信息引导条件下雷达搜索空域及策略
2016-09-12唐书娟许蕴山毕笃彦
唐书娟,许蕴山,毕笃彦,杨 涛
(空军工程大学航空航天工程学院,陕西西安 710038)
信息引导条件下雷达搜索空域及策略
唐书娟,许蕴山,毕笃彦,杨 涛
(空军工程大学航空航天工程学院,陕西西安 710038)
为使雷达在信息引导条件下快速准确地完成目标搜索,建立了指示引导模型,依据置信度、时效性和误交接概率划分初始搜索空域;在动态检测模型的基础上,以获得最大全局信息增益为准则实现了搜索波位的动态编排.仿真结果表明,即使在较大引导误差条件下,雷达依然能够迅速、准确地捕获目标,提高了无源传感器引导相控阵雷达的协同探测能力.
指示交接;波位编排;动态检测;信息增益;相控阵雷达
随着战场环境的日趋复杂,无源传感器引导雷达在特定空域搜索成为一种重要的异类传感器协同工作模式.在信息引导条件下,缩短雷达捕获目标时间、提高雷达捕获目标的准确性具有重要的实际应用价值.文献[1-2]指出当一个传感器的探测信息不足时,可以通过引导其他传感器补充探测以获取目标更详细的信息,并把传感器提示看做传感器管理的重要组成部分.文献[3]针对目标跟踪问题,考虑了传感器差异进行多传感器管理方法研究.文献[4-5]分析了异类传感器交叉提示的重要作用,并分析了作为被牵引传感器时雷达资源管理的问题.文献[6-7]针对具体的应用,分析了不同类型传感器之间的指示引导问题,分析了引导时机与方法.文献[8-9]对多平台多传感器协同探测的管理架构及方法进行了研究,并根据市场理论、多智能体、动态联盟等技术研究了互牵引传感器如何确定的问题.上述文献研究的重点是指示与引导的产生条件和传感器组合确定,较少研究被引导传感器如何快速、准确地捕获目标.文献[10-11]通过建立被牵引传感器的搜索模型,并通过一定的准则对被牵引传感器参数和波位编排策略进行了优化.然而上述研究方法最大的缺陷在于捕获效果受引导误差的影响较大,对于多种异类传感器在多种引导误差条件下不能保证雷达对目标快速准确的截获.文献[12-13]则主要从雷达传感器单独工作的角度分析波束排列方式等参数的优化问题.笔者将相控阵雷达在信息引导条件下的搜索空域确定和波位编排看做一个动态的过程.在动态检测搜索模型的基础上提出了一种基于信息增益的雷达波位编排方法,避免了由于较大引导误差和雷达虚警导致的盲目甚至是错误的搜索和验证,提高了雷达搜索效率.
1 指示引导过程建模

引导传感器存在测量误差假设目标在空域中出现的概率密度表示为


搜索空域Ω越大,对目标的覆盖效果就越好.但过大的搜索空域会使无源传感器对雷达的指示引导失去意义,同时追求过高的捕获概率并不现实.事实上,只要雷达对目标的截获概率高于一定的门限,就无须扩大搜索范围.若将这一门限定义为目标置信度Pconf,则空域Ω上的截获概率只需满足Pd>Pconf即可.
当空域上存在多个目标时,雷达根据引导信息很有可能截获到干扰目标.为了量化干扰目标对正确截获的影响,需要引入误截获概率的概念.假定空域中存在M个目标,需要捕获的目标是第0号目标,定义误交接概率Pf为捕获到的目标为非0号目标的概率:

误截获概率应保持较小的水平.
2 初始搜索空域的确定
不同于传统的3σ准则[15],笔者根据满足较大的捕获概率、较短的搜索时间和较小的误交接概率要求,将搜索空域的划分抽象为约束条件下的最优化问题.其中目标函数表示为


3 基于信息增益的波位编排策略
传统的相控阵雷达在信息引导下的搜索策略单纯建立在目标落入概率的基础上,这类方法属于静态波位编排,即在搜索之前按目标落入概率由大到小确定波位的搜索顺序,其结果是有限的搜索时间被平均分配给搜索空域内的各波位上.考虑到雷达动态目标检测的实际情况,在搜索过程中依据动态信息增益指导雷达波位编排.
3.1动态检测模型
考虑到雷达传感器作用距离较远,当波位较少时可认为雷达在搜索过程中目标没有出离一个波位的覆盖.由于在确定初始搜索空域时满足了较大的目标截获概率和较小的误截获概率,因此可认为雷达搜索波位上有且仅有一个目标.
在以上假设的前提下,根据统计检测理论[16],若Hk=1,表示目标落在波位内;Hk=0,表示目标没有落在波位,其中k表示波位号,k=1,2,…,N0.将波位k内的先验概率记为qk(0)=p(Hk=1),t时刻在波位i(t)内的检测结果记为z(t),Pd和Pfa分别代表检测概率与虚警概率.目标落入波位的概率的动态更新规则如下.
(1)当雷达在某个波位上检测到目标,即z(t)=1时,概率按如下规则更新: t时刻在波位i(t)内检测到目标的概率为

下一时刻波位内的概率更新为

即如果在波位i(t)内证实了H=1的假设,那么本次检测结果会增加i(t)内的目标落入概率,同时降低目标落在其他波位内的可能性.
(2)当雷达在某个波位上没有检测到目标,即z(t)=0时,概率按如下规则更新:
t时刻在波位i(t)内未检测到目标的概率为

下一时刻波位的概率更新为

即如果在波位i(t)内不能证实H=1的假设,那么本次检测结果会增加目标落在其他波位内的可能性,同时减小i(t)内的目标落入概率.
基于以上的动态检测模型,目标落入某一个波位的概率随着检测结果动态变化.当雷达在某一波位上检测到有目标时,当前波位上目标出现的概率会增大,其他波位上的概率会减小;当雷达在某一波位上没有检测到目标时,当前波位上目标出现的概率会减小,其他波位上的概率会增大.在实际情况下,雷达总要面对一定的虚警概率.当检测结果的准确性较低时,错误的检测可能会导致雷达频繁地在没有目标的波位上搜索和验证,从而降低了搜索效率.
3.2基于信息增益的搜索波位编排策略
从信息论的角度,如果将目标落入概率的变化对应于检测前后波位内H=1不确定性的改变,那么每次检测都可以看做是对波位内信息获取的过程,则在没有目标的波位内检测只能获取少量的信息.将获取信息的多少作为搜索波位的编排依据,就能够保证算法在决策的搜索波位上获得更多的信息,从而提高截获目标的可能性.t时刻雷达在波位i(t)内检测能够获得的信息增益为

上式是在z(t)=0和z(t)=1下两种检测结果下的预测信息增益加权后的结果,由权值 {p z(t)=j| i(t})和信息增益量测函数f两部分组成.权值 {p z(t)=j|i(t})表示每种检测结果出现的概率;信息增益量函数可定义为Shannon熵,Renyi熵,K-L熵等[17].
在动态检测模型下,每次检测结果都会影响其他波位内的目标落入概率,导致这些波位内H=1的不确定性在检测前后也会发生改变.因此,在计算信息增益时需要考虑搜索空域内整体的熵增量,即

以整体信息增益最大作为波位编排准则,算法依次假设搜索空域中的每个波位为下一时刻的搜索波位,并预测该波位内每种检测结果出现的概率.首先,根据假设条件对每个波位在不同检测结果下的目标落入概率进行更新;其次,预测下次搜索获得的全局信息增益;最后,将使全局信息增益最大的假设规划为下一时刻的搜索波位.
4 仿真验证及分析
假设无源传感器测量的误差协方差σθ=σφ=σ,探明空域中有3个目标a、b、c,经人工或机器判断a为感兴趣目标.高测量精度的无源传感器可能在目标区域提供密集的目标信息,但雷达并不能区分出来.若在一定引导误差条件下目标过于稀疏,则无法正确验证方法的优劣.为避免目标过于密集或稀疏的影响,仿真中设其位置数据分别为[37°,54°]、[34°,56°]和[35°,57°],定义雷达波束宽度为1°×1°,检测概率Pd=0.85,虚警概率Pfa=0.1,一次指示引导过程中雷达最多搜索20个波位,目标落入置信度Pconf=90%.
4.1初始搜索空域确定
图1和图2是利用不同方法划分搜索空域的结果.两种方法搜索空域均向远离干扰目标的方向偏离.截获概率:方法一为90.21%,方法二为93.85%,满足置信度要求.误截获概率:方法一为6.56%,远小于方法二的94.63%.这是由于方法一在牺牲截获概率的条件下尽可能地减小错误概率的发生,因此4个误截获概率较高的波位被舍弃.而方法二是从截获概率的角度出发,目的在于优先满足较高的截获概率,因此只将截获概率最小的一个波位替换.综合考虑可知,方法一优于方法二.在后面的分析中初始搜索空域划分均使用方法一.
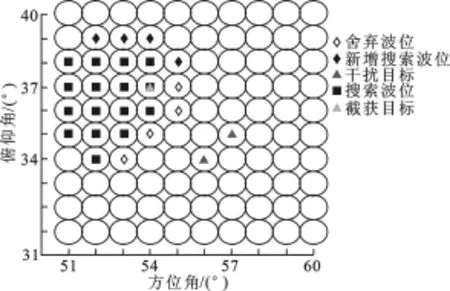
图1 方法一的搜索空域

图2 方法二的搜索空域
4.2搜索波位编排分析
为了说明笔者提出方法的优越性,在不同误差条件下对传统方法与笔者提出的方法在搜索空域和搜索波位编排上进行了比较.如图3和图4所示,当引导信息误差较小时,两种搜索方法都能够通过较少的搜索次数完成目标捕获;当引导信息误差较大时,笔者提出的方法仍然可以用较少的搜索次数完成目标捕获,而传统方法将在更大的范围搜索目标,并且有可能因为超出波位数限制导致交接失败.

图3 传统方法的搜索空域和波位编排

图4 笔者提出方法的搜索空域和波位编排
4.3检测概率的变化分析

参照图4(b)所示的搜索策略,依据信息增益最大准则,搜索算法选择[38°,54°]作为首个搜索波位,但经检测未能验证目标存在,通过概率更新,该波位上的目标截获概率相比先验概率减小,而其余波位上的目标截获概率增加.依据信息增益最大准则,第2个搜索波位选择在[38°,55°]上搜索,仍然没有检测到目标.但是基于信息增益准则,在此位置上搜索仍然是最优选择,于是在此波位上重新搜索.以此类推,直到第7次搜索在[37°,54°]上检测到了目标,该波位上的目标截获概率大幅增加,其余波位上的目标截获概率减小.再次在[37°,54°]上验证的结果,又一次检测到了目标,在第9次搜索时确认了该目标的位置,雷达搜索结束.

图5 截获概率随搜索次数的变化情况(σ=2.0°)

表1 算法性能比较
4.4搜索性能对比
为了避免仿真的随机性影响,在两种引导误差条件下分别对传统方法和笔者提出的方法仿真1 000次,表1给出了两种算法的统计性能比较.可以看出,4.2节分析结果不是偶然的.当引导误差较小时,两种方法都能够在交接时效性要求内正确地截获目标;当引导误差较大时,笔者提出的方法依然能够满足正确截获和时效性要求,而传统方法出现了较多的交接失败.进一步验证,当干扰目标增多时会对误交接概率有一定影响,当多个干扰目标较密集时有可能会影响到初始搜索空域的划分,但由于笔者提出的方法对初始空域划分并不敏感,因此在实际多干扰目标情况下该方法依然具有优越性.
5 总 结
针对空基预警探测系统中无源传感器引导雷达完成目标搜索问题进行了研究.首先建立了指示引导的模型,定义了捕获概率和误截获概率,并在多目标场景下分析了搜索空域的划分方法和计算方法;然后基于动态检测搜索模型,提出了以预测的全局信息增益大的波位先搜索准则作为雷达动态波位编排的依据.在有干扰目标的情况下对这种方法进行了仿真验证,证明了笔者提出方法的优越性,尤其是在大引导误差条件下显著降低了搜索波位数量,并且减少了误交接次数.笔者的研究结果有助于优化无源传感器对相控阵雷达的指示引导性能,提高空基预警探测系统综合探测能力.
[1]ALFRED O,HERO,DOUGLAS C.Sensor Management:Past,Present,and Future[J].IEEE Sensors Journal,2011,11(12):3064-3066.
[2]MALLICK M,KRISHNAMURTHY V,VO B N.Integrated Tracking,Classification,and Sensor Management[M]. Hoboken:Wiley,2013:437-444.
[3]刘钦,刘峥,刘俊.一种多机动目标协同跟踪的博弈论算法[J].西安电子科技大学学报,2012,39(6):49-54. LIU Qin,LIU Zheng,LIU Jun.Collaborative Tracking Algorithm for Multiple Maneuvering Targets Based on the Game Theory[J].Journal of Xidian University,2012,39(6):49-54.
[4]KATSILIERIS F.Sensor Management for Surveillance and Tracking:an Operational Perspective[D].Delft:Delft University of Technology,2015.
[5]NARYKOV A S,KRASNOV O A,YAROVOY A.Effectiveness-based Radar Resource Management for Target Tracking [C]//2014 International Radar Conference.Piscataway:IEEE,2014:7060253.
[6]SALVAGNINI P,PERNICI F,CRISTANI M,et al.Non-myopic Information Theoretic Sensor Management of a Single Pantiltzoom Camera for Multiple Object Detection and Tracking[J].Computer Vision and Image Understanding,2015,134:74-88.
[7]MURATORE M,SILVESTRINI R T,CHUNG T H.Simulation Analysis of UAV and Ground Teams for Surveillance and Interdiction[J].The Journal of Defense Modeling and Simulation:Applications,Methodology,Technology,2014,11(2):125-135.
[8]樊浩,黄树彩,高美凤.多传感器交叉提示多目标探测动态联盟技术研究[J].宇航学报,2013(11):2381-2386. FAN Hao,HUANG Shucai,GAO Meifeng.Research on Technique of Multi-target Detection Using Multi-sensor Crosscueing Based on Dynamic Coalition[J].Journal of Astronautics,2013(11):2381-2386.
[9]吴巍,李朝霞,刘博,等.基于多智能体与市场理论的多机载平台传感器管理[J].系统工程与电子技术,2014,36(1): 68-75. WU Wei,LI Zhaoxia,LIU Bo,et al.Study on Multi-airborne-platform Sensor Management Based on Multi-agent and Market Theory[J].Systems Engineering and Electronics,2014,36(1):68-75.
[10]张睿华,杨宏文,郁文贤.多目标情况下IRST和雷达的指示交接问题[J].电子与信息学报,2011,33(5):1101-1106. ZHANG Ruihua,YANG Hongwen,YU Wenxian.The Handoff Method of IRST and Radar Under Multi-target Scenario[J].Journal of Electronics&Information Technology,2011,33(5):1101-1106.
[11]ZHANG Z,ZHU J,LI H.Optimal Search Algorithm for Phased Array Radar without Indication Information[C]// Sixth International Conference on Intelligent Human-Machine Systems and Cybernetics.Piscataway:IEEE,2014:322-325.
[12]孙涛,山秀明,陈鲸.空间监视相控阵雷达匹配搜索技术研究[J].系统工程与电子技术,2013,35(6):1183-1187. SUN Tao,SHAN Xiuming,CHEN Jing.Research on Technology of Mmatch Search by Space Survillance Phased Arry Radar[J].Systems Engineering and Electronics,2013,35(6):1183-1187.
[13]ZRNIC D S,MELNIKOV V M,DOVIAK R J,et al.Scanning Strategy for the Multifunction Phased-array Radar to Satisfy Aviation and Meteorological Needs[J].IEEE Transactions on Geoscience and Remote Sensing Letters,2015,12 (6):1204-1208.
[14]唐书娟,许蕴山,肖冰松.无源传感器引导AESA雷达目标搜索[J].空军工程大学学报:自然科学版,2015,16(3): 30-35. TANG Shujuan,XU Yunshan,XIAO Bingsong.Passive Sensor Cueing of AESA Radar for Target Searching[J]. Journal of Air Force Engineering University:Natural Science Edition,2015,16(3):30-35.
[15]路志伟,李明,季晓光.基于传感器协同技术的雷达搜索空域研究[J].航空计算技术,2006,36(5):28-31. LU Zhiwei,LI Ming,JI Xiaoguang.Research on Radar Searching Volume Based on Mutil-sensor Cooperation Technology[J].Aeronautical Computing Technique,2006,36(5):28-31.
[16]赵树杰,赵建勋.信号检测与估计理论[M].北京:清华大学出版社,2005:122-127.
[17]WILLIAMS J L.Information Theoretic Sensor Management[D].Cambridge:Massachusetts Institute of Technology,2007.
(编辑:郭 华)
Airspace and searching strategy of radar under the information guiding condition
TANG Shujuan,XU Yunshan,BI Duyan,YANG Tao
(Aeronautics and Astronautics Engineering College,Air Force Engineering Univ.,Xi’an 710038,China)
Aimed to improve the time-validity and accuracy of radar under the information guiding,the cueing and handoff model is proposed and the division method of the searching airspace is analyzed according to the elements of confidence coefficient,timeliness and false handoff probability.Based on dynamic detection theory,the dynamic beam position arrangement is proposed by predicting the global information gain.Simulation results show that the proposed method can capture the target quickly and accurately on condition of a large guiding error and improve the cooperative detection capability of passive sensor guiding of radar.
cueing and handoff;beam position arrangement;dynamic detection;information gain;phased array radar
TN959
A
1001-2400(2016)01-0173-07
10.3969/j.issn.1001-2400.2016.01.031
2015-04-18
航空电子系统综合技术重点实验室和航空科学基金联合资助项目(20145596025)
唐书娟(1983-),女,讲师,空军工程大学博士研究生,E-mail:busybring@163.com.
