MATLAB在自动控制原理课程教学中的应用*
2016-09-18牛慧芳孟青臧俊斌
◆牛慧芳 孟青 臧俊斌
MATLAB在自动控制原理课程教学中的应用*
◆牛慧芳 孟青 臧俊斌
结合控制系统校正中串联超前校正这一知识点,将MATLAB软件仿真融入自动控制原理的理论教学。通过形象直观的仿真结果,将理论知识具体化、生动化,同时激发学生的学习兴趣,加深学生对理论知识的理解,提高课堂效率。
自动控制原理;MATLAB仿真;串联超前校正
10.3969/j.issn.1671-489X.2016.14.014
1 引言
自动控制原理是自动化、电气工程及其自动化等专业重要的专业必修基础课,课程的主要目的是使学生掌握自动控制系统的基本概念、分析及综合的方法,为后续专业课程的学习打下坚实的理论基础。
自动控制原理是一门知识丰富、重理论、较抽象的学科,学生要掌握这门课程需要多学科知识的积累,而大部分学生难以全面掌握相关学科知识,所以学好该课程有一定难度,主要表现在:学生对课程缺乏兴趣,不能够积极主动学习;理论知识较抽象,学习过程枯燥;学生分析和解决问题的能力还有待进一步提高;学习中对重要内容把握不准确,知识点易混淆[1]。
基于以上问题,本文将MATLAB与自动控制原理理论教学相结合,一方面在课堂上可直接验证理论知识的准确性,另一方面在活跃课堂气氛的同时锻炼学生的动手能力[2]。
2 自动控制原理课堂教学知识点举例
由王建辉等主编和清华大学出版社出版的《自动控制原理》(第二版)[3]第六章中“控制系统校正”是本章的教学难点。本文重点详细阐述基于频率法的串联超前校正内容,并结合MATLAB对该内容进行仿真,直观形象地验证其理论知识的正确性。控制系统校正的常规理论内容如下。
所谓系统校正:在原有系统(基本设计方案)的基础上,通过增加附加的环节(装置、元件、算法)改变系统结构及性能,目的是使系统达到预定的性能指标要求。校正是系统设计的关键性工作,是有针对性地对系统进行再设计的过程。
校正方法按校正环节(装置)的接入方式可分为串联校正、反馈校正(并联校正)和前馈校正(复合校正);按校正的设计方法分为基于根轨迹法的校正、基于频率响应法的校正;按校正环节的相位特性可划分为超前校正、滞后校正、滞后—超前校正、PID校正。
频率法校正的特点是以伯德图分析为基础的。用频率法校正控制系统,主要是改变频率特性形状,使之具有合适的低频、中频特性,保证稳定裕量,得到符合要求的闭环控制品质[4]。需要校正的几种基本类型如图1所示。其中,(a)调整低频增益——满足稳态误差要求;(b)改善中频段特性——提高稳定裕度、改善动态特性;(c)兼有前两种补偿。串联超前校正的结构图如图2所示。
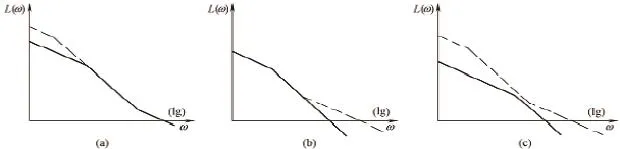
图1 校正的几种基本类型
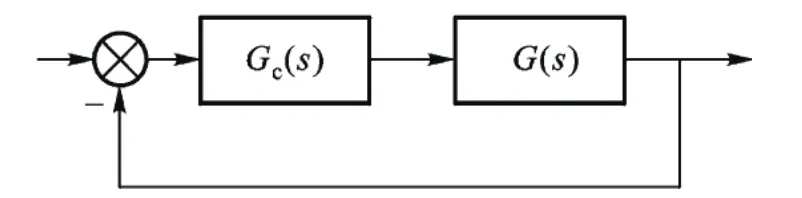
图2 串联校正的典型结构图
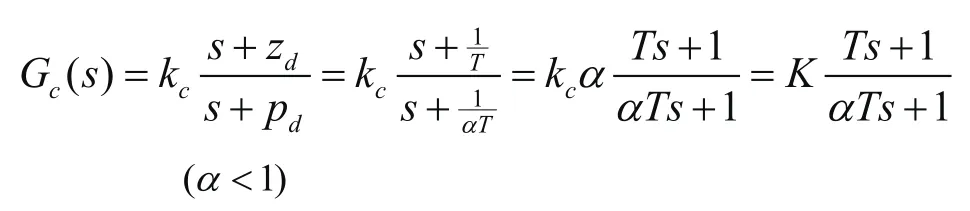
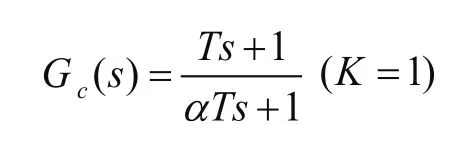
串联超前校正环节传递函数的一般形式:
超前校正环节的频率特性分析:
频率特性:
对数频率特性:
最大超前相位角(最大补偿角):
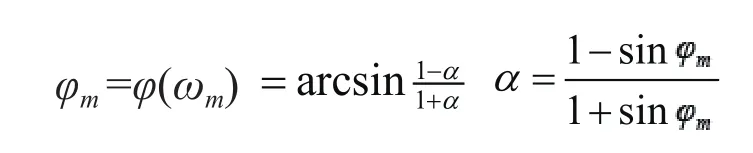
超前校正环节的Bode图如图3所示。
串联超前校正的设计原理:串联超前校正是利用超前校正网络的正相角来增加系统的相角裕量,同时改善系统的动态特性。因此,校正时应使校正环节的最大超前相角出现在原系统的穿越频率ωc附近(稍大于ωc)。
超前校正设计一般步骤如下。
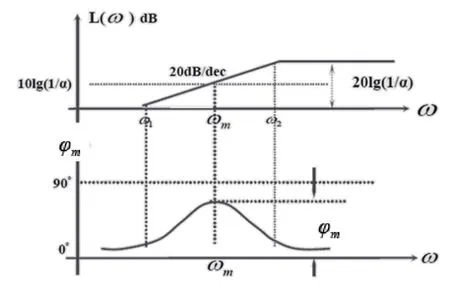
图3 超前校正环节Bode图
1)调整增益K值,根据要求的稳态性能指标,确定系统应具有的开环增益K。
2)按K值绘制原系统Bode图,并求出原系统的相角裕度γ0;确定校正前系统是否稳定,是否有稳定裕度。
3)根据指标要求的相角裕量γ计算所需要的补偿相角:超前校正网络提供的超前相位角φm值应为多大?
由于γ=γ0+φm,γ0=γ(ωc)是校正前的相位裕度,取值依据:φm>γ-γ(ωc)。
考虑到校正后的新穿越频率大于原穿越频率ωc,补偿角要适当留有余量(5°~15°)。
近似关系:φm=γ-γ(ωc)+(5°~15°)
4)由超前校正环节产生的最大超前相角为φm,计算校正环节参数(衰减因数)α,即:
5)求校正后系统的新穿越频率ωc,依据ωc′=ωm。
6)由ωm确定校正环节的转折频率:
超前校正装置的传递函数为:
理论知识分析如下。

令γ(ωc)=180°+φ(ωc)=180°-90°-arctgωc,得:

不满足指标要求。
原系统Bode图如图4所示。
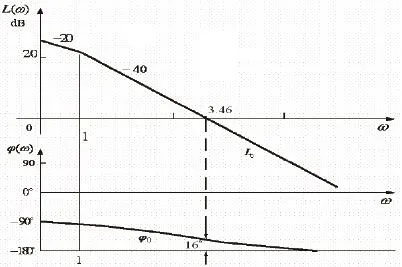
图4 原系统Bode图
3)计算补偿角。引入超前校正环节,计算校正环节产生的超前相角:

4)确定衰减因数:
5)设校正后系统的穿越频率为ωc=ωm,ωm处补偿的增益应为:
令原系统在ωm处增益为:

6)校正环节的转折频率为:
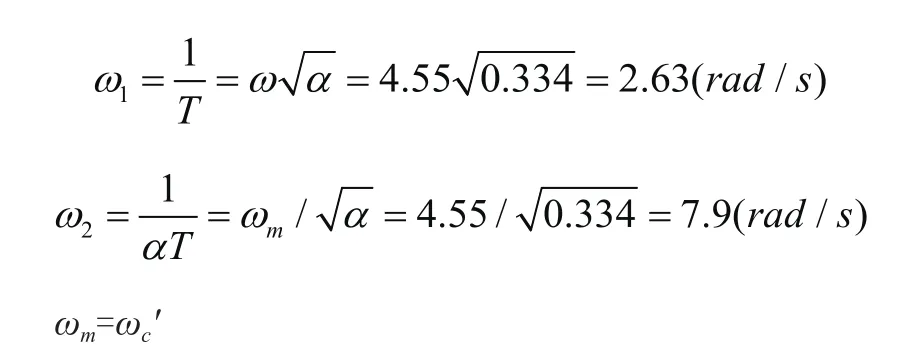
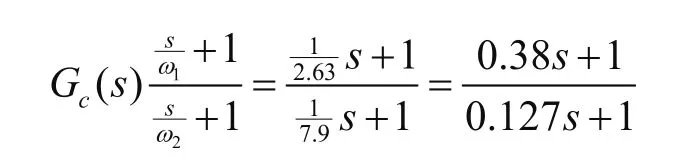
校正环节的传递函数为:
7)校正后系统的开环传递函数为:

校正后系统的相角裕量γ为:

此校正系统满足了希望的性能指标要求。校正后系统Bode图如图5所示。
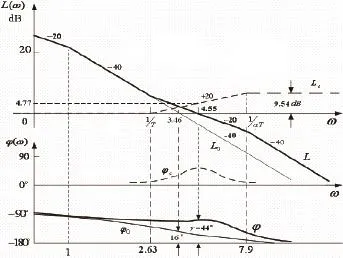
图5 校正系统Bode图
以上是对该题目按照串联超前校正的理论内容进行分析,但是计算量比较大,计算过程也较为复杂,学生对该部分内容缺乏兴趣,积极性不高。在此将MATLAB仿真引入该部分内容教学,通过编写程序来验证串联超前校正理论知识的正确性,其形象、直观,更能吸引学生的兴趣,调动学生的积极性。
3 MATLAB在串联超前校正中的应用
以上题目通过MATLAB仿真的程序部分如下:
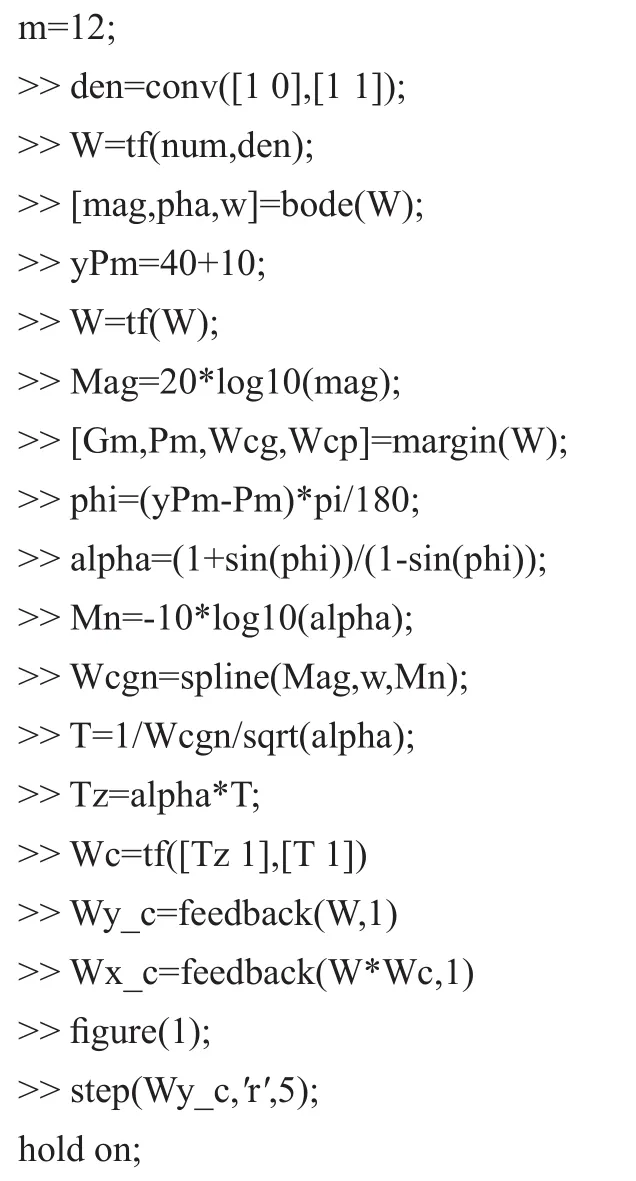
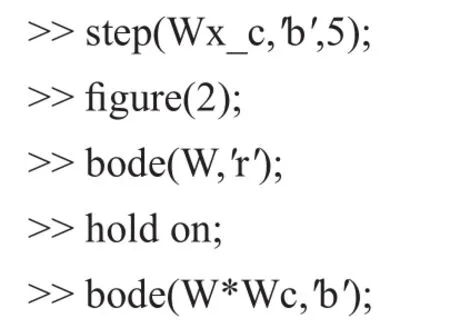
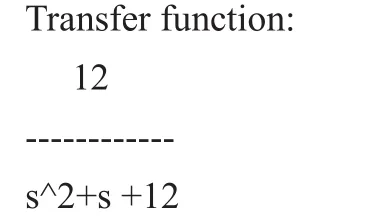
校正前系统闭环传递函数:
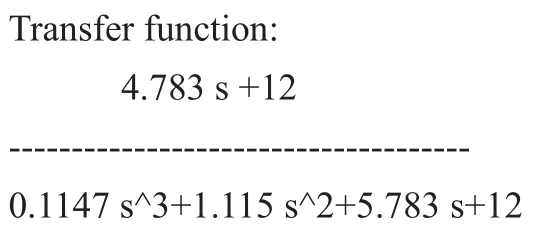
校正后系统闭环传递函数:
运行结果如图6、图7所示。
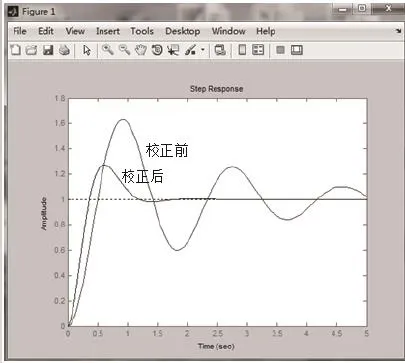
图6 校正前后闭环系统的单位阶跃响应曲线
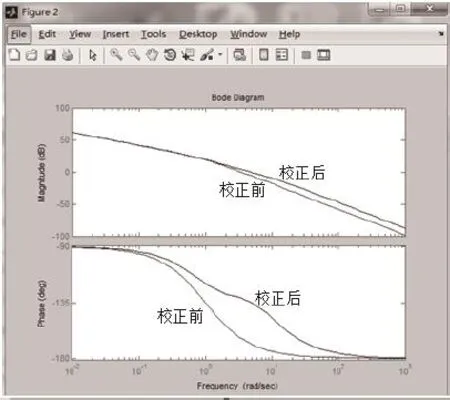
图7 校正前后系统的Bode图
根据MATLAB仿真结果不难发现,仿真得到的校正环节传递函数、校正后系统的闭环传递函数与理论分析得到的结构完全一致。由此可见,将MATLAB仿真和自动控制原理的理论知识相结合进行讲授,既形象直观地验证了理论内容的准确性,又吸引了学生的学习兴趣,活跃了课堂气氛,同时加深了学生对所学理论知识的进一步理解。更重要的是激发了学生课后自己动手来进一步验证其他理论知识的热情。
4 结语
将MATLAB仿真与自动控制原理理论教学相结合的教学方式,吸引了学生对理论知识学习的兴趣,活跃了课堂气氛,同时锻炼了学生的动手能力,加深对所学知识的理解,提高了课堂效率,值得借鉴。■
[1]刘海涛,赵娟,李伟洪.面向创新能力培养的自动控制原理教学方法研究[J].中国教育技术装备,2015(24):90-91.
[2]孙秀云.自动控制理论课程教学与MATLAB软件相结合的教学改革思路[J].求知导刊,2015(22):89.
[3]王建辉,顾树生.自动控制原理[M].北京:清华大学出版社,2014:272-275.
[4]王玲玲,丁学用.MATLAB在自动控制系统串联校正中的应用[J].科技视界,2015(22):65-66,98.
Application of MATLAB in Automatic Control Theory Teaching
// NⅠU Huifang, MENG Qing, ZANG Junbin
The paper assimilates MATLAB software simulation into the automatic control theory teaching, combining the point of cascading leading compensation in control system compensation. Ⅰt makes the theoretical knowledge specifi c and vivid through visualized simulation results, also stimulating the students’ learning interest,deepening students’ understanding of theoretical knowledge, and improving the effi ciency of the classroom.
principles of automatic control; MATLAB simulation;cascading leading compensation
G642.3
B
1671-489X(2016)14-0014-05
*项目来源:山西省青年科技研究项目“基于无线传感器技术的森林防火系统的研究”(基金编号:2015021095)。
作者:牛慧芳、孟青、臧俊斌,中北大学朔州校区助教,研究方向为工业计算机过程控制(036000)。
