基于ADAMS的新型机械手优化设计
2016-09-19张孝明刘树华方东旭山西中北大学中国兵器工业第二零八研究所
张孝明刘树华方东旭、山西中北大学 、中国兵器工业第二零八研究所
基于ADAMS的新型机械手优化设计
张孝明1刘树华1方东旭2
1、山西中北大学2、中国兵器工业第二零八研究所
本文为货物平台设计一种机械手来完成对货物的抓取搬运,并对该机械手进行了优化设计。通过三维建模和ADAMS软件对其机构进行动力学仿真分析计算,得到机械手抓取货物过程的运动规律和曲线,对其中的关键部分进行了参数化分析,对改进机构的设计具有重要参考价值。
机械手;优化设计;参数化分析;动力学仿真
优化设计是机械设计研发的热点,伴随着我国成为世界机械生产、加工和消费大国,对机械结构的使用要求也不断提高。科学技术在不断地发展创新,在同工业发达国家相竞争的过程中,就必须要有先进的工业效率,保证产品的包装输送效率,这个过程需要机械手的平稳运动。因此现代化机械手的设计与优化势在必行。ADAMS仿真技术可以提高机械手的研发速度,从而缩短开发周期。
1 机械手的模型建立与工作原理
使用UG三维建模软件对新型机械手进行建模如图1所示。

图1 新型机械手结构简图与三维模型
新型机械手通过电机驱动,电机连接轴丝杠可以上下移动。连杆由于销钉的固定,一端随着连接轴丝杠向上运动,另一端带动机械爪运动,机械爪在销钉的固定下会以销钉为中心进行旋转。当电机连接轴丝杠向上运动时,机械爪张开,放松货物,放松货物的过程由慢到快;反之,当电机连接轴丝杠向下运动时,对货物进行抓取,抓取速度由快到慢。整个运动过程可以保证货物的安全性。
机械手在抓取货物的过程中,与货物的接触力和接触速度大小,都对货物的无损伤有着至关重要的影响。基于此,我们使用ADAMS软件对机械手的运动过程进行动力学仿真,并对关键部位进行优化。
2 新型机械手运动仿真
2.1对机械手模型添加约束
根据机械手的实际工作情况,参照本机械手的工作原理,对机械手添加约束。对电机连接轴丝杠添加移动副,连杆与电机连接轴丝杠添加旋转副,机械爪与连杆之间添加旋转副,机械爪与机械爪上的两个销钉添加旋转副,机械爪上的销钉与保护壳体添加固定副。在电机连接轴丝杠上添加往复的驱动速度,按照机械手的实际工作情况对相关参数进行设置,建立合理的动力学模型如图2所示。

图2 机械手动力学模型
2.2确定机械手的设计变量
在参数化建模的过程中,我们首先确定参数化变量来对机械手的结构模型进行优化。由于参数化的过程中,我们只需要保证所建立的模型与实物有着相同的质量和位置变化关系,不需要考虑模型形状的改变。因而,依据机械手抓取时间t≤4s,抓取力F≥428N,抓取的终了速度v1last≤20mm/s,可以等效计算出连接轴丝杠的运动速度v在17mm/s到28mm/s之间。由于连接轴丝杠的运动速度与抓取时间存在一定的运动关系,因而在仿真优化的过程中不对v进行额外处理。因此影响机械手抓取货物时稳定的关键因素有抓取时间t、货物的运动速度v1决定。变量的参数如表1所示。我们选择机械手与货物的夹紧力作为优化设计的优化目标。

变量 标准值 变化区间抓取时间 1.5 1~2抓取速度 15 5~20
3 仿真结果分析
基于ADAMS软件对机械手进行动力学优化仿真,充分考虑了主要设计参数对模型的影响。经过仿真计算,我们得到了抓取时间t与机械爪同货物夹紧力F的关系如图3所示。货物的抓取速度v1同夹紧力F的关系如图4所示。

图3 抓取时间t与机械爪同货物的夹紧力F的关系图
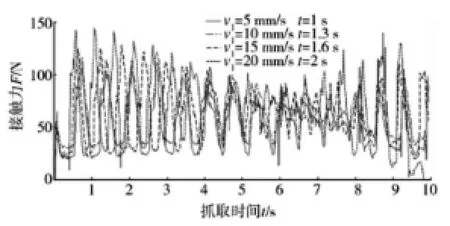
图4 货物的抓取速度与夹紧力的关系图
从图3中我们可以看出,机械爪与货物间的最小夹紧力Fmin随着时间t的增大而逐渐减小;最大夹紧力Fmax随着时间t先是增大再逐渐减小,最后又略有增大。由此可以说明,在抓取货物的过程中,抓取时间越长,反复振动的频率就会越高,机构的平稳性也就会逐渐变差。从图中可以看出,最佳的抓取时间t是1.2~1.8s。
从图4中我们可以看出,货物的夹取速度对新型机械爪的抓取平稳性和可靠性具有重要的影响。机械爪与货物间的最小夹紧力Fmin随着抓取货物的速度v1的增大呈现先增大后减小的趋势;最大夹紧力Fmax随着抓取货物的速度v1的增大而增大。由仿真结果,我们发现在保证夹取物品稳定性的前提下,抓取货物的最佳速度v1为10~15mm/s。由此可见,抓取速度并非越小越好,控制抓取速度在一定的范围内,是保证机械手抓取货物保持稳定的重要前提。
4 结语
(1)基于ADAMS软件对新型机械手进行了仿真分析和优化设计,得到了抓取时间同夹紧力的变化规律及抓取速度同夹紧力的变化规律,直观清晰。最终得到了最佳的抓取时间t是1.2~1.8s,最佳速度v1为10~15mm/s。将影响机械手抓取货物平稳性的影响因素控制在合理的范围内,可以极大地保证机械手工作的可靠性,提高机械手的工作效率。
(2)通过ADAMS动力学仿真软件对复杂模型机械手进行了动力学仿真分析,避免了数学模型推导计算的复杂烦琐的过程,极大的缩短了产品的研发周期,对产品的设计具有重要的意义。
[1]徐立峰,张雷.基于ADAMS的模切机双肘杆机构优化设计研究[J].包装工程,2013,30(1):75—78.
[2]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
[3]刘杰,郭燕伶,朱江江.一种滑动锁紧装置的创新设计与数控加工方法[J].制造业自动化,2012(12):120-123.
[4]郭卫东.虚拟样机技术与ADAMS应用实例教程[K].北京:北京航空航天大学出版社,2008.
[5]宁龙,吴玉光.基于ADAMS的夹具定位误差分析方法[J].制造业自动化,2012(1):86-89.
张孝明,1990出生,辽宁省庄河人,硕士研究生,研究方向:结构设计与仿真。
