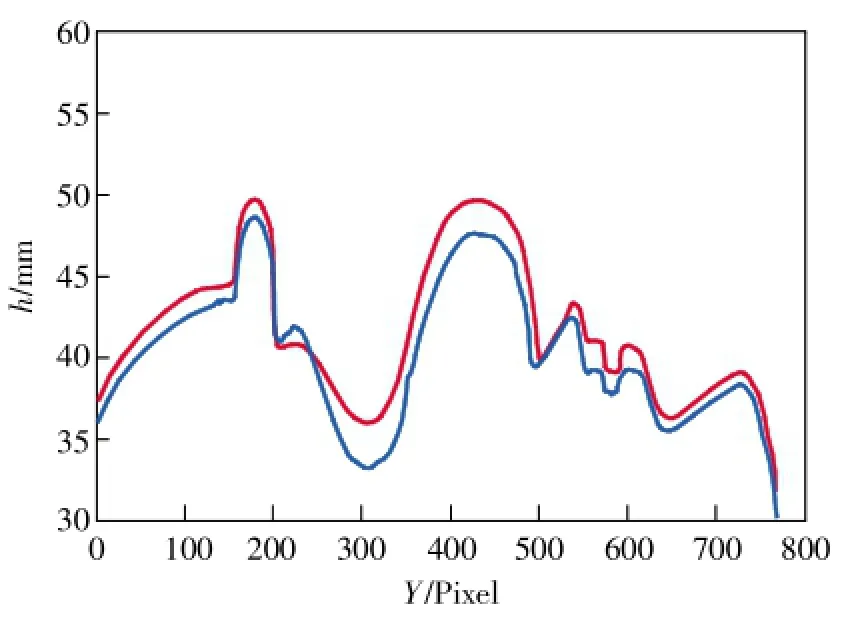
图15 截面曲线对比
为对标定测量方法进行比对,分别采用传统标定方法和阶梯标定方法进行了三维轮廓测量,在物体相位图中取相同位置的高度信息对比,如图15所示。其中红色曲线表示传统方法测量获取的三维轮廓截面曲线,蓝色曲线表示改进后的阶梯标定方法的同一截面曲线,可以看到,两条轮廓截面曲线基本吻合。使用Matlab计算其相关指数为0.9744,说明其曲线拟合程度很好,与传统标定方法相比测量结果差距很小,验证了阶梯标定方法的可行性。
4 结束语
本文针对采用直接三角法模型时传统的标定方法需要移动参考平板的问题进行了改进,并采用基于样本块匹配的图像修描算法来实现光栅条纹图的延拓,从而完成标定文件的获取。方法无需移动标定板即可实现标定过程,同时减少了需要采集的标定图像数量,简化了标定步骤,扩大了该技术的适用范围。
[1]尚忠义,李伟仙,董明利,等.基于四步相移光栅投影的三维形貌测量系统[J].应用光学,2015(4):584-589.
[2]马勇平.光栅投影相位测量轮廓术在SMT锡膏三维检测中的应用研究[J].电子质量,2015(6):1-4.
[3]王选泽,吴雅君,何涛.一种从粗到精逐步细化的变尺度光栅投影测量方法[J].应用光学,2015(5):774-777.
[4]刘顺涛,骆华芬,陈雪梅,等.结构光测量系统的标定方法综述[J].激光技术,2015(2):252-258.
[5]XU J,XI N,ZHANG C,et al.Real-time 3-D shape inspectionsystemofautomotivepartsbasedon structured light pattern[J].Optics&Laser Technology,2011,43(1):1-8.
[6]XU J,DOUET J,ZHAO J G,et al.A simple calibration methodforstructuredlight-based3-Dprofile measurement[J].Optics&Laser Technology,2013,48(5):187-193.
[7]肖丹,陈良洲,干江红.基于数字光栅相移法的三维重构[J].光电技术应用,2011,26(5):17-20.
[8]王鹏,张求知,李文强,等.基于成像光线空间追踪的摄像机标定方法研究[J].仪器仪表学报,2015(1):224-229.
[9]叶峰,王敏,陈剑东,等.共面点的摄像机非线性畸变校正[J].光学精密工程,2015,23(10):2962-2970.
[10]安东,陈李,丁一飞,等.光栅投影相位法系统模型及标定方法[J].中国光学,2015(2):248-254.
[11]SU X Y,SONG W Z,CAO Y P,et al.Both phaseheight mapping and coordinate calibration simultaneously in PMP[C]∥Proceedings of the International Society for Optical Engineering,19th Congress of the International Commissing for Optics:Optics for the Quality of Life. Firenze:SPIE Press,2003:847-875.
[12]黄菁,朱日宏,陈磊.基于样本块匹配的干涉图延拓方法[J].光学学报,2007(7):1217-1223.
[13]周美丽,白宗文.基于样本块的图像修补系统设计[J].电子测量技术,2015,38(8):73-75.
[14]CRIMINISIA,PÉREZ P,TOYAMA K.Region filling and object removal by exemplar-based image inpainting[J]. IEEE Transactions on Image Processing,2004,13(9):1200-1212.
[15]王永红,李骏睿,孙建飞,等.散斑干涉相位条纹图的频域滤波处理[J].中国光学,2014,7(3):389-395.
(编辑:李刚)
Step calibration method of grating projection based on exemplar matching
DING Yifei,WANG Yonghong,HU Yue,HUANG Anqi,DAN Xizuo
(School of Instrument Science and Opto-electronics Engineering,Hefei University of Technology,Hefei 230009,China)
In grating projection profilometry based on direct triangulation model,the calibration process needs to move reference plate back and forth to obtain calibration planes.To solve the problem,this paper proposes an improved step calibration method.The method uses a fixed step surface as calibration target,when the digital grating projected to the step surface,reference planefringeindifferentpositionswasobtainedbyextendedimagemethod,andthenthe calibration planes were also obtained.Now the calibration process can be achieved without moving thereferenceplate,thecalibrationprocedureandcalibrationsystemaresimplifiedtoo. Experimental results show that the grating fringe images obtained via exemplar matching method,have a good result of boundary convergence continuation of grating image,uniform field of view,the fringe pattern and gray level were consistent.Use the step calibration method for actual measurement and get the object three-dimensional morphology.It is proved that this method is accurate and reliable.This method overcomes the limitations of the traditional calibration method that we need move reference plate,simplifies the system calibration procedures,dispenses with calibration plate mobile device,reduces the number of collected images,expand its scope of application.
grating projection;system calibration;exemplar matching;step calibration
A
1674-5124(2016)08-0007-06
10.11857/j.issn.1674-5124.2016.08.002
2016-02-17;
2016-03-21
国家自然科学基金项目(51375136);中航工业产学研专项(CXY2013HFGD22)
丁一飞(1990-),男,安徽庐江县人,硕士研究生,专业方向为仪器仪表工程。
