潜艇自航模操纵性试验的模型设计
2016-09-15肖昌润杜佩佩
刘 洋,肖昌润,杜佩佩
(海军工程大学 舰船工程系,武汉 430033)
潜艇自航模操纵性试验的模型设计
刘洋,肖昌润,杜佩佩
(海军工程大学 舰船工程系,武汉 430033)
针对潜艇自航模实际加工过程中系统设备布置问题,设计一种用于复杂结构体重量重心及转动惯量测量装置,解决潜艇自航模内部构件的测量问题;运用Isight数据优化软件对自航模内部构件的布局进行优化,为自航模内部构件的装配提供较为准确的布局形式;同时对自航模内部自调装置进行相应的设计,消除工装误差的影响,使自航模重心位置、转动惯量更加准确,使自航模操纵性试验能够更加准确地反应实艇的操纵性能。
潜艇自航模;相似性准则;重心位置;转动惯量
为了使模型试验较为准确地反应实艇的操纵性能,潜艇自航模与实艇之间需要满足几何相似、运动相似等相似条件。自航模的加工是以实艇型线并按照所需缩尺比制作的,与实艇之间满足几何相似,同时要达到与实艇之间的运动相似,则要求自航模要达到与实艇的重心相似、质量分布相似,具体表现为保证模型的重量、重心位置和质量惯性矩相似[1-3]。对于水下潜艇自航模而言,外部型线较为特殊,内部空间有限、封闭、水密而且不易拆解,其重量、重心位置及转动惯量的测量、内部复杂结构件重心相对位置及自身转动惯量的测量、仪器设备的空间布置方法以及工装误差的消除,一直是保证两者运动相似的重要部分[4]。因而,正确的对自航模壳体及内部复杂结构体进行重量重心、转动惯量测量,探索实用的方法来保证自使自航模布置更加准确、消除工装误差对自航模装配的影响,是使自航模与实艇之间满足运动相似的重要条件。
1 自航模整体布置
根据某型潜艇的线性按照一定的缩尺比得到潜艇自航模,由外部壳体、艉部螺旋桨、艉部水平舵及垂直舵、指挥台围壳及围壳舵、内胆框架以及外部相应的测量、水声、抛载设备等部分组成[5]。自航模由5个分段构成,各分段之间由螺栓法兰连接,为了保证壳体的密封性,各分段间安装有密封圈。同时,为了保证艇体的耐压刚性,各分段内胆采用纯钢制结构,并通过运用玻璃钢外层来满足潜艇自航模的型线。除艏部和艉部的分段外,在中间3个分段内装有导轨,便于内部构件的装配。内部构件的主要载体为内胆框架,构件装配在内胆框架内 ,再通过导轨将内胆框架装配到艇体内部,装配效果如图1所示。
自航模为满足操纵性试验要求,内部设备较多,根据各自的功能分为不同的构件,见图2。
2 自航模壳体重量、重心及转动惯量的测量
自航模与实艇之间要满足相似准则,模型准备需保证重量、重心位置和质量惯性矩相似,设λ为缩尺比,具体要求为
(1)
式中:m——模型;
s——实船;
D——排水量,m3;
xg,zg——重心的纵向和垂向位置,m;
Iy,Iz——艏摇、纵摇的质量惯性矩,kg·m2。

图1 自航模总布置示意
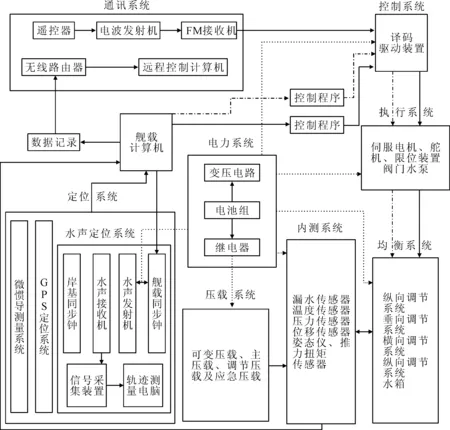
图2 系统组成
在质量惯性矩方面,第15届ITTC建议,取0.25Lpps作为船舶的纵向惯性半径,0.35Bs作为船舶的横向惯性半径,以此来计算船舶的质量惯性矩[6],即
(2)
式中:Lpps——实船垂线间长,m;
Bs——实船船宽,m。
2.1自航模壳体测重及重心纵向位置的确定
自航模重量的测量采用地磅秤进行。重心的纵向位置运用支点法进行测量,设置两处距离较远的测量点,减少测量误差的影响,根据力和力矩相对重心的平衡,来得到中心的纵向位置[7]。如图3所示,设置测量点a和b,量取两测量点间的距离lab、lo,分别测量a、b两点的重量根据公式计算出重心的纵向相对位置la、lb。
(3)
(4)

图3 重心纵向位置测量示意
2.2重心垂向位置测量
对于潜艇自航模垂向位置的测量,由于潜艇自航模没有上甲板,整体呈圆筒状,无法做横倾试验,根据水面舰船横倾试验原理运用纵倾试验来测量潜艇自航模重心高[8]。如图4所示,加重物P在船模a处,保证船模平衡,同时刀刃处于重心所在横剖面内,测量出此时刀口处距基线的距离ZM,基线取地面,移动重物P至b处,待船模稳定后,测量出此时a处至b处的长度lab、重心距船模最尾部距离l、船模平衡是尾部距地面高度h1、纵倾后尾部距地面高度h2以及船模平衡时直筒段底部距地面高度hd,取下重物P并测量重物P的质量mp,模型质量为m,记录数据处理数据得到船模重心相对于地面的高度ZG,根据下列公式得到相对于艇体基线的中心高度ZG0。
(5)
(6)
(7)
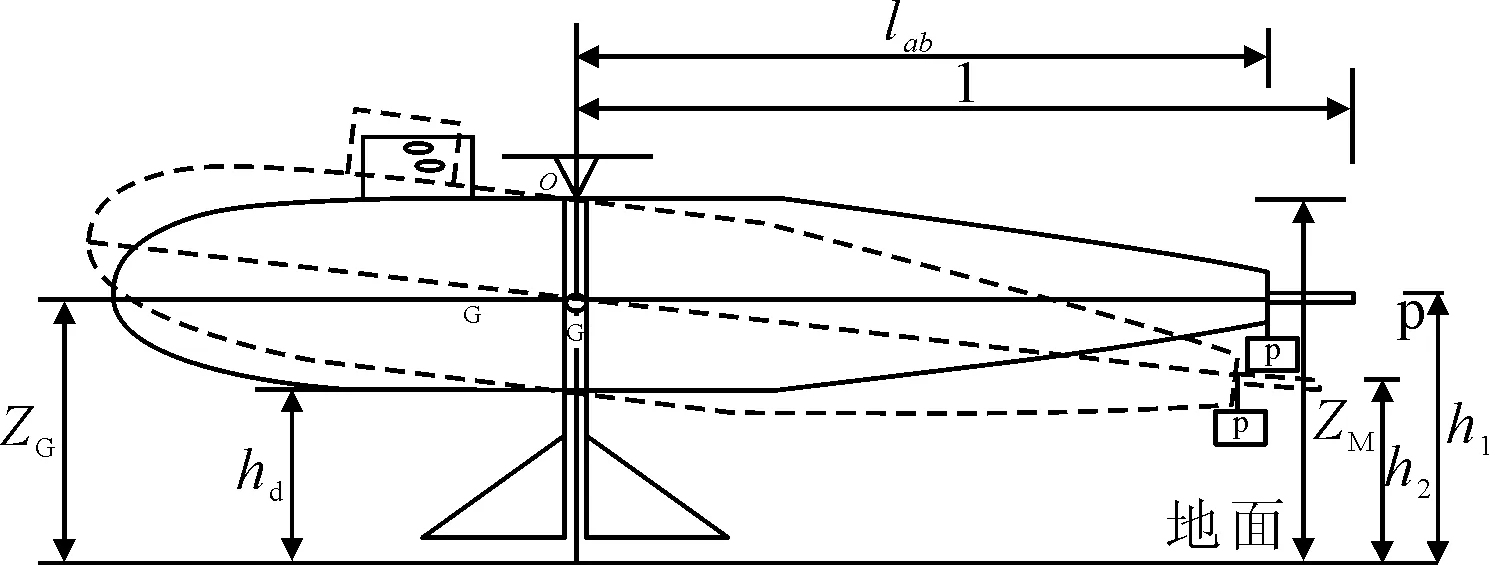
图4 重心垂向位置测量示意
2.3艏摇质量惯性矩的测量
对于潜艇自航模壳体纵摇质量惯性矩的理论计算中,可以运用平行于中横剖面的平面将自航模分割成有限多个部分,求出每一部分的质量对横轴的质量惯性矩然后积分得到模型纵摇质量惯性矩。同理,潜艇自航模壳体艏摇质量惯性矩的计算也可以按照此方法。而潜艇自航模壳体相对于中纵剖面对称,由于围壳长度相对于艇长为小量壳近似认为壳体相对于中线面基本对称,则每一部分重心的横向坐标y远小于纵向坐标x,而垂向坐标z同样小于纵向坐标x,即
∫Mx2dm+∫Mz2dm≈∫Mx2dm
(8)
∫Mx2dm+∫My2dm≈∫Mx2dm
(9)
从而可以认为潜艇自航模壳体纵摇质量惯性矩与艏摇质量惯性矩近似相等,即:
(10)
实际测量中,自航模艏摇惯性矩较为容易进行,采用测量艏摇惯性矩的大小来确定纵摇、艏摇惯性矩[9]。如图5所示采用双垂线悬挂的方法来测量,将模型壳体用两根钢丝悬挂起,调整悬挂点使悬挂点与重心处于同一高度并分别测量悬挂点距离钢丝着力点距离l1、l2,测量悬挂点距重心的纵向距离la、lb,令船模自由摇艏,待船模平稳后记录10个艏摇周期所用时间T1、T2、T3,并根据数据得到实验结果Iz。其中m为模型质量;Mc为艏摇恢复力矩;φ为艏摇角:
Mc=magα1la+mbgα2lb
(11)
(12)
由刚体绕定轴转动的微分方程
(13)
可得通解为
(14)
故:
(15)
又由测量数据可得
(16)
通过上述公式计算可得到
(17)
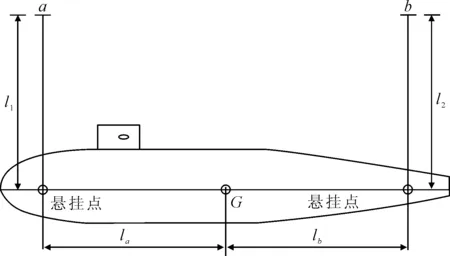
图5 艏摇质量惯性矩的测量示意
3 自航模内部设备重量、重心及转动惯量的测量
自航模内部设备是自航模重量、重心,以及转动惯量的主要影响因素,需要对其进行较为准确测量。但自航模内部设备多为不规则几何体,按照理论公式计算无法计算出相应的重心和转动惯量,需要运用工程测量的方法来得到相应的数值。为了使测量达到较为准确的精度,制作测量复杂物体重心转动惯量的器械进行测量。重心的测量采用支点法,原理与自航模壳体重心纵向位置测量原理相同;转动惯量的测量运用具有较高精度、测量较少、测量时间较短、设备费用较低的复摆测量法[10]。复摆又称为物理摆复摆,摆动的不是一个质点,而是一个物体绕定轴O摆动,摆动角度较小的情况下(一般不超过5°),即φ小于5°时,其摆动方程为
(18)
摇摆周期为
(19)
式中:
J=J0+mL2
(20)
其中:J——物体绕转轴O的转动惯量;
L——物体质心距离转轴O的距离;
J0——物体绕自身质心的转动惯量。
通过测量摆振周期T来得到J0。
(21)

图6 复摆示意
在测量潜艇自航模内部构件转动惯量时,由于内部构件属于中小体积构件,采用复摆法较为准确、易操作。如图7所示,结构机构由支撑结构、称重传感器、刀口、物体摆放架、物体固定吊带、固定脚架、吊杆、摆动轴、支撑轴等部分构成,称重传感器、刀口、物体摆放架用于重量重心的测量;物体固定吊带、固定脚架、吊杆、摆动轴、支撑轴等部分用于物体转动惯量的测量,同时固定脚架可以绕吊杆旋转90°,以便测量不同方向的转动惯量。
4 自航模整体布置
4.1自航模整体重量、重心及转动惯量布置规则
自航模内部设备重量通过测量得到,重心以及转动惯量需要通过理论计算得到。自航模的总重量为各模块重量之和,各模块重量分别测得为Wi,其相对应的重心在自航模中的位置为(Xi,Yi,Zi),则自航模的总重量为
关于重心的计算,由已知设备的重量及其重心相对基准轴的位置得到各自质量矩并与当前整体质量的比值为当前整体的重心位置。
(22)
式中:XGi、YGi、ZGi——分别为当前的重心位置。
通过与理论重心位置比较,粗略调整各设备位置,使实际重心位置与理论重心位置接近,做到设备的初步布置。
关于转动惯量的计算,由已知设备的重量及其重心相对基准轴的位置得到各自质量惯性矩并与其自身转动惯量的和为当前设备相对于基准轴的转动惯量,再将各转动惯量相加,得到当前整体的转动惯量:
(23)
式中:IXi、IYi、IZi——分别为相对于自身重心位置的转动惯量;
IX、IY、IZ——为当前整体相对于基准轴的转动惯量。
通过与转动惯量比较,进一步调整各设备位置,在满足实际重心位置与理论重心位置相接近的前提下,同时满足实际转动惯量的数值与理论转动惯量的数值相接近,从而做到对自航模内部设备的二次布置。
4.2自航模内部设备布置优化
在根据自航模实际可布置尺寸以及各设备的真实尺寸进行粗略布置的基础上,利用Isight软件进行优化,将潜艇自航模内部构件按照一定的顺序进行列举,同时记录每件构件的尺寸、重心位置以及每件构件相对于自身的转动惯量,并根据自航模内被可装配空间制定出配件可安装空间。以构件的重量、重心装配位置相对于已有坐标系坐标及自身转动惯量为输入变量,以要求的重量、重心及三轴向转动惯量为目标值,实际计算得到的重量、重心位置、相对于三轴的转动转动惯量为测量值,并以目标值与测量值差值的百分比作为控制量及约束条件进行Isight数据优化[11],得到要求偏差下的配件的重心装配位置,完成潜艇自航模内部的装配设计。j1至j6表示重量、重心位置、转动惯量偏差的百分比,X1到X18表示内部部件重心所在位置的纵向坐标,图8所示为j1至j3在±0.2%范围时内部部件重心所在位置的纵向坐标X10到X18。

图8 Isight优化效果
5 自航模重心及转动惯量的精确调节
自航模完成整体布置后,即对自航模进行装配,装配完成后需要对自航模重量重心及转动惯量进行测量、评定。由于自航模在装配的过程中存在着工装误差,无法做到精确装配到理论计算的位置,另一方面,自航模内部设备的线路和管道的布置,在装配之前无法精确计算,会对自航模的重量、重心和转动惯量的理论计算造成影响,从而使自航模的重量、重心及转动惯量无法精确地达到理论要求值。为了使自航模达到设计要求,满足与实艇间的重量、重心和转动惯量的几何相似,需要对装配完成的自航模进行重量、重心和转动惯量的调节。通常的做法是通过在自航模的内部放置压铁来实现,但是难以做到较为精确;同时,单纯通过摆放压铁无法兼顾到潜艇自航模的水下运动姿态,会对自航模的安全性造成不利影响,另外自航模内部空间较为狭小,压铁摆放较为繁琐,不易进行。
5.1重心纵向位置及艏摇、纵摇转动惯量
自航模重心的纵向位置的精确调节需要运用纵向调节模块及纵向调节水箱,见图9。
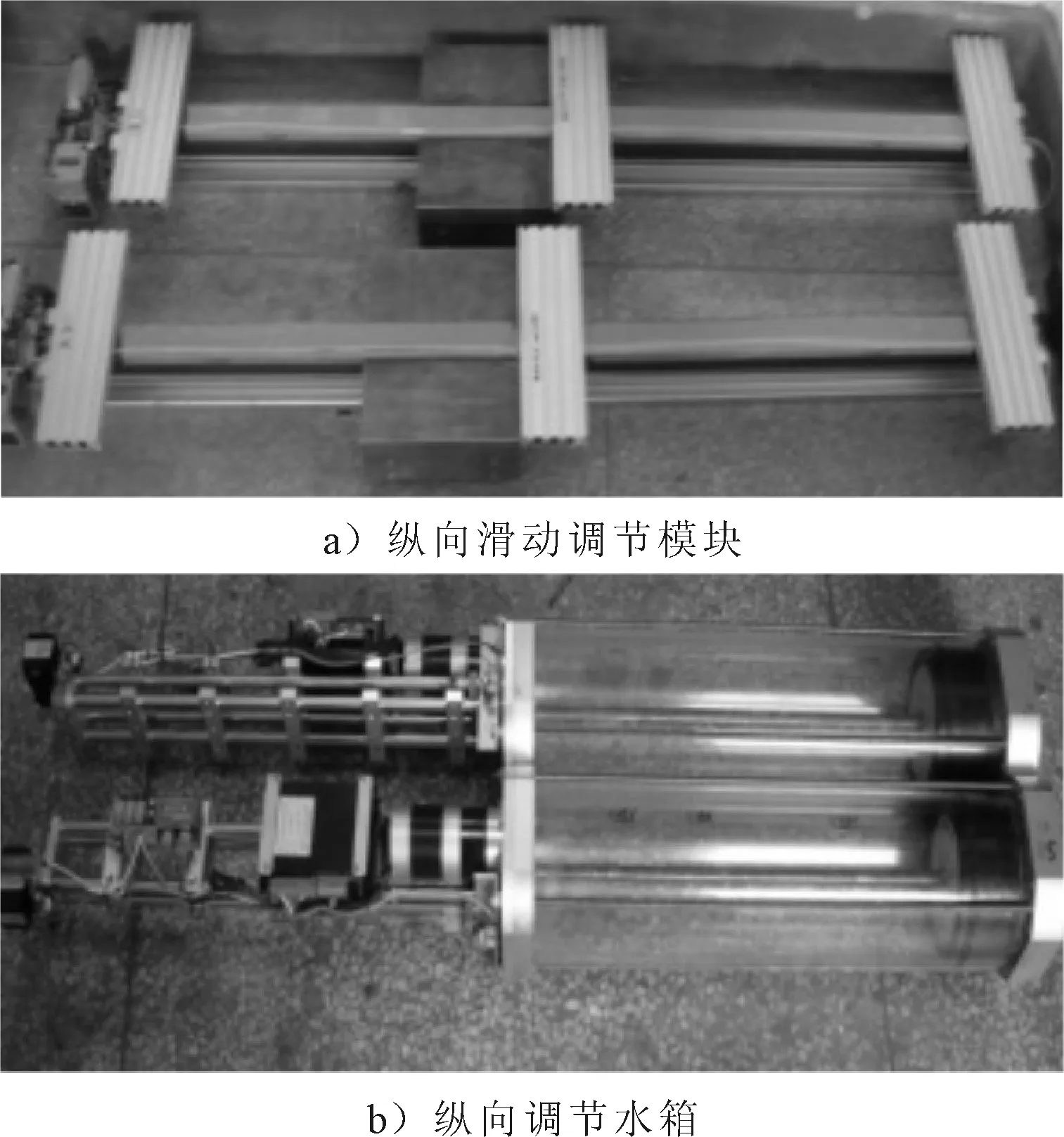
图9 X方向调节装置
纵向调节模块由支撑结构、轨道螺栓、移动压铁、电机、驱动器、控制单片机、位移传感器及限位开关组成。能够根据指令完成纵向的移动,分别装配在自航模的艏、艉部,完成对自航模重心的纵向调节。同时,对转动惯量的调节需要艏、艉部的滑块配合移动,可以达到在不改变重心的情况下,完成对摇艏、纵摇转动惯量的调节。纵向调节水箱与纵向移动模块结构较为相似,纵向水箱的移动部分为活塞,轨道为树脂套管,通过吸排水纵向调节水箱同时对自航模起到保护作用,在自航模发生紧急情况,而主压载水舱排水无法正常进行时,纵向调节水箱能够迅速排水配合抛载使自航模完成紧急情况的上浮。
5.2重心横向位置
自航模重心的横向位置的精确调节主要运用安装在艇体框架内的横向移动模块来完成。在装配过程中设备均是以艇体中线为对称来完成安装的,存在一定的安装误差,需要运用横向调节模块来使自航模达到正浮状态。横向调节模块由支撑结构、轨道螺栓、移动压铁、电机、驱动器、控制单片机、位移传感器及限位开关组成。能够根据指令完成纵向的移动,完成对自航模重心的横向位置的调节,如图10。
图10 Y方向调节装置
5.3重心垂向位置
在自航模装配过程中,由于装配过程需要考虑实际的装配条件,存在部件无法精确装配在预订高度的情况,需要垂向移动模块进行调节,要求垂向调节有几毫米至十几毫米的调节额度,需要垂向调节模块具有较大的质量和尽可能大的移动空间。在装配设计中将垂向移动模块安装在艇体重心垂向轴处,实现了移动空间的最大化,同时避免了大质量的移动模块上下移动时对艇体造成影响。垂向调节模块由支撑框架、轨道螺栓、移动压铁、电机、驱动器、控制单片机、位移传感器及限位开关组成。能够根据指令完成垂向移动以及对自航模重心的垂向位置的调节,调节装置见图11。
6 结论
以上对自航模的加工设计过程可以看出,要使自航模与实艇之间满足较为准确的运动相似,重点是准确布置自航模内部设备,前提是针对自航模加工设计中的重点部分(即:整体及内部复杂结构体重量重心和转动惯量的测量、自航模整体布置以及工装误差的消除)提出优化方案。所设计的复杂结构体的重心、转动惯量测量装置,解决了自航模内部复杂结构体重心、质量分布的测量问题;运用Isight数据优化优化布局,提供了内部设备准确的布置方案;设计自航模三轴向自调装置对自航模重心位置、转动惯量进行微调,达到了消除工程装配误差的目的,最终,得到与实艇间满足最佳相似性条件的自航模模型。
[1] 施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[2] 王京齐,施生达,张纬康.保障潜艇生命力的安全操纵技术研究[J].海军工程大学学报,2009,21(1):63-67
[3] 罗伟林,邹早建.基于岭回归方法的船舶操纵运动建模[J].船海工程,2009,38(6):17-19.
[4] 彭英声.舰船耐波性基础[M].北京:国防工业出版社,1989.
[5] 毕毅.潜艇自航模试验技术研究进展[J].海军工程大学学报,2012,24(5):58-64.
[6] HOU Wen, ZHENG Bin, YANG Rui-fen. A measuring method on moment of inertia of large-scale ammunition[J]. Journal of China Ordnance Society, 2005(1):41-46.
[7] 马勇,张亮,周广利,等.船模重量、重心及转动惯量测量系统设计[J].哈尔滨工程大学学报报,2011,32(1):6-10.
[8] 唐松.大尺寸复杂形状物体转动惯量测量技术研究[D].哈尔滨工业大学,2011(7):1-13.
[9] 冯艳秋.转动惯量测试系统设计及精度分析[D].长春:长春理工大学,2011,3: 5-13.
[10] 徐军华,徐兰珍,王树林.刚体转动惯量的一种新型测量法—复摆法[J].西安邮电学院报,2004,9(3):92-94.
[11] 赖宇阳.Isight参数优化理论与实例详解[M].北京:北京航空航天大学出版社,2012.
Design of the Self-propelled Model for Submarine Maneuvering Ability Tests
LIU Yang, XIAO Chang-run, DU Pei-pei
(Dept. of Naval Architecture and Ocean Engineering, Naval University of Engineering, Wuhan 430033, China)
For the system arrangement problem in practical processing the self-propelled submarine model, a device is designed for measuring the weight center of gravity and moment of inertiat for a complex structure, and solving the problem of submarine since the model aircraft measurement of internal components. The Isight data optimization software is used to optimize the structure of internal component, providing accurate layout for internal components of self-propelled model. At the same time, the model of internal self regulating device is designed accordingly, eliminating the influence of the error of the tooling, so as to get more accurate position of the center of gravity and inertia moment, so that the self-propelled submarine model test can obtain accuratelly the maneuvering ability of the real submarine.
submarine self-propelled model; similarity criterion; weight center of gravity; moment of inertiat
10.3963/j.issn.1671-7953.2016.01.002
2015-07-30
2015-10-26
国家部委基金资助项目(51314010203)
刘洋(1990-),男,硕士生
U675.6
A
1671-7953(2016)01-0006-07
研究方向:船舶操纵性
E-mail:liu_yang1016@163.com