BP网络算法在平面运动测量误差补偿中的应用*
2016-09-14房立金
哈 乐, 房立金
(东北大学 机械工程与自动化学院, 沈阳 110819)
BP网络算法在平面运动测量误差补偿中的应用*
哈乐, 房立金
(东北大学 机械工程与自动化学院, 沈阳 110819)
在航天对接试验平台开发项目中,针对平面运动物体非接触高精度测量的难点,提出一种针对物体三自由度平面运动的创新性测量方法.利用激光测距传感器的并联组合,实现对物体位置和姿态的非接触式测量.以传感器测量值为输入样本,运用BP神经网络算法建立误差模型,通过调整权值因子使建立的网络模型能够拟合出测量误差,从而修正测量的数学模型.基于BP神经网络的误差补偿方法对平面运动物体测量误差的补偿具有明显的效果,能够满足位姿测量的精度要求.
并联测量; 激光测距; 非接触; 传感器; BP神经网络算法; 误差模型; 权值因子; 误差补偿
运动物体的位姿测量一般可分为接触式测量和非接触式测量两种[1].接触式测量原理简单,但由于两物体接触时产生相互摩擦,产生的干扰力会影响测量精度,另外接触式测量系统由于在测量过程中对物体施加了载荷,因而仅适用于静态位置测量.非接触式测量是以大地坐标为基准,利用光学等测量技术对目标物体进行测量.与接触式测量相比,其具有测量精度高、无干扰力、实时性强及自动化程度高等特点[2-6],因此,在高精度位置测量系统中,大多采用非接触式测量方法.
目前,非接触式测量方法主要包括线阵CCD测量方法、超声波测量方法、PSD位置测量方法及并联组合测量方法等,其中,并联组合测量方法采用空间并联闭链机构,利用相应的测量算法对物体的运动姿态进行测量,具有测量性能好、各向同性好、精度高及运动学反解简单的特点,广泛应用于机器人、精密机床、运动仿真设备等工业领域以及坐标测量、微操作、力测量等技术领域[7-8].
在航天对接试验平台开发项目中,需要精准地测量出模拟件相对于整个试验平台的位置和姿态,其中,模拟件的运动方式为平面运动,其运动可以分为沿试验平台的二维运动和绕自身中轴的转动.为准确测量其平面位置与姿态,设计一种利用激光测距传感器并联使用,通过组合测量与计算求解得到模拟件位姿信息的测量装置.由于系统对测量精度要求很高,从机理上消除误差难度很大,而测量误差建模补偿是一种简单快捷的解决方法.由于神经网络模型具有良好的逼近复杂非线性函数的能力[9-11],因此,本文提出一种利用BP神经网络模型拟合测量误差的方法,从而对测量模型的误差进行补偿.
1 测量原理
测量系统的结构示意图如图1所示,平面位姿测量装置由3个激光测距传感器、安装基座和被测对象组成.在安装支座上安装3个非接触式激光测距传感器,其中在X方向上安装2个,在Y方向上安装1个.测量基准板1和测量基准板2安装在被测物体上,分别与X和Y轴同向.传感器通过对所获测量数据的组合算法,实现对物体平面运动X、Y方向相对位移的测量及绕Z轴转动角度的测量.
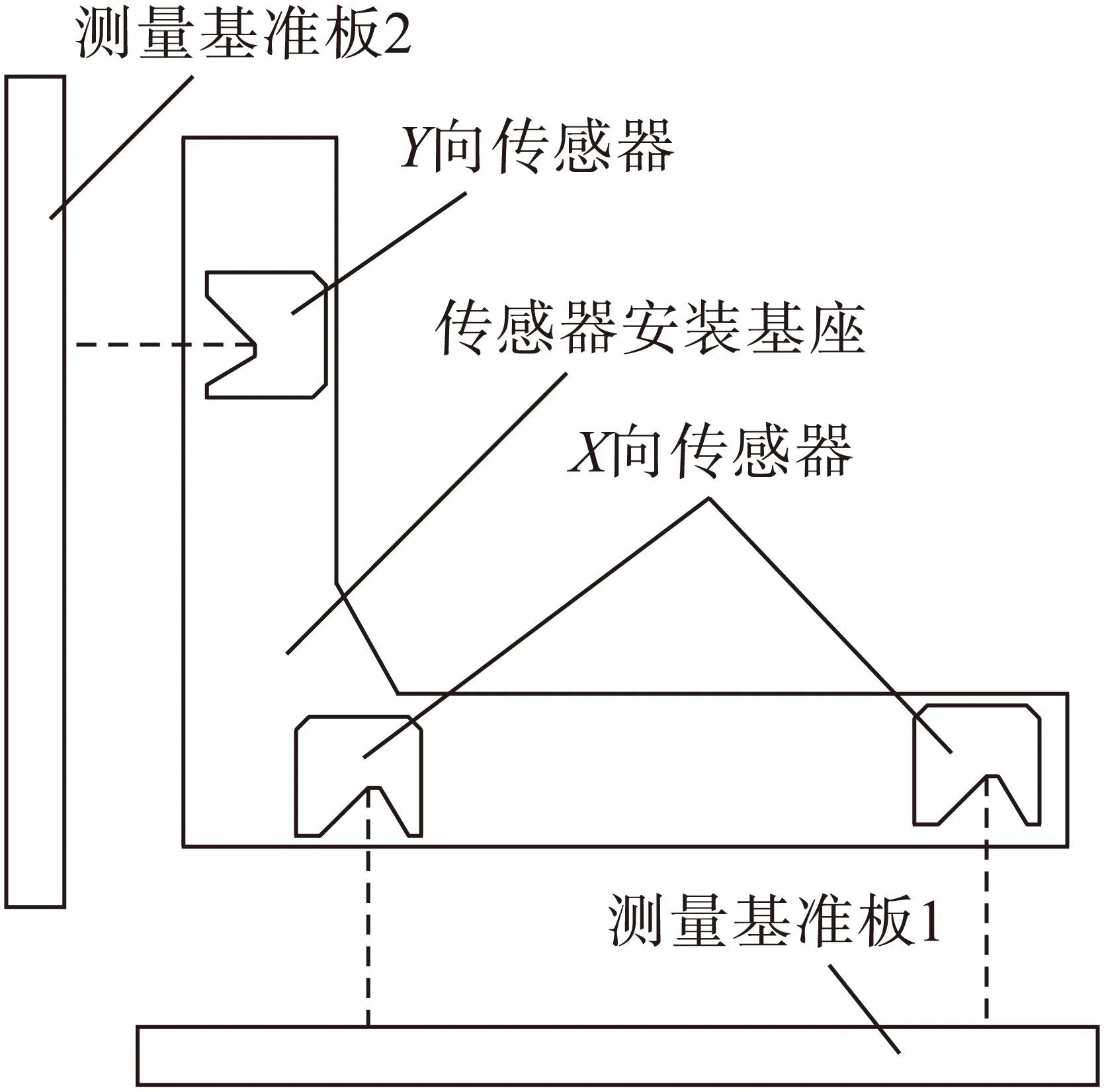
图1 测量系统的结构示意图
图2为测量系统坐标系示意图,X方向上两传感器在坐标系X轴上的测量点为a1(x1,0),a2(x2,0),Y向传感器在Y轴上的测量点为b(y1,0),点u、v、w分别为在某时刻3个激光传感器的位置点,点O1为被测物体中心点在地面的投影点,取3个传感器测量值分别为l1、l2、l3,则u、v、w的坐标分别为(x1,l1)、(x2,l2)、(y1,l3).根据3点坐标及O2O3⊥O2O4的关系可得O2O3,O2O4的直线方程为
(1)

(2)
解以上方程组得交点O2的坐标为

(3)
(4)
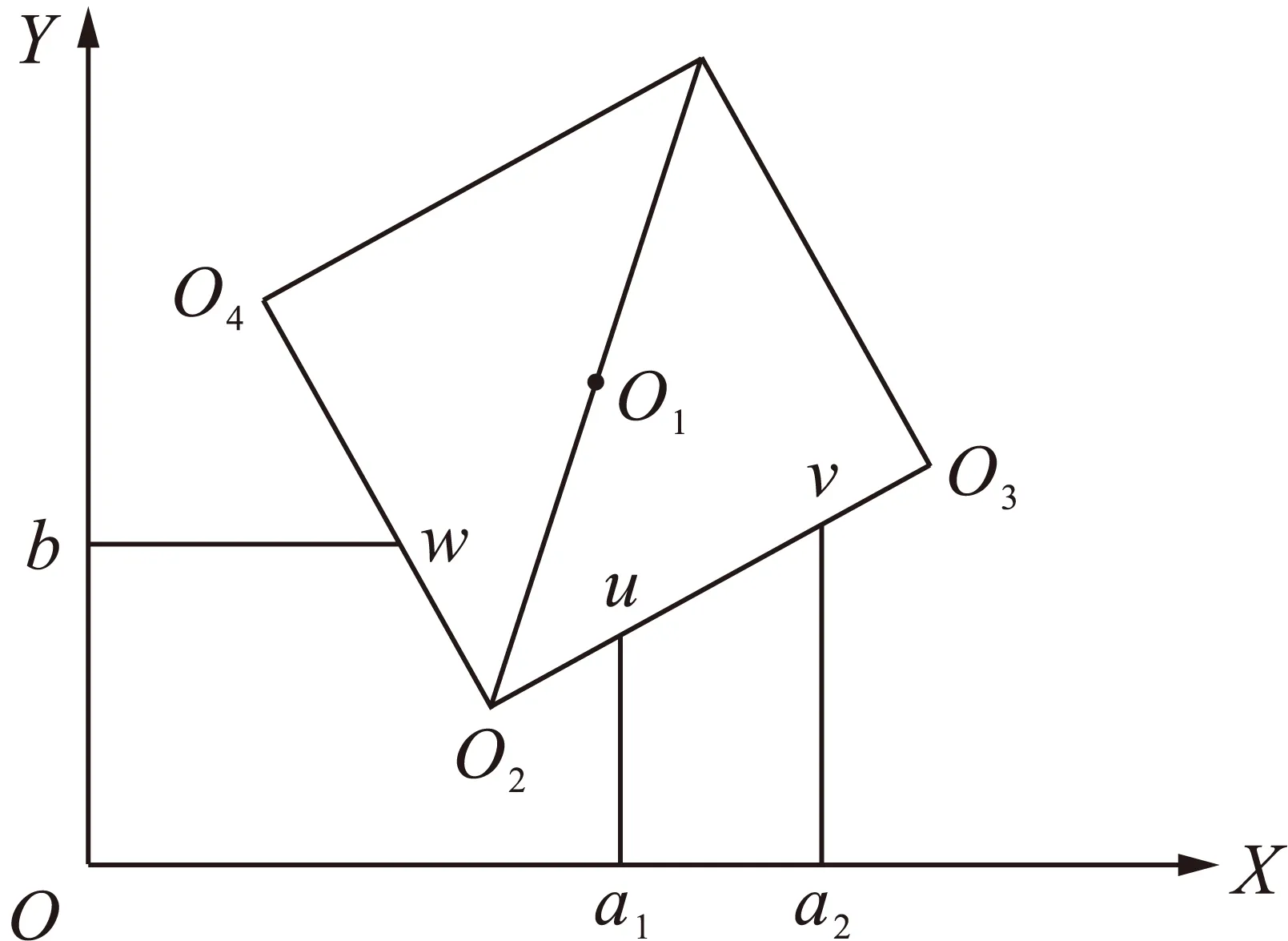
图2 测量系统坐标系示意图
由交点O2的坐标、交点O1、O2线段间的已知距离及直线O2O3与直线O2O4间的夹角可求得运动物体质心O1的坐标为
(5)
(6)
物体质心O1绕Z轴的转动角度θ为
(7)
2 BP网络补偿原理
在构建网络时,对于神经网络隐含层的个数并没有明确的规律规定和给定的公式,多个隐含层具有很好的训练精度,但需要较多的计算时间.根据已有理论[12]可知:具有偏差和至少一个S型隐含层加上一个线性输出层的网络可以逼近任何有理函数,即含有一个隐含层的3层BP网络能够实现非线性函数的逼近.本文选用具有一个输入层、一个隐藏层、一个输出层的3层BP神经网络,根据BP网络工作原理建立如图3所示的平面并联传感器的误差补偿模型.
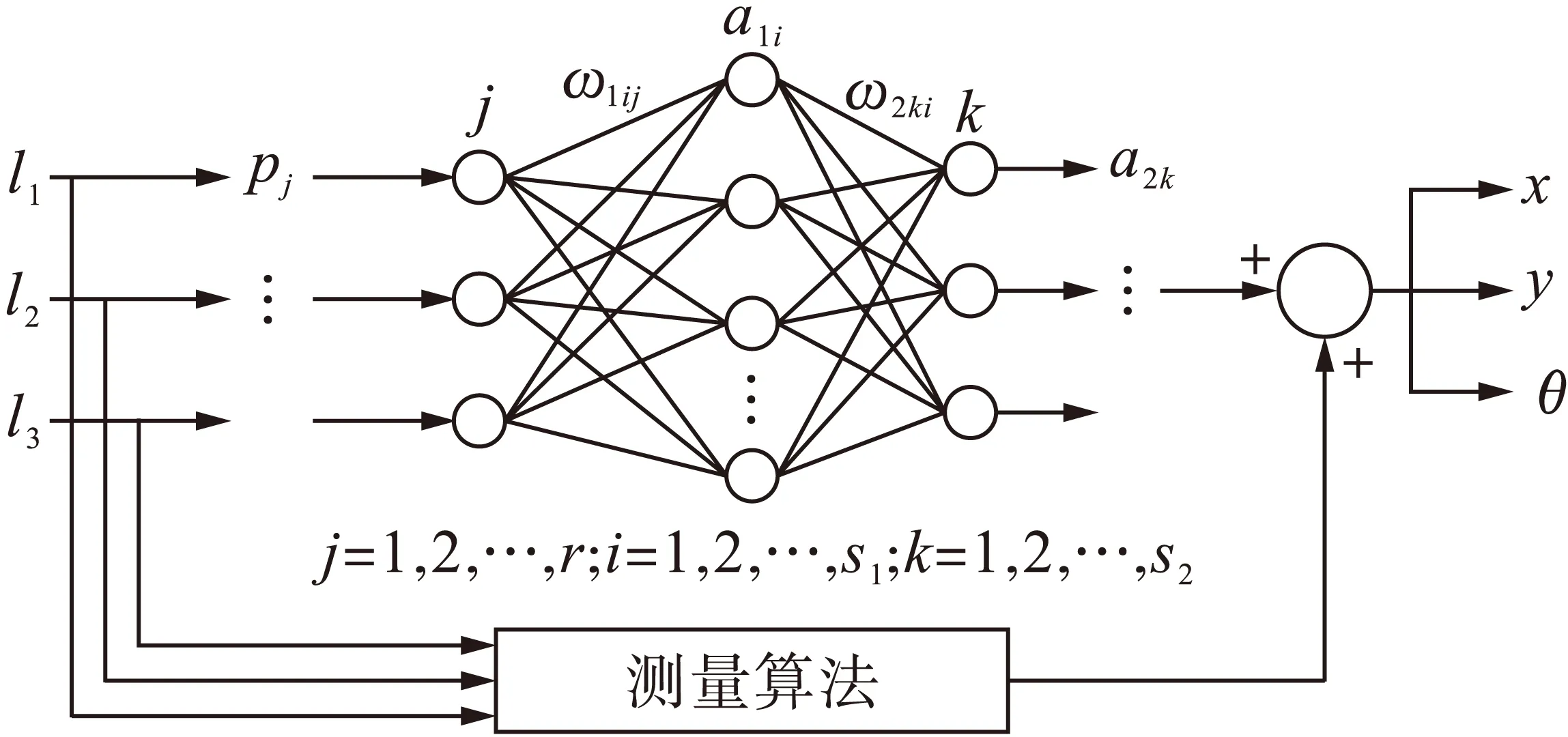
图3 基于BP网络的测量算法补偿模型
设输入为p,输入神经元有r个,隐含层内有s1个神经元,激活函数为f1,输出层内有s2个神经元,对应的激活函数为f2,输出为a,目标量为t.
隐含层中第i个神经元的输出为
(8)
输出层第k个神经元的输出为
(9)
定义误差函数为
(10)
式中,tk为目标输出.
调整权值因子的原则是使E变小,输出层和隐含层的权值变化分别为

(11)
(12)
式中,η为学习速率.
BP神经网络构建根据系统输入输出数据特点确定BP神经网络的结构,其中,确定输入层节点数时须考虑两个因素:精度和计算速度.节点数太多则对于系统的微小偏移比较敏感,太少则无法描述输入特征间的差异.由于系统中并联传感器的特征输入信号为激光测距传感器的测量值l1,l2,l3,即三维数组,该三维数组作为输入信号可以很好地描述输入特征,因此输入层节点数选为3.由于输出值为x,y,θ,因此输出层节点数也选为3.
为了避免各维数据间的数量级差别,减少因为输入输出数据数量级差别较大而造成的网络预测误差,当测量值lj的测量范围为[ljmin,ljmax]时,对BP网络的输入输出数据进行[-1,1]区间的线性归一化处理,即

(13)
(14)
3 试验及误差分析
3.1试验方法
根据上述测量原理,搭建的基于激光测距传感器的平面位姿测量平台如图4所示.
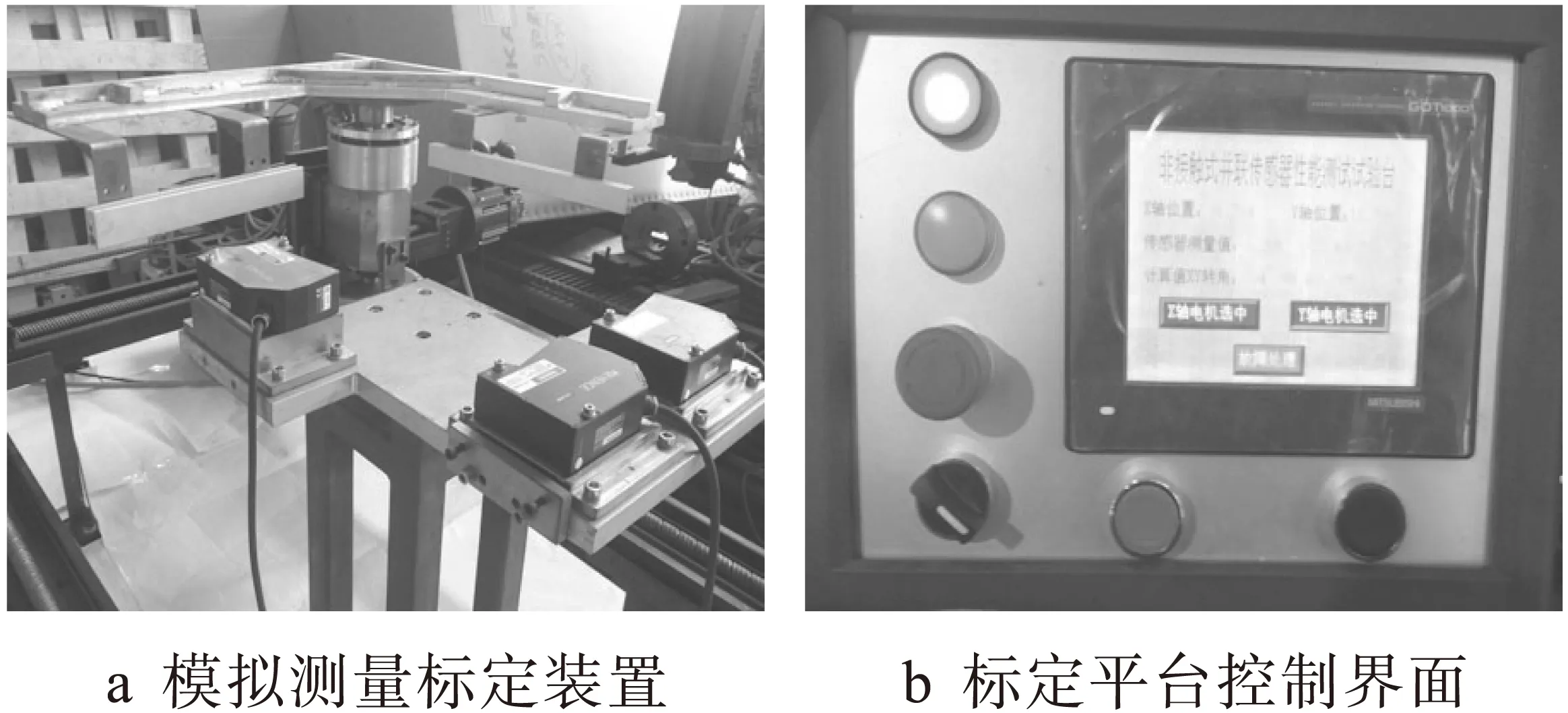
图4 模拟测量标定平台
该平台测距传感器选用日本KEYENCE LK-400激光测距传感器,X、Y向直线位移传感器采用MTS绝对式高精度磁尺,绕Z轴旋转角度采用英国Renishaw圆光栅进行测量.试验方法如下:
1) 为简化系统结构来验证运动测量方法的准确性,设计了能够模拟支撑架体运动的标定平台.激光测距传感器通过定位基准固定安装在架体上,X向测量基准板和Y向测量基准板安装在旋转支座上,该支座通过X,Y向伺服电机驱动导轨滑块的方式完成X,Y方向的运动,利用Z轴旋转电机完成Z向转动,从而模拟出运动物体的实际运动情况.
2) 通过手动控制按钮来改变各电机的运动状态,从而实现改变激光测量板的运动,每次运动后,分别记录光栅尺和圆光栅的测量读数作为被测物体的实际运动值.激光测距传感器的测量值l1、l2、l3按照组合测量算法经PLC运算后作为试验计算值,并将试验计算值与实际运动值进行对比,得到该系统的测量误差如表1所示.
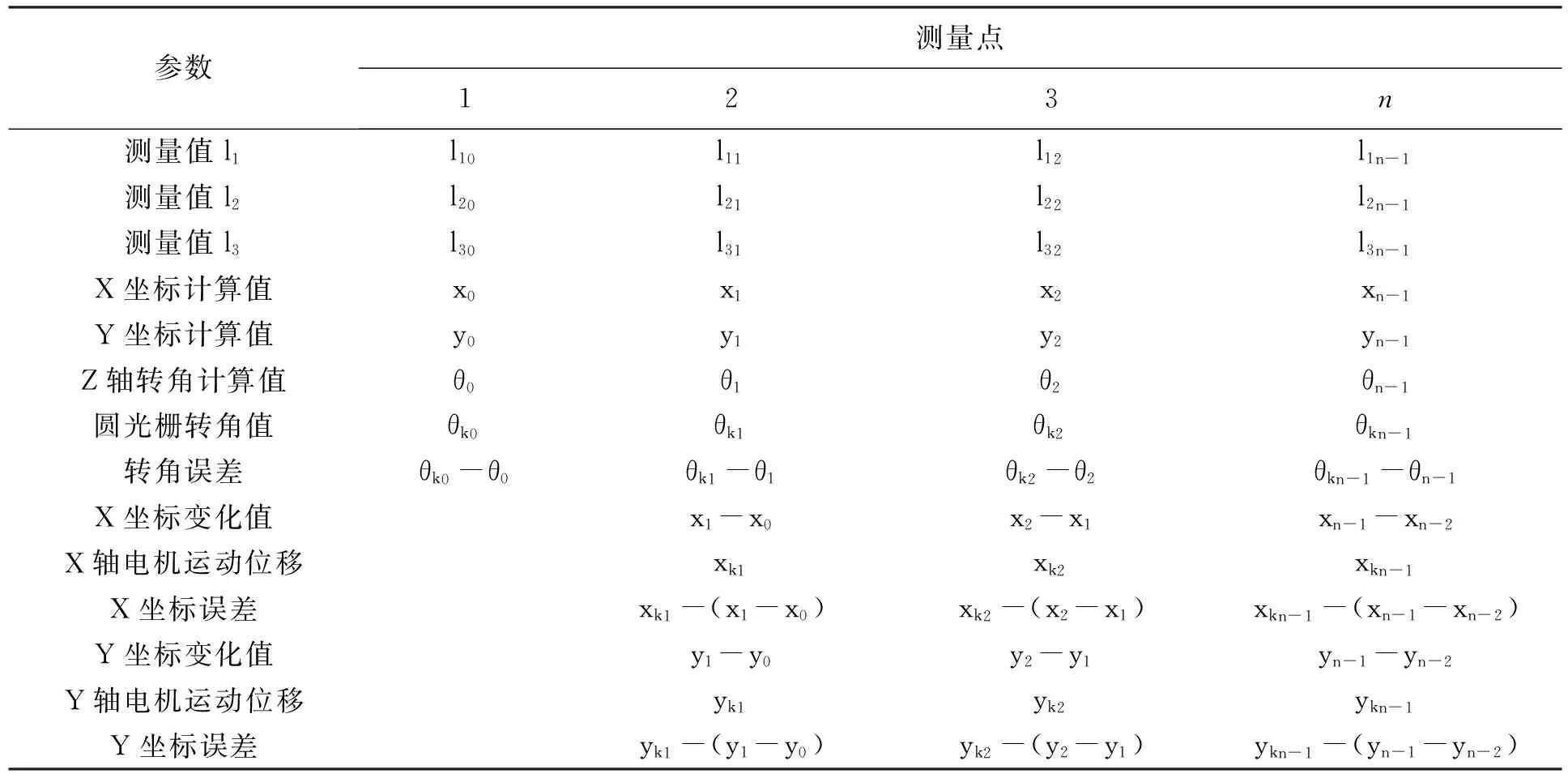
表1 系统的测量误差
3.2误差网络模型建立
隐含层从输入层提取特征,用神经网络实现映射,其节点数量严重影响着网络性能.隐含层节点数量减少,网络学习时间相对缩短,网络映射容量随之下降,导致网络权值调整无法达到全局最小,影响训练精度.若数量增多,网络学习能力增强,但所需的学习时间也会相对增长,网络所需容量也随之增多.不同隐含层节点数的网络性能如图5所示.
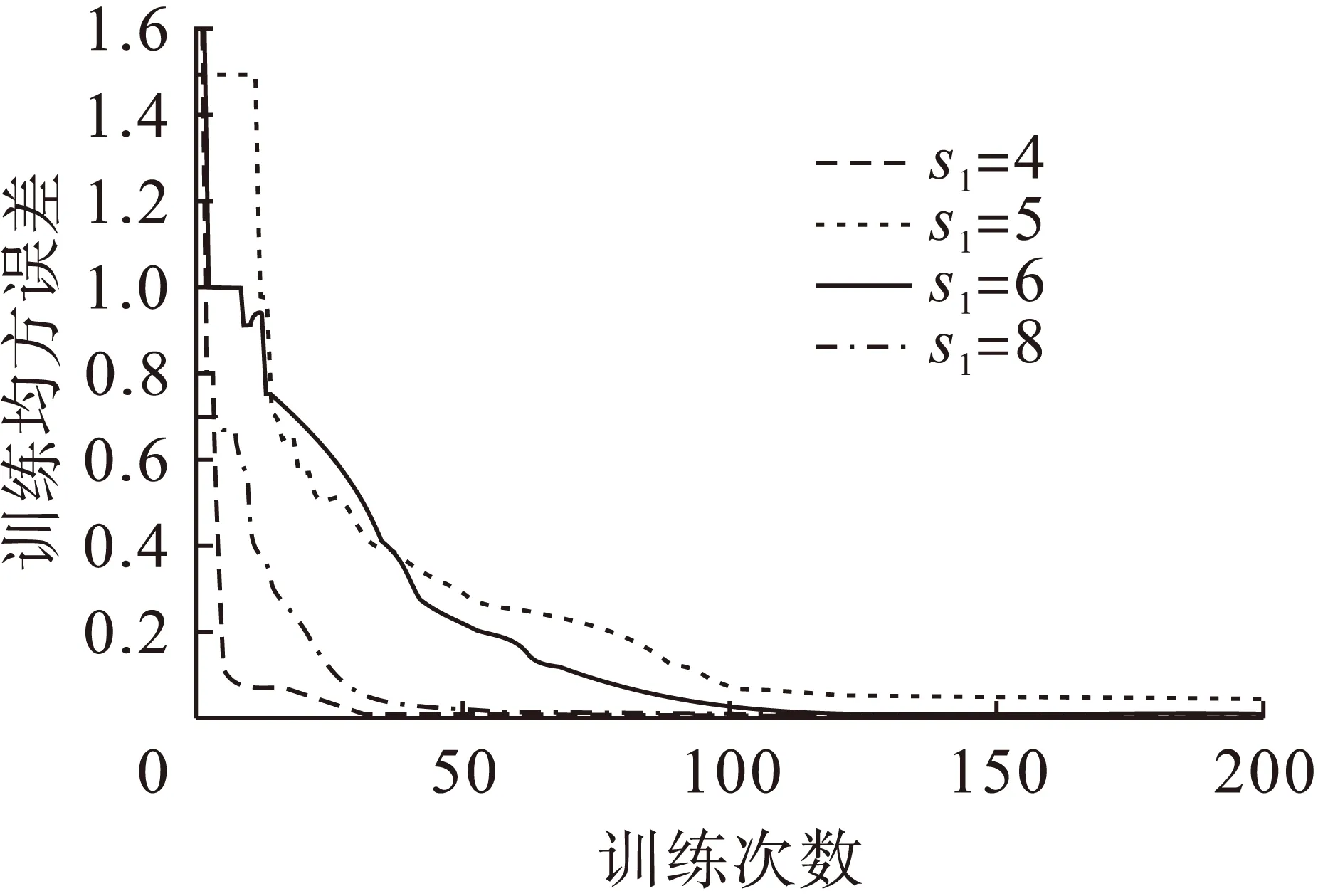
图5 不同隐含层节点数的网络性能
隐藏层节点数的确定采用控制变量法,对相同输入、训练次数、误差指标及学习速率下的拟合误差进行比较.试验中,初始训练次数为1 500,训练误差性能指标(MES)为0.000 1,学习速率为0.02.当隐藏神经元个数为6时,均方差达到极点并收敛到3.473 1×10-4,满足平面并联传感器的测量要求;当s1=4或5时,误差处于下降趋势且不能满足测量精度要求;当s1=8时,均方差为4.065×10-4,BP网络变得复杂而且性能未得到改善;为了达到最佳的训练效果且避免网络训练过度,令s1=6.
3.3测量误差补偿效果
将通过BP网络对输入的误差补偿与试验计算值进行叠加,并与实际运动值进行对比,即可得到误差的补偿效果.为验证误差补偿的有效性,采用表1的测量误差数据作为测试数据,通过BP网络补偿后的航天器平面运动轨迹和误差分布如图6~9所示.
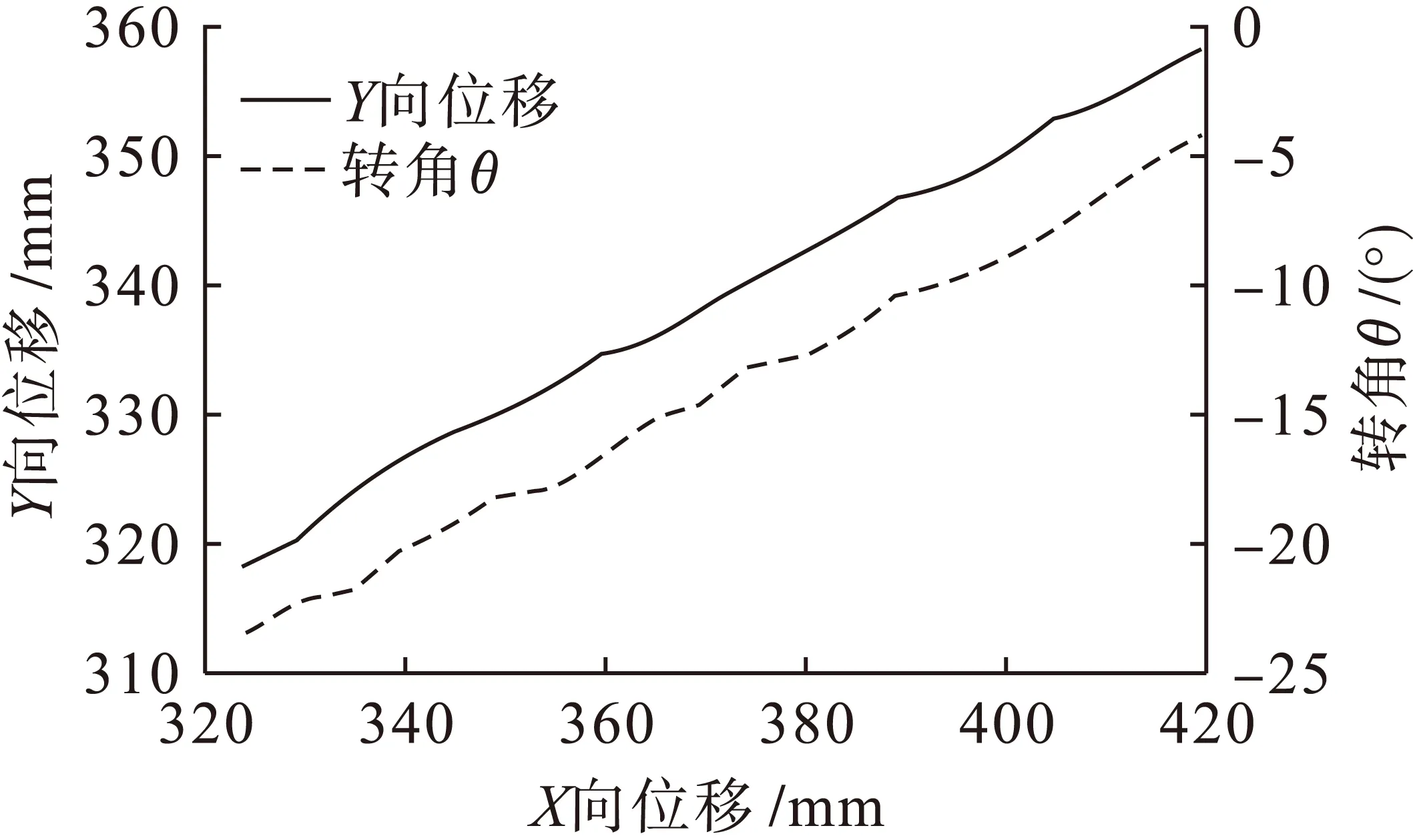
图6 补偿后航天器平面运动轨迹
由图6~9可以看出:经过BP网络误差补偿后,X方向最大位移误差由0.048 mm降低到0.012 mm,Y方向最大位移误差由0.039 mm降低到0.015 mm,最大转角误差由0.006 2°降低到0.001 8°.X向平移误差下降了75%,Y向平移误差下降了61%,转角测量误差下降了77%.
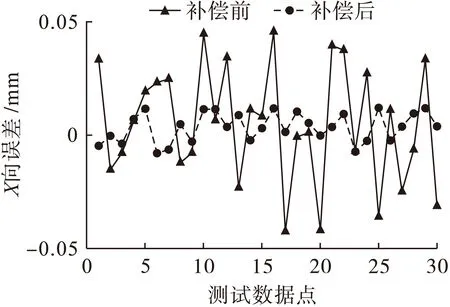
图7 补偿前后X向误差曲线

图8 补偿前后Y向误差曲线
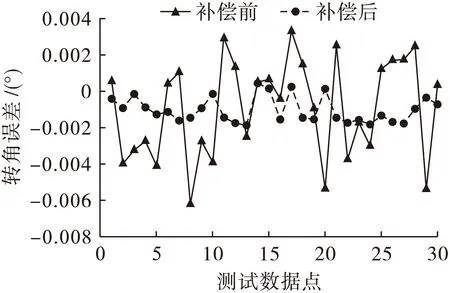
图9 补偿前后转角误差曲线
4 结 论
针对平面运动物体高精度测量的难点,提出一种利用非接触式并联传感器组合测量算法实现对物体位姿测量的方法.利用BP神经网络算法确定了误差模型的工作参数,通过调整权值因子拟合测量误差,实现了测量系统的误差补偿.试验结果表明,优化后的测量结果能够更好地满足测量要求,验证了误差补偿方法具有很好的准确性和应用性.
[1]王洋,颜昌翔,胡春晖,等.非接触式扫描反射镜转角测量系统 [J].光学精密工程,2014,22(4):850-855.
(WANG Yang,YAN Chang-xiang,HU Chun-hui,et al.Non-contact rotation angle measurement system for scanning mirrors [J].Optics and Precision Engineering,2014,22(4):850-855.)
[2]Clark D C,Kim M K.Noncontact single-pulse optical method to measure interfacial properties in intact systems [J].Optics Letters,2012,37(24):5145-5147.
[3]Jian S.Target positioning of picking robot fusing laser ranging and vision [J].Green Communications and Networks,2012(113):985-993.
[4]Li X D,Zhao H J,Liu Y,et al.Laser scanning based three dimensional measurement of vegetation canopy structure [J].Optics and Lasers in Engineering,2014(54):152-158.
[5]段振云,蒋卫卫,赵文辉,等.波纹管焊缝跟踪检测技术 [J].沈阳工业大学学报,2011,33(2):148-152.
(DUAN Zhen-yun,JIANG Wei-wei,ZHAO Wen-hui,et al.Tracking measurement technology for welding seam of bellows [J].Journal of Shenyang University of Technology,2011,33(2):148-152.)
[6]王新国,李家垒,许化龙,等.光纤陀螺温度和标度因数非线性误差建模研究 [J].系统仿真学报,2007,19(9):1922-1924.
(WANG Xin-guo,LI Jia-lei,XU Hua-long,et al.Research of FOG’s error modeling based on temperature and scale factor nonlinearity [J].Journal of System Simulation,2007,19(9):1922-1924.)
[7]Zhang D B,Hu D W,Shen L C,et al.Design of an artificial bionic neural network to control fish-robot’s locomotion [J].Neurocomputing,2008,71(4):648-654.
[8]Mounir B N,Mohamed C.Neural network control of nonlinear dynamic systems using hybrid algorithm [J].Applied Soft Computing,2014(24):423-431.
[9]Ma D Y,Liang Y C,Zhao X S,et al.Multi-BP expert system for fault diagnosis of power system [J].Engineering Applications of Artificial Intelligence,2013,26(3):937-944.
[10]杨理践,沈博,高松巍,等.基于组合导航技术的管道地理坐标定位算法 [J].沈阳工业大学学报,2014,36(1):66-71.
(YANG Li-jian,SHEN Bo,GAO Song-wei,et al.Geographical position locating algorithm for pipeline based on integrated navigation technique [J].Journal of Shenyang University of Technology,2014,36(1):66-71.)
[11]Qiu Z C,Zhang X T,Ye C D.Vibration suppression of a flexible piezoelectric beam using BP neutral network controller [J].Acta Mechanica Solida Sinica,2012,25(4):417-428.
[12]黄铭,刘俊.海堤渗压神经网络分布模型的建立及规律分析 [J].上海交通大学学报,2014,48(11):1655-1659.
(HUANG Ming,LIU Jun.Establishment and analysis of artificial neural network distributed model for sea wall osmosis pressure [J].Journal of Shanghai Jiao-tong University,2014,48(11):1655-1659.)
(责任编辑:景勇英文审校:尹淑英)
Application of BP network algorithm in error compensation of planar motion measurement
HA Le, FANG Li-jin
(School of Mechanical Engineering and Automation, Northeastern University, Shenyang 110819, China)
In the development project of space docking test platform, an innovative measurement method for the planar movement of object with three degrees of freedom was proposed aiming at the difficulties in the non-contact high-precision measurement of object in planar movement. With the parallel combination of laser ranging sensors, the non-contact measurement for the position and posture of object could be realized. Through taking the measured values of the sensors as the input sample, the error model was established with BP neutral network algorithm. Through adjusting the weight factor, the network model could fit the measurement error. Thereby, the mathematical model for measurement could be corrected. The results verify that the error compensation method based on BP neural network has a significant effect on the compensation of measurement error for the object in planar motion and can meet the accuracy requirements in position and posture measurement.
parallel measurement; laser ranging; non-contact; sensor; BP neural network algorithm; error model; weight factor; error compensation
2015-01-04.
国家重点基础研究发展计划项目(2013CB733100).
哈乐(1986-),男,辽宁沈阳人,博士生,主要从事空间全物理仿真及机器人智能控制等方面的研究.
10.7688/j.issn.1000-1646.2016.01.15
TP 212
A
1000-1646(2016)01-0086-05
*本文已于2015-12-07 16∶18在中国知网优先数字出版. 网络出版地址: http:∥www.cnki.net/kcms/detail/21.1189.T.20151207.1618.026.html