汽轮机凝水调节的自动控制分析研究
2016-09-18张鲲羽李少军中国船舶重工集团公司第七四研究所上海200031
许 涛,张鲲羽,李少军(中国船舶重工集团公司第七〇四研究所,上海 200031)
汽轮机凝水调节的自动控制分析研究
许涛,张鲲羽,李少军
(中国船舶重工集团公司第七〇四研究所,上海 200031)
针对某汽轮发电机组凝水系统实际使用需求,介绍凝水调节系统自动控制的工作原理、组成和结构设计,采用 PLC 语言编制完成 PID 调节控制模块程序,该程序根据设定的水位值,自动向水位调节器执行机构发出模拟量指令信号,控制水位调节器开启或关闭至各管路的窗口,从而实现回水或排水功能。通过专门搭建的试验平台模拟实际使用工况对水位调节系统进行试验验证。试验验证结果显示设计的水位调节器及水位自动控制程序在各种变工况条件下均能维持水箱内设定的水位,为后续机组凝水系统安全稳定运行提供试验数据支撑。
汽轮发电机组;凝水系统;PID调节控制模块;水位调节器
0 引 言
凝水系统是汽轮发电机组系统的重要组成部分,主要包括冷凝器、电动凝水泵、抽气器、水位调节器、汽水分离器等。冷凝器把汽轮机末级的乏汽经海水冷却后,通过电动凝水泵从冷凝器内抽送,在循环系统中达到了冷却的作用。冷凝器水箱中水位的高低直接影响到冷凝器的工作性能,进而影响整个蒸汽动力装置的热经济性和安全可靠性。水位过高,将减少蒸汽的冷却面积,影响冷凝效果,从而引起真空度的下降,降低汽轮机的有效焓降以及整机的热效率;水位过低,将影响凝水泵的工作性能,当凝水泵的吸入压力过低时,将发生气蚀现象,更加严重时会造成设备的损坏[1]。因此,凝水系统中必须设置有水位调节装置,以使冷凝器水位维持在合理范围内[2]。在凝水系统中,水位调节器自动调节冷凝器内的水位,使冷凝器的水位在机组任意工况下均能维持在一定的高度范围内,从而保证汽轮发电机组的正常运行,因此它是汽轮机凝水系统的关键设备。
1 凝水系统工作原理
凝水系统工作原理如图 1 所示。由图可知,冷凝器水箱内的凝水通过凝水泵进入抽气器后,再经过水位调节器排至热井或回至冷凝器。当水位调节器处于自动调节状态时,若冷凝器水箱水位高于控制箱逻辑程序设定值,控制箱输出控制信号指令,电动执行机构向上运动,使排水窗口打开,同时回水窗口关闭,使冷凝器水箱水位下降;反之,若冷凝器水箱水位低于控制箱逻辑程序设定值,控制箱控制电动执行机构向下运动,排水窗口关闭,同时回水窗口打开,冷凝器水箱水位上升。
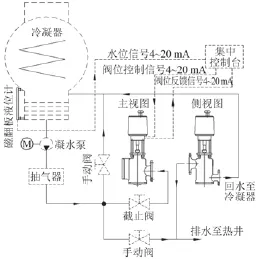
图 1 凝水系统工作原理图Fig. 1 Condensate water system operational principle schematic
2 水位调节系统工作原理、组成
水位调节系统主要包括水位调节器、磁翻板液位计、控制箱等。其中水位调节器由执行机构、壳体、滑阀等组成,如图 2 所示。磁翻板液位计用于测取冷凝器水箱的水位信号,将水位的高度信号转化为 4~20 mA的电信号并输出至控制箱。控制箱根据水位实际高度与设定高度之差,向执行机构发出指令信号,使执行机构带动滑阀上下移动,从而开启或关闭至各管路的窗口。滑阀全行程为 12 mm,向上运动开启排水窗口,向下运动开启回水窗口。
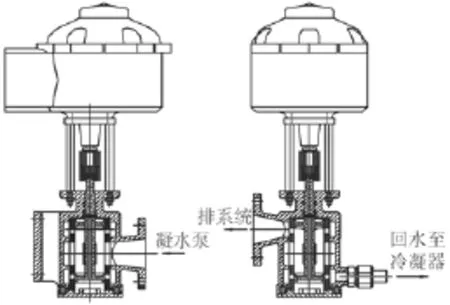
图 2 水位调节器图Fig. 2 Water level modulator scheme
2.1水位调节器
水位调节器的执行机构采用英国 ROTORK 公司生产的 CVL-500 电动执行机构,图 3 为电动执行机构示意图。它通过电机传动齿轮控制调节阀杆上下移动来实现凝水系统的平衡。CVL-500 电动执行机构具备 2个独立的位置传感器,齿轮间隙误差和位置误差可以减至最低;采用高效、无刷的直流电机,保证了连续无限制调节下的自由动作;采用简单、耐用的高效直齿轮传动,具有较高的可靠性;具有反转保护可承受来自阀门 125% 额定力的任何反转推力;“双密封”设计的接线终端为动力、控制和反馈指示提供了紧凑的连线接口。
电动执行机构的相关参数如表 1 所示。
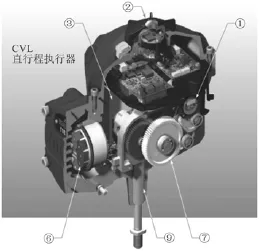
图 3 电动执行机构示意图Fig. 3 Motor-driven actuator diagrammatic sketch

表 1 电动执行机构参数Tab. 1 electric actuator parameters
2.2磁翻板液位计
磁翻板液位计用于测量冷凝器水箱的水位,并输出 4~20 mA 水位信号。磁翻板液位计通过上下 2 个法兰与冷凝器相连接,总量程为 500 mm。磁翻板液位计浮筒内装有浮子,内置磁铁,外侧依次排列带有永久磁铁的双色翻板,其外形与内部结构如图 4所示。浮子位置随水位变化进行上下移动,通过磁性将外侧的翻板翻转,因此水位变化可直观反应到磁翻板上,同时水位的高低可通过电流信号输出到控制箱,实现对水位的反馈。
2.3水位调节自动控制系统
图 5 为水位调节器控制逻辑图。冷凝器内的水位主要通过磁翻板液位计进行测量。通过测取冷凝器水箱的水位信号,将水位的高度信号转化为 4~20 mA 的电信号并输出至控制箱。控制箱根据水位实际高度与设定高度之差进行逻辑运算,向执行机构发出模拟量指令信号,使执行机构通过传动机构带动滑阀上下移动,从而开启或关闭至各管路的窗口,实现回水或排水功能。同时磁翻板液位计将实时的水位信号反馈至机旁控制箱,电动执行机构阀位信号也反馈至机旁控制箱,机旁控制箱根据此两路反馈并进行逻辑运算,再次输出模拟信号,控制电机的正、反转,进而维持冷凝器内的正常水位。
为了配合水位调节器系统,在控制箱中增添了接收磁翻板液位计的 4~20 mA 的水位信号和输出阀位控制信号。
控制箱中控制器采用西门子的 S7-300,接收磁翻板液位计的水位信号(图 6),水位 0~500 mm 分别对应 4~20 mA 电信号。
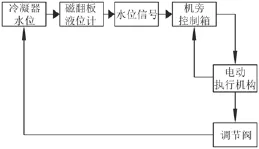
图 5 凝水系统控制图Fig. 5 Control chart of condensate system
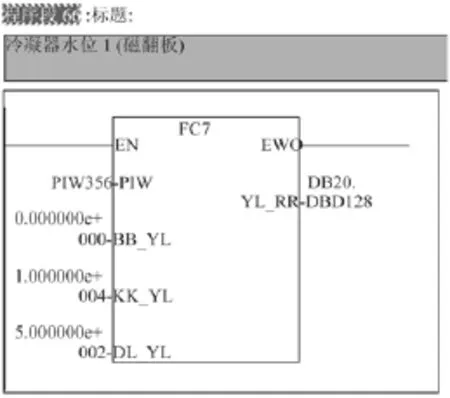
图 6 磁翻板水位Fig. 6 Magnetic turning plate water level

图 7 PID 调节模块Fig. 7 PID adjustment module
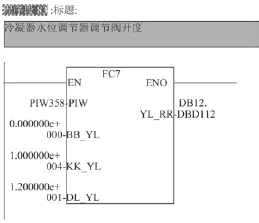
图 8 水位调节器调节阀开度控制Fig. 8 Control valve opening control of water level regulator
在控制箱的程序中自定义建立了 PID 调节模块[3 - 7](图 7),控制逻辑程序将采集到的磁翻板水位信号和电动执行机构的阀位信号进行 PID 逻辑运算,把运算结果作为模拟信号输出给电动执行机构,向执行机构发出指令信号,使执行机构带动滑阀上下移动(如图 8),滑阀全行程为 12 mm,向上运动开启排水窗口,向下运动开启回水窗口。所以水位调节器的调节阀开度从 0~12 不断变化,保持水位稳定。
在逻辑控制程序中还设置了故障报警功能,水位整定值设置为 300 mm,当水位低于 100 mm 或高于470 mm 时,会触发程序中水位高/低标志位,进而触发控制箱的水位低/高报警功能(见图 9)。
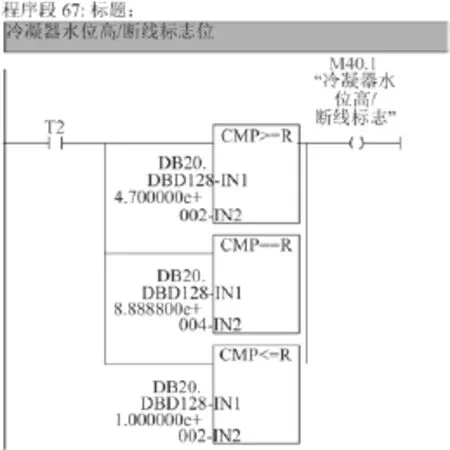
图 9 水位高/低程序控制Fig. 9 Water level high/low program control
3 水位调节试验及分析
为了确保水位自动调节功能实现,搭建了专用试验平台,模拟凝水系统对设计的水位调节器进行了模拟试验,试验内容主要包括静态试验和动态试验,通过静态试验可实现不同进水量的模拟,以研究各个工况下水位调节器的性能及其对凝水泵的影响,掌握冷凝器水箱水位波动的情况;动态试验则用于模拟突加突卸过程,以评价水位调节器的动态性能。
试验系统原理如图 10 所示。
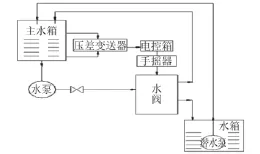
图 10 水位调节器试验原理图Fig. 10 Schematic diagram of water level regulator test
试验结果见表 2 和表 3。详细的试验数据见《水位调节器试验表》。
通过试验可知,在试验室内专用试验台架上,通过控制箱中 PID 模块的调节,该水位调节器能很好地对水箱内的水位进行自动调节。
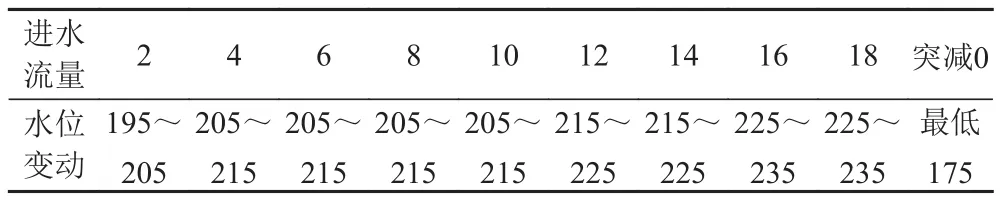
表 2 水位调节器试验记录1Tab. 2 Water level regulator test record 1
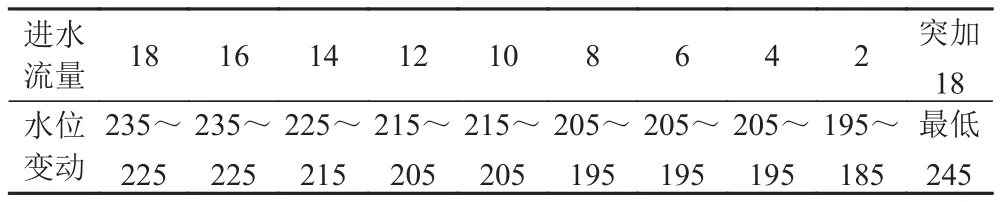
表 3 水位调节器试验记录2Tab. 3 Water level regulator test record 2
4 结 语
通过分析可知,汽轮机排汽在冷凝器内部经冷却后并进入冷凝器水箱,水箱底部设有管路联接至凝水泵,凝水经由凝水泵增压后分两路,一路直接进入水位调节器、另一路经抽气器后进入水位调节器,水位调节器根据汽轮机排汽量的大小调节阀门开度,改变排水管路与回水管路的流量分配,使冷凝器水箱水位保持恒定[8]。从而保证汽轮发电机组的正常运行,因此,水位调节器是汽轮机凝水系统的关键设备。
[1]胡宗成,高怡秋,杨懿. 凝水系统水位调节阀流量系数特性研究[J]. 舰船科学技术,2013,35(10):65-68,73. HU Zong-cheng,GAO Yi-qiu,YANG Yi. Research on flow coefficient of level control valve in condensate water system[J]. Ship Science and Technology,2013,35(10):65-68,73.
[2]陈亮. 主冷凝器水位调节器的设计研究[D]. 哈尔滨:哈尔滨工程大学,2005.
[3]李鑫. 浅谈西门子PLC的PID参数整定[J]. 科技视界,2014(14):89,111.
[4]任俊杰,李永霞,李媛,等. 基于PLC的闭环控制系统PID控制器的实现[J]. 制造业自动化,2009,31(4):20-23.
[5]孙小权,钱少明. 基于PLC的PID控制器设计与实现[J]. 应用科技,2008,35(6):29-32.
[6]姚振群,杨东方. PLC闭环控制系统中PID控制器的实现[J].现代机械,2005(4):64-65,77.
[7]曾海燕. 基于西门子PLC的结构化PID控制器设计与实现[J].国内外机电一体化技术,2011(2):18-20.
[8]须一宏,朱蕾,靳军. 小型汽轮机凝水系统的特性匹配与计算[J]. 电站辅机,2009,30(2):16-19,43.
Analysis of automatic control turbine condensate water conditioning
XU Tao,ZHANG Kun-yu,LI Shao-jun
(The 704 Research Institute of CSIC,Shanghai 200031,China)
In this paper a condensate water system of the steam turbine unit,the author of this paper practial use requirements,condensate regulating system are introduced,the working principle of automatic control,composition and structure design,PLC language compiled the PID control module program,the program according to the water level of the set value,automatic water level controller to actuator signal analog instruction,control the water level regulator open or close to the window of each line,so as to realize water or drainage function. Through specially built test platform to simulate the actual working conditions of water level control system for the test. Test results show that the design water level regulator andwater level automatic control program can maintain in various operating conditions set water tank water level,for subsequent condensate system provide a test data to support the safe and stable operation.
steam turbo generator unit;condensate system;The PID control module;water level regulator
U664.1
A
1672 - 7619(2016)08 - 0086 - 04
10.3404/j.issn.1672 - 7619.2016.08.018
2015 - 11 - 23;
2016 - 02 - 02
许涛(1987 - ),男,硕士,助理工程师,从事自动化控制及电气控制设计工作。
