地面三维激光扫描技术在港口可视化的应用研究
2016-09-16牛作鹏中交第二航务工程勘察设计院有限公司湖北武汉430071
牛作鹏(中交第二航务工程勘察设计院有限公司,湖北 武汉 430071)
地面三维激光扫描技术在港口可视化的应用研究
牛作鹏
(中交第二航务工程勘察设计院有限公司,湖北 武汉 430071)
本文介绍了三维激光扫描技术的基本原理,以某港口工程为例,详细说明应用地面三维激光扫描技术实现点云数据获取、点云数据处理、三维模型构建的方法,验证利用该技术进行港口可视化的可行性,解决常规测量技术在特殊领域的应用不足,为“数字港口”建设提供有力的技术支持。
地面三维激光扫描;点云;三维建模;可视化
引 言
“数字港口”是港口信息化建设的重要战略目标,是以“数字地球”为引向、以港口应用为对象、以空间信息为依据的技术系统。测绘科学技术在基础数据支持方面发挥着重要的作用,考虑到常规测量技术在特殊领域的应用不足,提出采用地面三维激光扫描技术进行空间信息的获取。
三维激光扫描技术的发展为人们在空间信息获取方面提供了全新的技术手段,它被誉为继GPS技术以来测绘领域的又一次技术革命[1]。三维激光扫描系统可分为地面激光扫描系统和机载激光扫描系统两大类,该系统能够非接触地快速获取复杂局部地区的空间信息,并迅速转换成可以被计算机处理的信息数据。目前,三维激光扫描技术主要应用于三维模型构建、变形观测、常规地形测绘、虚拟现实[2]等众多领域,并积累了大量的成功案例,解决了传统测绘方法在港口工程等特殊领域的应用不足。
本文基于三维激光扫描技术的工作原理,详细论述该技术的作业流程,并以江苏省句容市境内某港口工程为例,探索其空间信息获取,进行港口地物三维建模及可视化应用研究。
1 地面三维激光扫描系统的工作原理
地面三维激光扫描系统由集成了后处理软件、内置数码相机以及附属设备的三维激光扫描测量仪组成,该系统可以快速获取物体表面每个点的空间坐标及颜色信息。但要完成此项工作,必须研究计算模型、误差模型、误差的传递和影响、误差的消除和矫正,再确定有关的计算公式及相应的算法。它还包括数据预处理及后处理技术,如粗差探测、数据重采样、数据镶接等[3]。
三维激光扫描系统的工作原理基本分为3种:基于相位差测距、基于脉冲飞行时间测距和基于激光三角形。本文重点阐述基于相位差测距的工作原理,三维激光扫描仪通过对调制光波产生的相位延迟进行测量,计算光波往返于目标点之间的时间,进而获取三维激光扫描仪与目标点之间的距离,再根据空间点位几何关系解求点位空间地理坐标。该系统一般采用以其自身特定的坐标系统为基准的独立坐标系,详细定义如下:X轴在横向扫描面内,Y轴在横向扫描面内垂直于X轴,Z轴在竖向扫描面内垂直于X轴和Y轴。如图1所示。
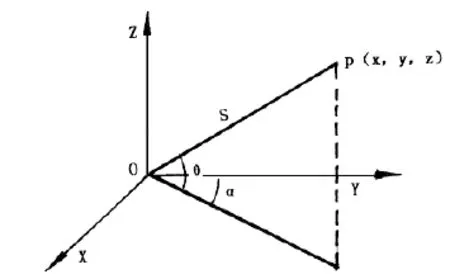
图1 地面三维激光扫描系统工作原理
2 作业流程
地面三维激光扫描系统的作业流程大致可以分为空间信息数据获取和信息数据后处理两部分。空间信息数据获取主要包括点云数据获取、点云数据质量分析和点云数据质量控制等内容;信息数据后处理主要包括点云滤波、不同站点数据配准、点云数据去冗、地物地貌数据获取、三维建模和纹理贴图等工作。
2.1空间信息数据获取
首先对工作区周围环境进行踏勘,确定三维激光扫描仪距离物体的大致距离及采样密度,空间信息数据获取不可盲目追求高密度,此举将会增加现场扫测时间及难度,降低后期数据处理效率,展现不出三维激光扫描技术在快速信息数据获取方面的优势。因此,现场扫描尽可能参考如下作业准则:在保证所扫描的空间信息数据能够覆盖本工作区域的前提下,选择尽量少布设扫描站,以减少数据冗余。对于地形复杂区域,还需对测区的地物及特殊地形进行拍摄照片,便于后期的内业处理,扫描站之间标靶的分布应以能获得较好的坐标配准精度为原则,同时还需获取标靶中心的施工坐标,用于后续多站数据的配准。
2.2点云数据配准及缩减
点云数据配准就是将不同角度所扫描的点云数据统一到一个坐标系统下。点云配准以后存在一定程度上的数据冗余,数据冗余占用大量的存储空间,同时也降低数据后处理的质量和速度,因此要在不损失精度的前提下对数据进行去冗处理。
2.3地物地貌数据获取
点云数据配准以后可以手工提取地物特征线(点),如道路边界线、电线杆中心点、房屋轮廓线及房角点等。市场上多种品牌的地面三维激光扫描后处理软件均可完成此项工作,并辅以专业绘图软件(如南方CASS、清华山维)完成地物绘制。目前还没有相应的软件能够实现非地貌数据(例如树木、植被及地物等)的自动剔除,均需要人工操作完成此项工作,本文拟采用美国Trimble的ReaLWorks Survey软件完成人工剔除非地貌点云数据。
2.4三维建模
Application of appropriate ecological energy-saving technology in reconstruction design of existing buildings
三维建模是构建一定的数学模型实现几何空间抽象描述、对象简化和管理,可分为以下3种建模方式:通过三维软件完成建模工作、通过仪器设备测量完成建模工作和通过图像视频完成建模工作[4~5]。相对于前两种建模方式,通过图像视频完成建模具有自动化程度高、真实感强及成本低廉等优势,因而具有广泛的应用前景。本文采用美国Trimble公司旗下的SketchUp软件完成港口三维建模工作。
2.5纹理贴图
纹理贴图又称纹理映射,是用函数、图像和其它数据源通过一定算法将一幅图像贴到三维物体的表面上,并辅以灯光、阴影和图像混合等渲染技术,生成许多非常漂亮的场景效果,以此增强真实感。
3 案例分析
基于上述原理和工作流程,选择江苏省句容市境内的长江某港口工程为例,进行三维激光扫描数据采集和处理。本文所做的三维数据采集利用的是美国Trimble公司的TX5地面三维激光扫描系统,后处理软件用的是Real Works Survey软件,三维建模采用美国Trimble公司旗下的Sketch Up软件,现场大地坐标标记点由Trimble R8进行坐标的量测,量测精度满足规范要求。
3.1点云数据获取
采用Trimble TX5地面三维激光扫描系统进行数据采集。TX5的主要技术指标:采用相位式测距法;扫描速度976 000点/s;测程范围0.6~120m;视场角水平360°,竖直300°;测距误差±2 mm。
根据测区的特点和周围环境确定测站数为7站,涵盖了码头上大部分构筑物,整体点云效果如图2所示。由于分站扫描,所以在实地放置了配准球,并由Trimble R8进行坐标的量测,以做后期数据拼接配准使用。

图2 局部点云效果
3.2点云数据处理
原始点云数据中存在大量非地貌数据,该部分数据的存在导致正确信息无法提取,需进行点云滤波处理。本文采用Trimble Real Works Survey中的点云滤波工具完成去噪操作,滤波单元间隔设置为1m,将水平面作为参考滤波平面进行迭代线性最小二乘内插模型残差法滤波计算,而对于噪声较大的数据需要进行手工剔除。
本文采取特征点配准的方法,将点云数据配准到施工坐标系下,采用Trimble R8进行现场标记点坐标的量测。特征点的选取应优先采用目标反射物,或者较为明显的构筑物特征点。值得注意的是,因点云数据有少量缺失,则利用了同名点对进行配准,同时辅以手工进行配准。
3.3三维建模及可视化
点云数据中难以表达局部特征,需要手工对扫描体进行模型构建[6],笔者借助Auto CAD和Sketch Up软件基于外业获取的点云数据,完成扫测区域内建(构)筑物的三维建模及纹理贴图工作,如图3和图4所示。此项工作的完成可满足本公司设计人员与业主即时交流的需要,使得设计人员可以直接在电脑上进行十分直观的构思。

图3 基于Sketch Up生成的三维模型(局部)

图4 基于Sketch Up生成的三维模型
可视化是指在计算机屏幕上显示并进行人机交互三维数据的过程,用户通过人机交互操作可以选择并处理计算机屏幕上的三维数据,以帮助用户在多方位、多角度及不同距离的视图下对其进行全方位的分析浏览。将Sketch Up软件建立的模型导入Lumion可视化软件中,可充分结合Lumion可视化的高效性和Sketch Up绘图的高自由度,快速直接的创建虚拟现实(图5),增强用户与数据、模型之间的交互操作性能。

图5 码头不同角度三维可视化
Lumion是荷兰ACT-3D公司发布的一个将高效和快速的工作流程集成在一起并可实时三维可视化的软件,通过Lumion可视化软件,用户可以将Sketch Up以及其它格式的3D数据导入Lumion可视化软件中创建逼真的虚拟现实环境,然后通过图像处理器高速渲染的方式制作漫游动画,Lumion可视化软件大幅降低了漫游动画制作成本,同时展现出高质量的可视化效果。
4 结 语
本文以江苏省句容市境内的某码头工程为例,阐述了利用点云数据构建三维模型的作业流程,研究发现基于高精度点云数据并辅以相应的建模软件,可以快速构建三维仿真模型,实现三维可视化,直观便捷的展现效果降低了现场各方人员之间的沟通成本和出错概率,提升各专业人员的协同工作效率,为原始数据获取提供了一种崭新的技术手段,解决了常规测绘技术在特殊领域的应用不足,为三维激光扫描技术在“数字港口”中的建设应用初步探索了一套全新方法。
基于点云数据的建筑物三维建模,一定程度上保证了建筑物三维模型的精度,增强建筑物三维模型空间地理信息的可靠性,并可高质量的展现港口内主要设备设施的可视化效果。同时,在建筑物三维建模方面,基于点云数据实现自动提取不规则边界信息还需要进一步研究和完善。
[1]董秀军.三维激光扫描技术及其工程应用研究[D].成都:成都理工大学,2007.
[2]惠增宏.激光三维扫描重建技术及其在工程中的应用[D].西安:西北工业大学,2002.
[3]李必军,方志祥,任娟.从激光扫描数据中进行建筑物特征提取研究[J].武汉大学学报(信息科学版),2003,28(1):65-70.
[4]纪勇,李孝雁.三维激光扫描技术在水利工程建设中的应用[J].黄河水利职业技术学院学报,2008,20(1):23-25.
[5]刘春,杨伟.三维激光扫描对构筑物的采集和空间建模[J].工程勘察,2006,(4) :49-53.
[6]赵小平,刘文龙,高绍伟.基于三维激光扫描技术的校园可视化[J].测绘通报,2011,(8):45-47.
[7]洪德法,杨国东,王志恒.基于 Arc Scene 和 Sketch Up的虚拟校园的建立[J].计算机技术与发展,2008,(12):41-43.
[8]Sui Lichun.Processing of Laser Scanner Data and Extraction of Structure Lines Using Methods of the Image Processing[J].测绘学报,2004,33(1):63-70.
Research on Application of Ground 3D Laser Scanning in Harbor Visualization
Niu Zuopeng
(CCCC Second Harbor Consultants Co.,Ltd.,Wuhan Hubei 430071,China)
An introduction to basic principles of 3D laser scanning technique has been given to describe in detail the application of ground 3D laser scanning technique in the acquisition and processing of point clouds data,and 3d modeling on the basis of one harbor project.In addition,the feasibility of harbor visualization by using the technique has been verified.The above technique will solve the limitation of conventional surveying technique for some special fields,and support the construction of digitized harbor well.
ground three-dimensional laser scanning; point clouds; 3D modeling; visualization
P225.2
A
1004-9592(2016)04-0101-04
10.16403/j.cnki.ggjs20160425
2015-11-26
牛作鹏(1985-),男,工程师,主要从事测绘新技术研究工作。