Multi-objective Optimization Design of Vented Cylindrical Airbag Cushioning System for Unmanned Aerial Vehicle
2016-09-14ShaoZhijianHeChengPeiJinhua
Shao Zhijian,He Cheng,Pei Jinhua
Research Institute of Pilotless Aircraft,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China(Received 23October 2014;revised 25February 2015;accepted 3March 2015)
Multi-objective Optimization Design of Vented Cylindrical Airbag Cushioning System for Unmanned Aerial Vehicle
Shao Zhijian,He Cheng*,Pei Jinhua
Research Institute of Pilotless Aircraft,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China
(Received 23October 2014;revised 25February 2015;accepted 3March 2015)
Multi-objective optimization design of the gas-filled bag cushion landing system is investigated.Firstly,the landing process of airbag is decomposed into a adiabatic compression and a release of landing shock energy,and the differential equation of cylindrical gas-filled bag is presented from a theoretical perspective based on the ideal gas state equation and dynamic equation.Then,the effects of exhaust areas and blasting pressure on buffer characteristics are studied,taking those parameters as design variable for the multiobjective optimization problem,and the solution can be determined by comparing Pareto set,which is gained by NSGA-Ⅱ.Finally,the feasibility of the design scheme is verified by experimental results of the ground test.
airbag;vent orifice;soft landing;multi-objective optimization;unmanned aerial vehicle(UAV)
0 Introduction
Parachute-airbag landing is an undamaged recovery method that is commonly used with modern unmanned aerial vehicles(UAVs),manned spacecraft,and heavy cargo airdrops.A parachute′s deceleration is limited because the landing speed of a decelerated UAV cannot be too low;if it is,the weight of the parachute system becomes unreasonable.For instance,the recoverable modules of UAVs and manned spacecraft normally have ground landing speeds between 6m/s and 7m/s after parachute deceleration.Therefore,light and foldable airbags with superior cushioning performance are normally used to cushion the vehicles′landings.
Because they are effective cushions,after many years of development,airbag cushions with a variety of structures and forms are yielded. Based on cushioning mechanisms,current configurations include enclosed and vented airbags.The enclosed airbags have two maijor advantages. They are not sensitive to the orientation of the payload on landing,and they have a history of use in many applications.However,the multiple impacts and unknow lander orientation during bounces complicates the design.On the other hand,as the final attitude is unpredicatable lander righting is required,increasing system mass and complexity.Vented airbags,due to its deterministic impact load direction,can be deployed with a more targeted arrangement.A properly designed airbag with a suitable size and vent hole dimension can keep the overload within the allowed range,control the recovery object′s final touchdown speed,and prevent bouncing.In view of these advantages,a large number of UAVs and spacecraft are presently recovered by means of vented airbag systems.In the manned spacecraft″Orion″developed by NASA(National Aeronautics and Space Administration)for the Constellation Program[1],six vented airbags cushioning systems were deployed.During the landing process,the externally vented airbag acts as decelerator,and the internally enclosed airbag drops up the spacecraft and prevents it from touching the ground.The U.S.Army′s Natick research center designed a mechanical vent control mechanism for the cushioning airbags used in heavy airdrops,which could adjust the vent area during cushioning to smooth variations in the airbag′s pressure[2,3].In addition,vented airbags were heavily used in the delivery of combat weapons and relief supplies[4-7].In China,relevant research institutions studies this type of airbag.A magnetostrictive actuator was employed to drive vent valves and implement proactive control of vent holes during the cushioning process[8].Shao[9]designed a vented airbag system with a secondary airbag that leveraged gas is recycled to improve the cushioning performance of airbag systems.Chen et al.[10]investigated the pros and cons of airbags with fixed and controllable vents using a theoretical model.Current studies show that,despite all the advantages of airbags with controllable vents,this type of airbag requires a mechanical driver and a control system to complete feedback and perform an action within tens of milliseconds,which proves to be quite challenging with the technology currently available in China.In addition,in China,studies of vented airbag cushioning systems generally remain in the stage of theoretical analysis and simulations,and there are few studies available to guide actual engineering projects.
In this paper,a cushioned recovery problem for a type of UAV is investigated.Based on a theoretical model and the NSGA-Ⅱalgorithm,a multi-objective method of optimizing design for a horizontal cylindrical vented cushioning airbag is proposed.The cushioning process is divided into an adiabatic compression stage and a venting and energy release stage.Piecewise non-linear differential equations for the horizontal cylindrical vented airbag are established.The relationship between the airbag′s design parameters and cushioning performance is conducted.A multi-objective(Optimize both the area of the vent hole and the crack pressure)design method is proposed for this type of airbag.Finally,the accuracy of the design is verified experimentally.
1 Basic Dynamical Equations of Cylindrical Vented Airbag System
A certain mass of an ideal gas inside a cylindrical vented airbag satisfies the following state equation

whereρis the density of the gas,ethe specific internal energy of gas,andγthe gamma constant. The specific internal energy represents the internal energy of one mass unit of the gas.Using the ideal gas law,this parameter can be represented using the gas′s initial specific internal energy.
It is assumed that the recovery object with mass is in the upper part of the airbag.For simplicity the connections between the recovery object and the airbag will not be included in the representation of the system for the simulation,instead the degrees of freedom of system will be restricted to prevent rotation or movement not in the vertical direction.Upward is defined as the positive direction of the recovery object′s displacement.The balanced position is defined as the initial position,the external pressure is Pe.The airbag deflation geometry is idealised as the double truncation of a cylinder.If the landing craft plate moves 10cm after the bag initially comes into contact with ground,5cm both of the top and the sphere bottom is cut off and the cylinder is compressed without deformation of the rest(See Fig.1).This means that the volume of the airbag is now that of full cylinder minus that of the compressed domes at the top and bottom.This method neglects the reality that a cylindrical bag does not deform in this idealised fashion.More realistically the bag deforms with a more expanded midsection,similar to a donut without the centre removed.In addition,because the stiffness of the airbag′s fabric is significantly less than the supportprovided by the gas,the effect of the airbag fabric′s stiffnes can be ignored.Then,based on Newton′s second law of motion,the equation of motion for the recovery object is as follows

Fig.1 Deformation in cross section of airbag

where Sis the interaction area of the recovery object and the airbag.For a horizontal cylindrical airbag with length L,the interaction area Sis

whereΔu is the initially generated compression when the object is in its balanced position.Assuming that the airbag′s initial volume is V0and its initial pressure is P0,the initial interaction ar-ea isIt is worth noting that all of the initial conditions can be calculated from the balanced condition,the state equation of the gas,and the geometrical relationships.If the gas has an initial density ofρ0,the initial mass of the gas is

The initial specific internal energy of the gas is

Because at any moment during the recovery process the volume of the cylindrical airbag is approximately V=V0+u(S+S0)(6)the density of the gas inside the airbag is

According to the law of conservation of energy,before vent occuring,the total energy of the recovery object/airbag system is conserved.Therefore,the recovery object′s mechanical energy and the internal energy of the gas convert into each other.Assuming that the recovery object′s initial position has zero potential energy,its mechanical energy at the present moment is

Initially,the mechanical energy of the recovery object is

The law of conservation of energy can be used to calculate the total internal energy of the gas inside the cylinder at the present moment as follows

where˜E0is gas′s initial total internal energy,which is determined by combining Eq.(4)and Eq.(5)to obtain

From Eqs.(10),(11),the gas′s specific internal energy at the present moment can be obtained,namely

Next,the airbag′s internal pressure at the present moment can be obtained from Eq.(1),namely
Note that ma=ρ0V0=ρV,Eq.(13)can be rewritten as

Substituting Eq.(14)into Eq.(2)yields the differential equation that describes the dynamics of the airbag recovery system before vent
Eqs.(3),(6),(15)can be grouped to form a system of simultaneous differential equations for this non-linear problem.With the initial conditions u(0)=0andu(0)=v0,the response of the center can be calculated using the different method.
As the compression process proceeds,the airbag is in the venting phase when the internal pressure of the airbag reaches the burst pressure Pcr.At that moment,Eq.(20)is still valid.To facilitate explanation,the balance equation for this phase is

where″ex″denotes a gas state parameter in thevent phase.According to Ref.[11],the venting rate of a vent hole is related to the difference between the internal and external pressures,the area of the vent hole Aex,and the retention coefficient K.The venting rate is

Assuming that during venting,the temperature of the gas inside the airbag is fixed and″cr″denotes the gas state at the moment of cracking,the gas inside the airbag satisfies
Pex(Vcr+uex(S+Scr)=maRTcr(18)In addition,since
ma=ρ0V0-q(19)
and the initial conditions are uex(0)=ucr,uex(0)=ucr,and q(0)=0,Eqs.(3),(16)—(19)can be grouped to calculate the response of recovery object and the patterns of variations in the airbag parameters during the venting stage.
2 Optimizing Multiple Objectives in Design of Vented Airbag System for UAV
2.1 Discussion on characteristics of exhaust airbag
The design of an airbag recovery system for a UAV in a standard environment is used as an example to investigate the cushioning performance of a vented airbag.Mass of the UAV system is 250 kg.The vertical ground landing speed is 5.4m/s. During the gas injection process,the nitrogen cylinder system carries in the body of the vehicle injects air,and the stable operational pressure is equal to the environmental pressure,i.e.,p0=pe. To facilitate the design,based on previous recovery experiences,the airbag is designed as a cylinder 800mm long and 600mm in diameter.
Previous studies show that proper real-time control of the vent hole′s area can cause UAV to perform a″zero speed″landing.However,because it is constrained by the development of sensor and control mechanisms in China,actual control of the vent hole′s area is unable to satisfy the theoretical requirements of the ultrashort venting period,and there is a significant delay.Therefore,most of the vent airbags still use fixed vent holes.Fig.2shows the maximum overload and touchdown speed within the vented airbag during impact attenuation.The graph shows as follows:
(1)When the area of the vent hole is fixed,none of the following parameters exhibits variation with a linear trend:the UAV′s maximum overload,its touchdown speed,and its crack pressure.
(2)When the crack pressure is fixed,the UAV′s maximum overload decreases as the area of the vent hole increases.After the area exceeds a certain threshold,the maximum overload does not change.In contrast,the touchdown speed gradually increases.
(3)When the area of the vent hole exceeds a certain threshold,the UAV′s maximum overload does not change.However,at that moment,the touchdown speed continues to increase.
The above analysis shows that an oversized vent hole is likely to result in an accelerated vent speed and relatively fast cushion stroke height as UAV descends.Therefore,the amount of energy lost per unit mass of gas is reduced,which definitely requires increasing the airbag′s height. When the area of its base is fixed,the discordance between the height and the area of the base reduces the airbag′s stability and reliability,thereby complicating the control rule.In contrast,an undersized vent hole significantly increases the overload level.Therefore,aproper design is necessary to coordinate the relationship between the overload and the touchdown speed.In the following sections,both of these parameters are used as objective functions in the multi-objective optimization process.
2.2 Multi-objective optimization design
The vent hole area coefficient cexand the crack pressure Pcrare optimization parameters. The initial area(the aperture is 120mm)and the area coefficient are multiplied to determine the area of the vent hole.A mathematical model of the multi-objective optimization problem whose objec-tive functions are the maximum overload amaxand the final touchdown speed vfinis

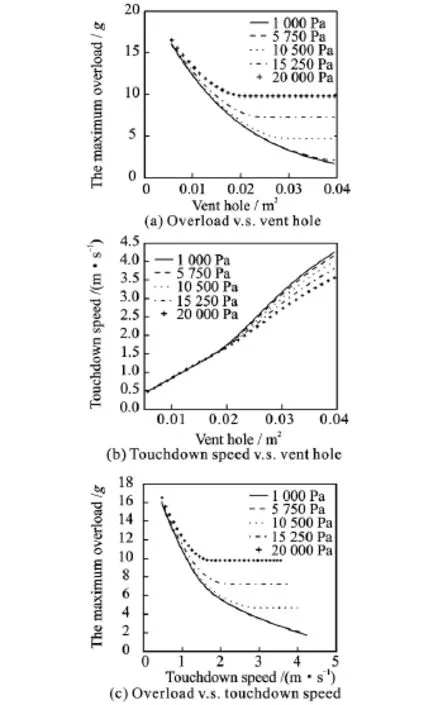
Fig.2 Change of cushioning properties with airbag parameters
where the superscripts U and L denote the lower and upper limits,respectively,of the design variables.

The Pareto front(See Fig.3),[cex,Pcr]l(l= 1,2,…,NP),can be obtained for multi-objective optimization problem by NSGA-Ⅱ,where NPis the number of Pareto optimal solutions.Every objective(Ji([cex,Pcr]l),i=1,2,…,Nobj)is normalized with respect to its minimum and maximum values(Jmaxiand Jmini)on the Pareto front approximation,¯Ji([cex,Pcr]l),i=1,2,…,NobjObviously,ifthat meansis the optimal solution of the i th objective function on the Pareto front.Otherwise,that means is the worst solu-tion.The 2-norm values of all of the solutions in the optimal solution set are compared,and the solution with the smallest distance from the ideal optimal solution is chosen as the final identified result.The results are listed in Table 1.
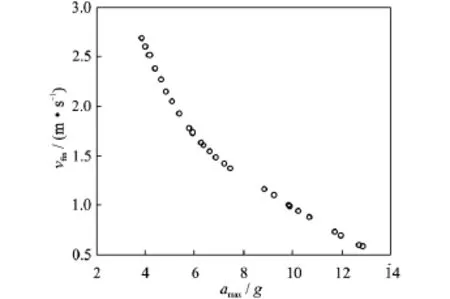
Fig.3 Pareto optimal solutions

Table1 Final optimal solution
3 Experiment on UAV Airbag System
To verify the accuracy of the optimized design of the airbag system,a relevant study involving an airbag drop test is conducted.The test is conducted in the drop testbed of the Launch and Recovery Technology Laboratory,UAV Research Institute,Nanjing University of Aeronautics and Astronautics.The test article and the airbag are lifted to a height that allows them to reach a parachute landing speed in free fall.After being released,the test article drops to the ground platform.Impact sensors under the platform record and export the impact signals,which are recorded by the data collection system.At the same time,data on the vehicle body′s acceleration are recorded,and the vehicle body′s touchdown speed is recorded using a high-speed photographic system. The overall testbed is shown in Fig.4.
Fig.5show the velocity and overload curves(The filter frequency is 50Hz)for the center ofgravity of the vehicle body,which is collected during the test.A comparison resulted from the theoretical model shows that the peak value and pulse width from the theoretical model match the test results well.In addition,the touchdown speed obtained using the high-speed photographic system is approximately 1.1m/s,which is basically consistent with the theoretically calculated result.

Fig.4 Impact test for UAV airbag system

Fig.5 Comparison of test and simulation results
4 Conclusions
In this paper,a theoretical model of a horizontal cylindrical vented airbag is developed based on the state equations of internal gases and the law of conservation of energy of the system,and a numerical algorithm is used to analyze the effect of the airbag system′s parameters on its cushioning performance.The touchdown speed and the maximum overload serve as objective functions in a multi-objective optimization process for the cylindrical vented airbag system.Based on the design requirements and screen criteria,a final design is identified.Finally,the feasibility of the proposal is verified experimentally.The design method proposed in this paper is a valuable trial for various systems that use vented airbags for recovery,and it has practical value in engineering applications.The design approach is universal and can be directly applied to recovery design in other space and aviation systems.
References:
[1] SMITH T R,WAER J S,WILLEY C E,et al.Orion CEV earth landing impact attenuating airbags-design challenges and application[C]∥Proc of 28th IEEE Aerospace Conference.Montana,USA:IEEE AC Paper,2007.
[2] LEE C K.Methods for improved airbag performance for airdrop:Technical Report 11-atick/TR-93/002[R].[S.l.]:L.S.Army Natick Reseach,Development and Engineering Center,1992.
[3] LEE C,ROSATO N,LAI F.An investigation of improved airbag performance by vent control and gas injection[C]∥11th AIAA Aerodynamic Decelerator Systems Technology Conference.San Diego,CA:AIAA,1991:455-464.
[4] TAYLOR A P.Investigation of the application of airbag technology to provide a soft-landing capability for military heavy airdrop[C]∥16th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar.Boston,MA:AIAA,2001:284-292.
[5] WARRICK J C,LEE C K.Advanced airbag system for cargo airdrop[C]∥16th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar.Boston,MA:AIAA,2001:293-303.
[6] DREHER P,CANFIELD R,MAPLE R.Dynamic response of a monition to a low pressure airbag[C]∥46th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics &Materials Conference.Austin,Texas:AIAA,2005,2031:1-11.
[7] DREHER P,CANFIELD R,MAPLE R.Experi-mental dynamic response of a solid object to various diameter low pressure airbags[C]∥47th AIAA/ ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.Newport,Rhode Island:AIAA,2006:1-7.
[8] GE Sicheng,CHEN Fei.Experimental study on theory of impact active control of intelligent airbag[J]. Journal of Astronautics,2004,25(6):600-603.(in Chinese)
[9] SHAO Zhijian.Application of second-airbag to unmanned aerial vehicle[J].Journal of Nanjing University of Aeronautics and Astronautics,2009,41(S):93-96.(in Chinese)
[10]CHEN Shuai,LI Bin,WEN Jinpeng,et al.Cushioning characteristic and parameter design of a soft landing airbag[J].Journal of Vibration and Shock,2009,28(4):25-30.(in Chinese)
[11]ESGAR J B,MORGAN W C.Analytical study of soft landings on gas-filled bags:NASA TR R-75[R]. 1975.
[12]BLASCO X,HERRERO J M,SANCHIS J,et al.A new graphical visualization of n-dimensional Pareto front for decision making in multiobjective optimization[J].Information Sciences,2008,178(20):3908-3924.
Mr.Shao Zhijianis an assistant professor in Research Institute of Pilotless Aircraft,Nanjing University of Aeronautics and Astronautics.He received his B.S.degree in Nanjing University of Aeronautics and Astronautics.His research interests are emission and recovery for pilotless aircraft.
Dr.He Chengis an assistant professor in Research Institute of Pilotless Aircraft,Nanjing University of Aeronautics and Astronautics.He received his Ph.D.degree in Nanjing University of Aeronautics and Astronautics.His research interests are emission and recovery for pilotless aircraft.
Mr.Pei Jinhuais a professor in Research Institute of Pilotless Aircraft,Nanjing University of Aeronautics and Astronautics.He received his M.S.degree in Nanjing University of Science and Technology.His research interests are emission and recovery for pilotless aircraft.
(Executive Editor:Xu Chengting)
V224.1 Document code:A Article ID:1005-1120(2016)02-0208-07
*Corresponding author,E-mail address:hechengary@163.com.
How to cite this article:Shao Zhijian,He Cheng,Pei Jinhua.Multi-objective optimization design of vented cylindrical airbag cushioning system for unmanned aerial vehicle[J].Trans.Nanjing Univ.Aero.Astro.,2016,33(2):208-214.
http://dx.doi.org/10.16356/j.1005-1120.2016.02.208
杂志排行

Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Jet Noise Reduction of Double-Mixing Exhaust System
- Grey Incidence Analysis Applied to Civil Aircraft Customization Process
- Gas Flow Development Through Tandem Heat Exchangers Inside Exhaust Nozzle by Using Porous Medium Model
- Heat Transfer Coefficient of Film Cooling with Ellipse-Shaped Tab
- Optimal Control of Reinforced Plate Based on the Minimum Energy
- Numerical Analysis of Refueling Drogue Oscillation During Refueling Docking