欠驱动式水下监测机器人航路点轨迹跟踪控制技术研究
2016-09-12国家海洋监测设备工程技术研究中心山东省海洋环境监测技术重点实验室山东省科学院海洋仪器仪表研究所青岛266001
袁 健(1.国家海洋监测设备工程技术研究中心;2.山东省海洋环境监测技术重点实验室;3.山东省科学院海洋仪器仪表研究所,青岛 266001)
欠驱动式水下监测机器人航路点轨迹跟踪控制技术研究
袁 健1,2,3
(1.国家海洋监测设备工程技术研究中心;2.山东省海洋环境监测技术重点实验室;3.山东省科学院海洋仪器仪表研究所,青岛 266001)
欠驱动式水下剖面监测机器人要实现对预定剖面轨迹航路点的跟踪观测,其航路点的轨迹跟踪控制技术是实现高精度剖面观测的关键。研究思路为:首先采用物理建模和实验验证方式对水下机器人进行动力学建模;其次通过设计分布式控制器A和控制器B以及两者之间的通信协议,实现对通信时延的实时计算;然后通过扰动前馈和逐次逼近转换方法,设计能有效抑制脐带缆等外扰动并解决通信网络时延的网络化前馈-反馈最优轨迹跟踪控制方法。其中为实现平滑控制通过设置跟踪误差阈值和控制切换面,设计一种能实现无抖振航路点轨迹跟踪的分段复合有限时间跟踪控制方法。研究步骤为机器人动力学建模、前馈-反馈最优跟踪控制和分段复合有限时间跟踪控制算法设计以及控制方法的仿真和实验验证,分步进行并验证设计方法的有效性,为欠驱动式水下剖面监测机器人的轨迹跟踪控制技术提供理论依据。
欠驱动式;水下剖面监测机器人;轨迹跟踪;有限时间跟踪控制
1 引言
海洋环境监测在开发海洋资源、预警海洋灾害、保护海洋环境等方面都有着重大意义[1,2]。海洋监测技术发展已进入立体综合监测阶段。航空、航天遥感技术在一定程度上解决了从空中到海洋表层的实时和准实时的同步、大面积观测问题,海面观测台站、海上锚泊资料浮标、水下潜标、坐底式的海床基观测系统等,可解决某一特定海区的定点观测,调查船和漂流浮标虽然可做断面、剖面观测,但又无法对特定区域,例如危险区域、敏感区域进行接近观测[3-5]。而海洋水下剖面观测平台,则成为填补观测空白的手段之一。AUV已广泛应用于海洋科学考察和海洋开发领域,在观测海洋内部过程中的作用日益显著。在自主水下航行器(AUV)的开发和利用方面已有众多的科研机构参与,如美国伍兹霍尔研究所、大西洋大学、法国海洋开发研究院、俄罗斯希尔绍夫海洋资源研究院等国际知名科学院所都开展了AUV的研究和开发工作。伍兹霍尔海洋研究所(WHOI)在研究水下观测平台方面一直得到美国海军方面的经费支持,技术水平一直处于领先水平。其中,“远程环境监测装置”(Remote Environmental Monitoring Units, REMUS)是最有代表性的水下观测平台,是一种低成本的海洋环境监测和调查的多任务作业平台。其研究得到美国海洋大气局和海军研究局的经费支持,目的是为了支持长期水下生态学环境观测(LEO-15)和自动海洋采样网络(AOSN)[6,7]。俄罗斯科学院远东分院目前正在研究利用太阳能作动力的自主式水下移动平台。该平台的突出特点是它在上浮时,太阳能电池板浮出水面,将太阳能转化成电能为蓄电池充电,并完成观测数据的发送、指令接收及定位[2]。中科院沈阳自动化所开发了可用于大范围水下环境监测的水下滑翔机器人,并成功进行了湖上试验。上海交通大学海洋工程国家重点实验室开展了深海水下机器人的产业化研制[8];哈尔滨工程大学智能水下机器人重点实验室借助其在水下机器人领域的综合优势,开展了AUV水下组合导航、动力定位以及智能控制方法的研发[9];西北工大近年在AUV的协同导航与协同控制研究方面取得了大量的科研成果[10,11];浙江大学海洋工程系开展了深海水下移动传感网和水下运载器的研发,并成功的进行了海试;中国海洋大学信息学院开展了水下传感器网络组网实验与自主水下航行器的SLAM导航与协调控制方法的研究[12-14];中国科学院海洋研究所研制了用于近海海洋环境检测的轻型遥控机器人,可以检测腐蚀电位、温度、深度等16个参数[9],北京大学工学院、北京理工大学自动化学院和北航自动化学院在水下多智能体系统的协调控制方法方面进行了深入的研究,等。我国对海洋特定区域的海洋环境断面、剖面观测仍然存在一定的技术局限,一是水下监测设备的采样能力不足,监测频率低,机动监测能力不足。二是是仅限于海水表面的监测,对一定深度的海水缺乏动态监测手段;或者仅限于某些固定海域的垂直剖面监测,缺乏精细化监测/观测能力。海洋水下剖面观测机器人平台,成为填补观测空白的手段之一。水下剖面监测机器人要实现对预定剖面轨迹航路点的跟踪观测,其轨迹跟踪控制技术是实现高精度剖面观测的关键技术,但由于海流扰动等因素的影响,很难精确控制机器人的位置和姿态[15,16];另一方面,水下机器人自身蓄电池能量有限,综合考虑外界洋流影响、航路点跟踪精度和驱动能量消耗的前馈-反馈最优跟踪控制技术是需要解决的关键科学问题之一。
图1为项目组设计的水下剖面监测机器人控制器[17-19],包括置于船载控制箱内的控制器1和置于水下机器人仪器舱内的控制器2, 二者通过脐带电缆进行通信,控制器1实时采集船载控制器控制面板的遥控控制指令,并将控制指令按照自定义的通信协议进行编码和组装成帧,经由通信模块发送到水下控制器2;水下控制器2实时接收船载控制器1发送的协议帧,并进行协议解码,按照协议格式解析出控制指令,进而控制继电器驱动板上的对应的继电器的开关动作,从而实现对水下机器人运动位置和姿态的控制[20]。该控制器可以实现手动操控机器人和机器人的快速自动轨迹跟踪控制的自动切换。水下机器人控制器一般采用集中控制方式,仅在水下机器人仪器舱内设有一个控制器,通过多芯脐带电缆将岸上的控制命令发送到水下控制器进行采集,摇杆状态与电缆的芯数相对应,这样会增加脐带电缆的重量,对水下机器人的姿态控制带来了外界不利影响。供电方式多采用船载220VAC电源直接供电方式,通过脐带电缆为水下机器人供电,水下机器人仪器舱内设有电压转换模块;但由于交流电会对通信质量带来影响,使通信误码率较高,水下推进器出现误动作的几率较高。另外,若船载直接转换为水下控制器电路板所需的工作电压,则电压在传输过程中由于电容效应会出现压降,达不到控制板电路板的正常工作电压。控制器之间较多采用485通信方式,其传输距离多能达到1000米左右,由于受到水下扰动的影响,其传输距离进一步缩短;485通信方式难以满足剖面监测具有的大范围、高深度监测的特点。一般情形下光缆通信方式传输距离能达到几公里,而且光缆通信质量好,误码率极低,质量轻,对水下剖面监测机器人带来的扰动小,有利于机器人的精确控制,但较长的通信距离会引入较大的控制时滞[21,22],导致控制性能下降甚至发散,不能准确跟踪预定的航路点[9]。如何克服时滞对控制性能的不利影响,设计高速通信网络情形下的带有时滞的、能有效抑制洋流影响的网络化最优跟踪控制方法是需要解决的关键科学问题之一。为了减小机器人到达预定航路点的时间,研究有限时间的轨迹点跟踪控制方法[23,24],设计一种快速无抖振的水下剖面监测机器人控制器是需要解决的关键问题之一。
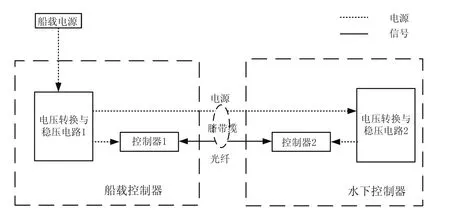
图1 水下剖面监测机器人控制结构图
2 欠驱动式机器人动力学建模
3 航路点轨迹跟踪控制算法设计
研究在水下机器人系统动力学模型(1)的基础上,实现航路点轨迹跟踪控制算法的设计和验证。主要包括:
3.1分段复合有限时间跟踪控制算法设计
水下扰动源多、机器人动力学系统非线性强,同时由于工作环境的复杂性和未知性,使得传统的控制方式不能很好地解决外界扰动情形下的运动控制,并且传统的变结构控制方法会导致控制器产生较大的抖振。水下机器人的有限时间轨迹控制器就是设计控制方法使水下机器人在有限的时间内跟踪上预定的参考轨迹点和参考控制输入。下图为分段复合有限时间跟踪控制方法与其他跟踪控制方法的对比示意图。首先在水下机器人坐标系下定义位姿误差方程,为减小机器人到达预定航路轨迹点的时间,设计一种分段复合有限时间的轨迹点跟踪控制方法,能实现机器人轨迹的快速无抖振控制。为减小在预定轨迹点的位置抖动,在预定轨迹点处的两侧设置一个切换控制边界层并设定切换控制边界层的宽度,用来减缓有限时间控制器的过冲影响。切换控制边界层的宽度需要根据跟踪性能的过冲状态进行设置,宽度较大时,系统运行到边界层的时间虽较短,但在边界层内过渡时间较长,不利于有限时间内的跟踪;宽度较小时,系统运行到边界层的时间虽较长,极易产生运动过冲,导致系统震荡。在切换控制边界层内外采用不同的跟踪控制方法:切换控制边界层外,采用有限时间跟踪控制方法可以实现轨迹的快速跟踪,在切换控制边界层内采用平滑控制方法,防止运动状态的抖动,使机器人平滑运动到预定航路轨迹点。本文提出的复合有限时间跟踪控制方法综合了平滑控制方法和有限时间控制方法的优点,能够实现有限时间内的无抖振跟踪控制。
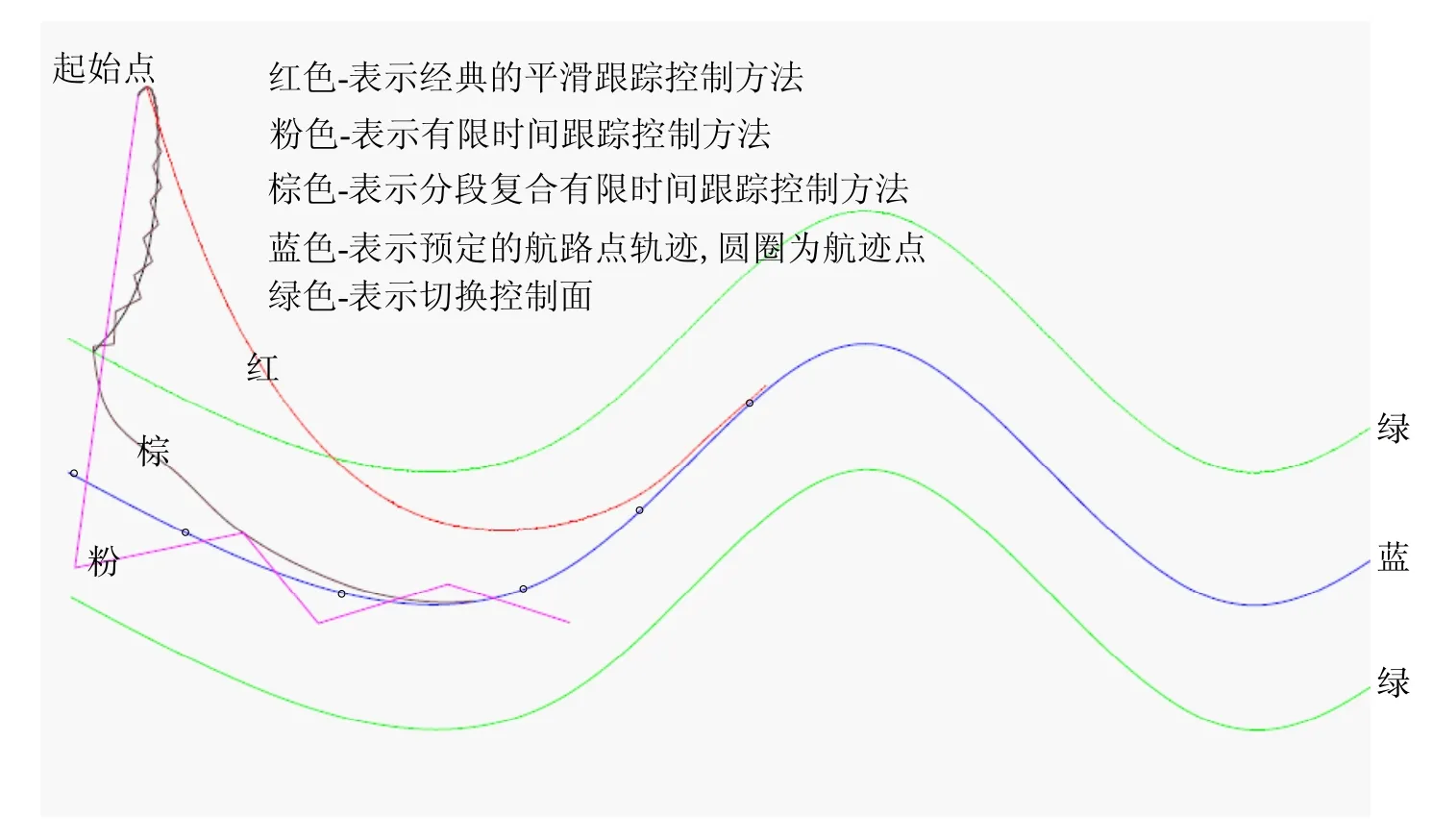
图2 分段复合有限时间跟踪控制方法与其他跟踪控制方法的比较
3.2前馈-反馈最优跟踪控制方法设计
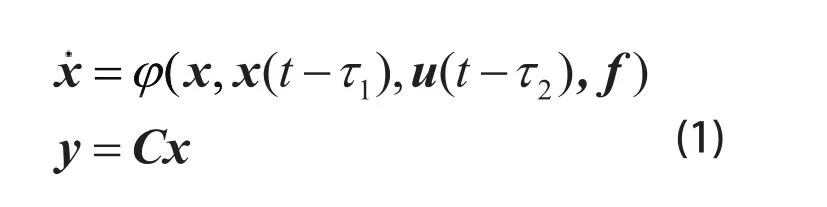
水下剖面监测机器人轨迹跟踪控制系统为持续海流干扰作用下的控制系统,控制性能即要求有一定的控制精度,又要求尽可能节能,利用二次型性能指标的最优控制方法来研究其协同控制问题是合理而有效的。对外扰动进行建模进行系统前馈补偿,能有效抑制外扰动的影响。由于通信网络带来的时滞会导致跟踪控制性能下降甚至发散,拟通过一种逐次逼近转换方法对具有时滞的网络化水下机器人控制系统模型(1)进行轨迹跟踪控制方法设计。对于水下机器人的线性系统方程(1),考虑轨迹跟踪误差和节能控制,选取有限时域的二次型性能指标:
统计学是收集、整理、分析、解释数据并从数据中得出结论的科学。对统计学的学习离不开对大量数据的处理与分析,而借助统计软件是当今统计学教学的主流方向。SPSS是一款优秀的统计软件,具有操作简单、易于上手,统计分析结果专业、科学、准确、美观等诸多优点。在教学中利用SPSS统计软件不仅能方便快捷地得出准确的分析数字与精美的整理结果,而且由于SPSS软件是以变量及其数据结构为基础,菜单加窗口式操作的统计分析模式,在提升统计学教学效果方面可发挥其独到的优越性。

4 轨迹跟踪控制方法的软硬件实现和实验验证
主要研究分布式控制器的软硬件设计、控制算法的软硬件实现以及岸边实验站进行海上试验和改进。具体为:
4.1分布式控制器的软硬件设计
4.1.1控制器(控制器1和控制器2)电路结构设计
水下剖面监测机器人控制器包含置于船载控制箱内的控制器1和置于水下机器人仪器舱内的控制器2两部分。控制器1和控制器2上还包括有串口通信单元、串口/光纤转换器以及存储器单元。该控制器可以实现手动操控机器人和机器人的快速自动轨迹跟踪控制的自动切换。图3为船载控制器(控制器1)结构图,图4为水下运动控制器(控制器2)结构图。
控制器1实时采集船载控制器控制面板的遥控控制指令,并将控制指令按照自定义的通信协议进行编码和组装成帧,经由通信模块发送到水下控制器2。水下控制器2实时接收船载控制器1发送的协议帧,并进行协议解码,按照协议格式解析出控制指令,进而控制继电器驱动板上的对应的继电器的开关动作,继而驱动推进电机进行工作,从而实现对水下机器人运动姿态的控制。控制器1和控制器2包括有串口通信模块、串口/光纤转换器和电压转换和稳压模块。用于水下机器人控制器和船载控制器间的相互通信。通过电压转换和稳压模块将供电电压转换为机器人所需的工作电压,并提供其与控制器1间的远程数据通信,保证信号传输的无失真。
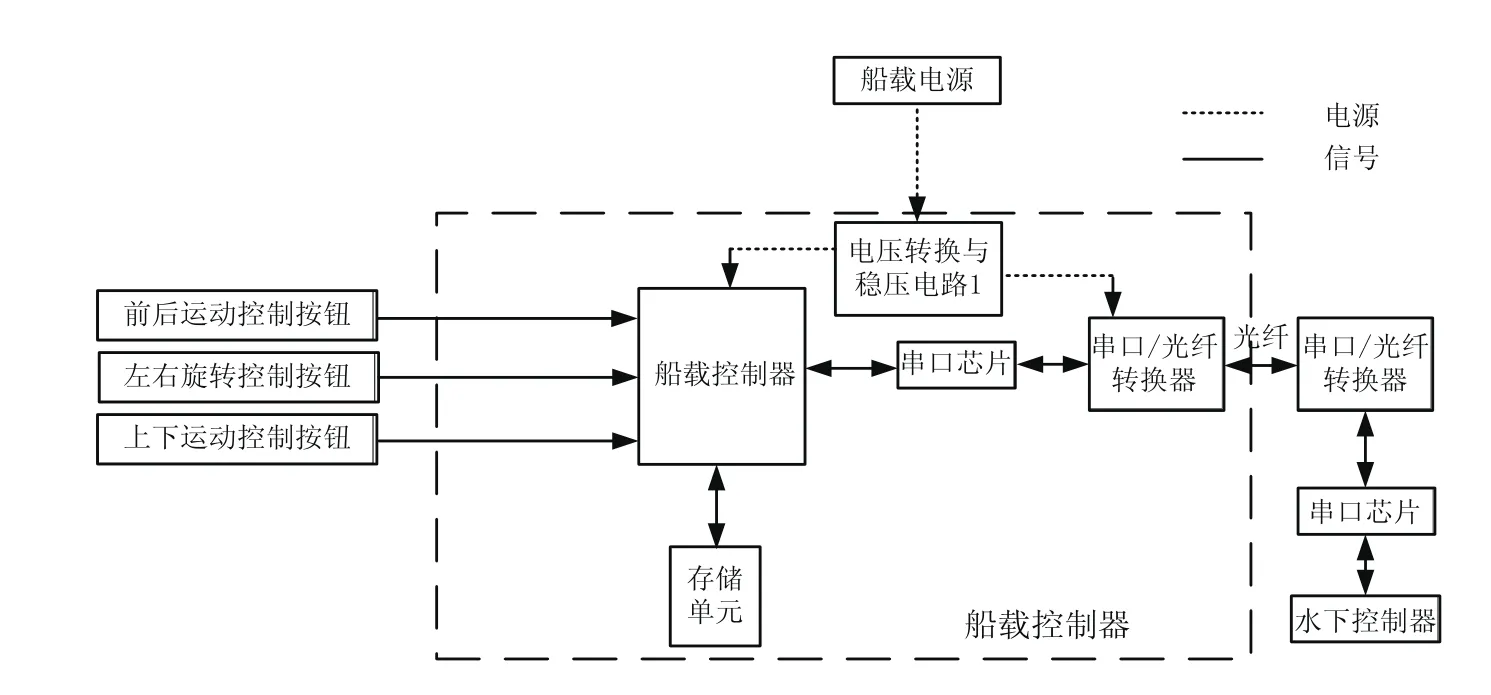
图3 船载控制器(控制器1)结构图
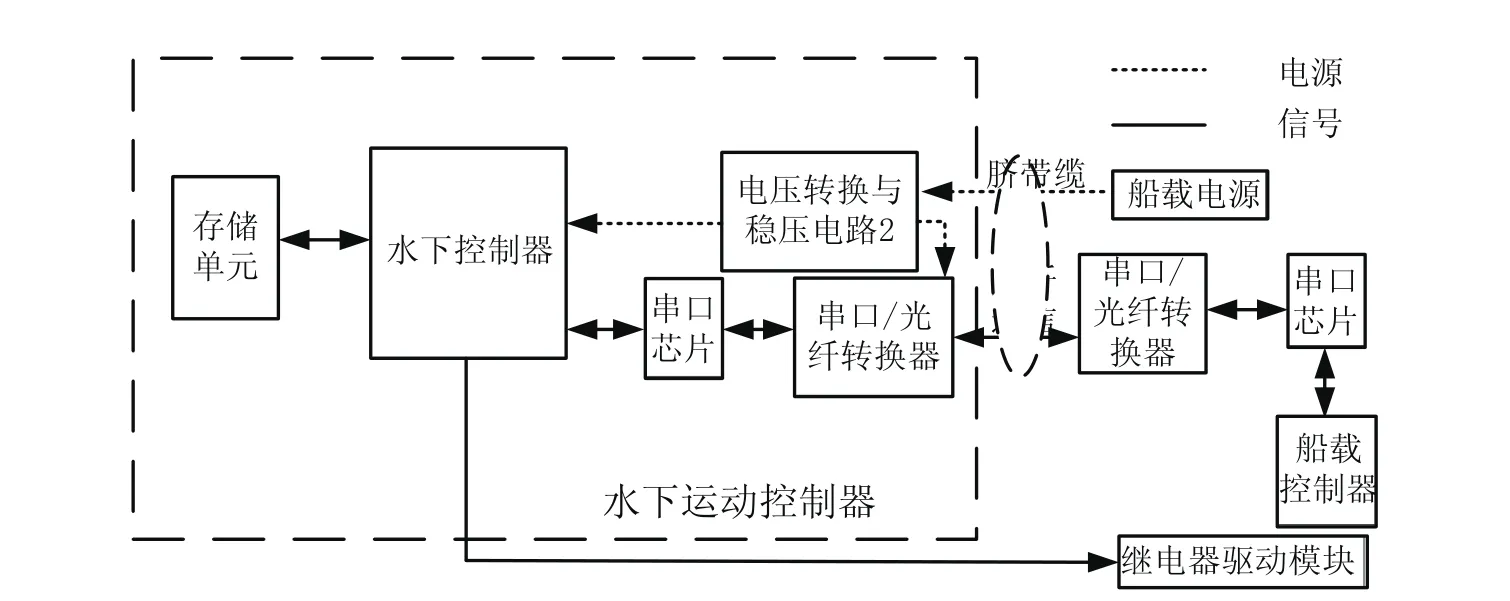
图4 水下运动控制器(控制器2)结构图
4.1.2控制器A和控制器B之间的通信协议设计
针对控制器A和B间通信的具体要求,设计的通信协议帧的帧头和帧尾均由1个字节组成,帧头用于区分是控制数据帧和定位传感器数据帧,序号字段用于区分不同数据帧,相同序号的控制帧和传感数据帧表示同一个控制-传感序列,控制命令字由1个字节组成,如图5(a)所示。控制器B 实时接收船载控制器A 发送的协议帧,并进行协议解码,按照自定义的协议格式的相应字段提取发送时间戳信息控制命令字,计算得到。控制器B检测控制命令字的最高位,如果为0,则为手动操控指令,进而控制继电器驱动板上的对应的继电器的开关动作,继而驱动推进电机进行工作,从而实现对水下机器人的前进、后退、上升、下潜、左右旋转等运动控制;如果为1,则为自动轨迹跟踪控制,该协议的低7位表示此时设定的轨迹点。例如,控制器B 接收到控制命令字为0*****XX,首先检测最高位,这里为0,表示手动操控,然后检测最后两位的状态,如果后两位全为1,则为前进指令;如果后两位全为0,则为后退指令;如果为10 则为左旋指令,如果为01 则为右旋指令。接收到上升和下沉指令时,控制命令字为0***XX**,检测最高位后,再检测第3 和第4 位的状态,如果全为1,则为上升指令;如果全为0,则为下降指令;为避免机器人的横滚,当最高位为0 时,设定其他形式则为无效的控制字,予以丢弃。控制器B 接收到控制命令字为1******* 时,表示自动轨迹跟踪控制,低7位组成的二进制数表示需要设定的轨迹点,此时只控制垂向电机的正反转。控制器B 发出控制指令,控制继电器驱动板上的对应垂向的继电器的开关动作,继而驱动推进垂向电机进行工作。自动轨迹跟踪控制模式下,控制器B 实时检测定位传感器的值,通过控制器B 的具有比较功能的端口,与设定跟踪控制轨迹点的预定值进行比较,利用在控制器B 中的自动轨迹跟踪控制方法,实现对水下机器人轨迹跟踪控制。循环冗余检测(CRC)也由1个字节组成,控制器B通过CRC检测算法计算并检测协议最未位,并与接收到的CRC值进行对比,完成对数据帧的差错检测,出现错误则丢弃该数据包,不进行机器人操控。图5(b)为控制器B发送给控制器A的定位传感器数据通信协议格式。控制器B将发送时刻和计算得到的加入到数据帧中并发送给控制器A,控制器A接收数据帧,按图5(b)所示的帧格式进行解帧处理,提取发送时间戳信息、和传感器信息,计算得到和表征机器人位置的传感器数据,这样就可以获得时延和的值。

图5 (a) 控制器A发送给控制器B的控制通信协议格式

图5 (b) 控制器B发送给控制器A的定位传感器数据通信协议格式
4.2轨迹跟踪控制方法的软硬件实现
4.2.1船载遥控网络化控制器的软硬件实现
在船载遥控跟踪控制模式下,控制器A首先检测其他各个单元的状态,然后启动通信模块,与控制器B进行通信连接。船载控制器按一定时间间隔采集单片机端口的遥控柄开关状态数据和手动/自动切换状态,并按照自定义的协议帧格式,进行打包组装成帧,然后通过串口通信模块以及串口/光纤转换器,发送到水下控制器(控制器B),软件流程如图7所示。控制器B实时接收船载控制器A发送的协议帧,并进行协议解码,按照通信协议格式的相应位解析出控制指令,检测通信协议控制命令字段的最高位,如果为0,则为手动操控指令;根据遥控指令控制继电器驱动板上的对应的继电器的开关动作,继而驱动推进电机进行工作,从而实现对水下机器人的前进、后退、上升、下潜、左右旋转等运动控制。
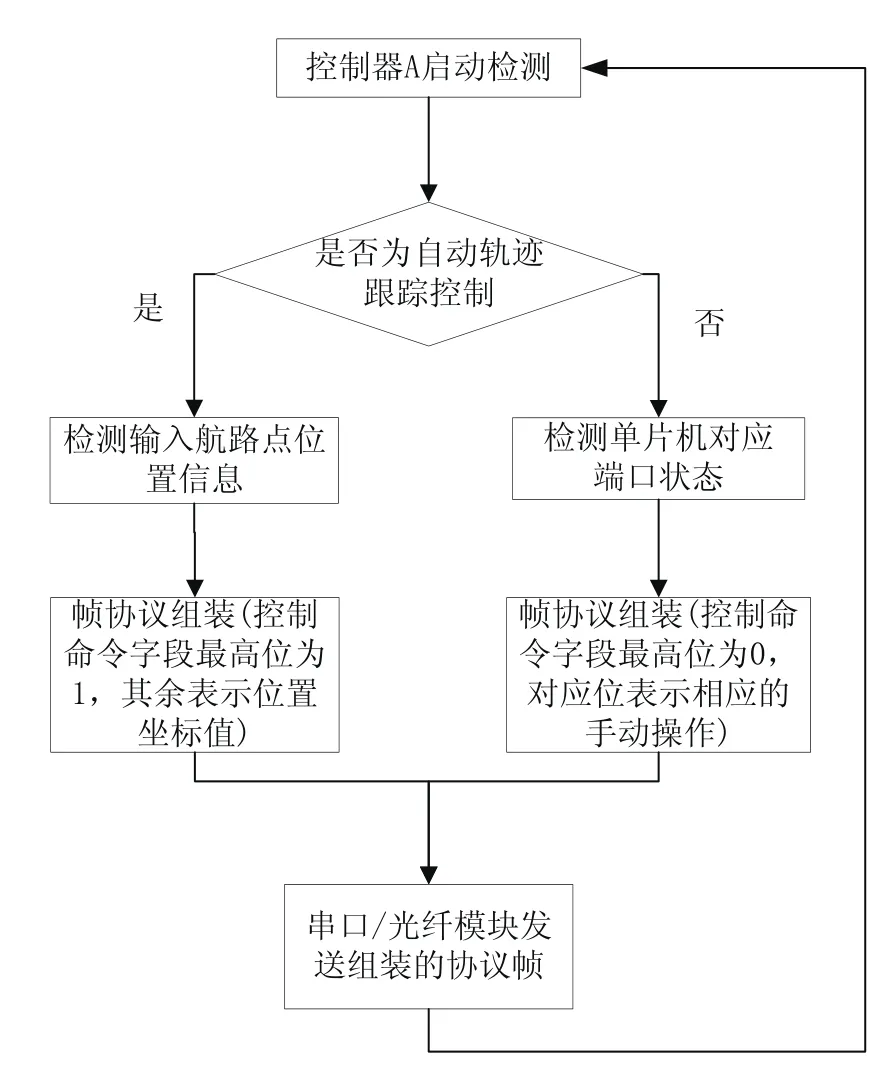
图7 控制器A软件程序流程
4.2.2自动轨迹跟踪控制方法的软硬件实现
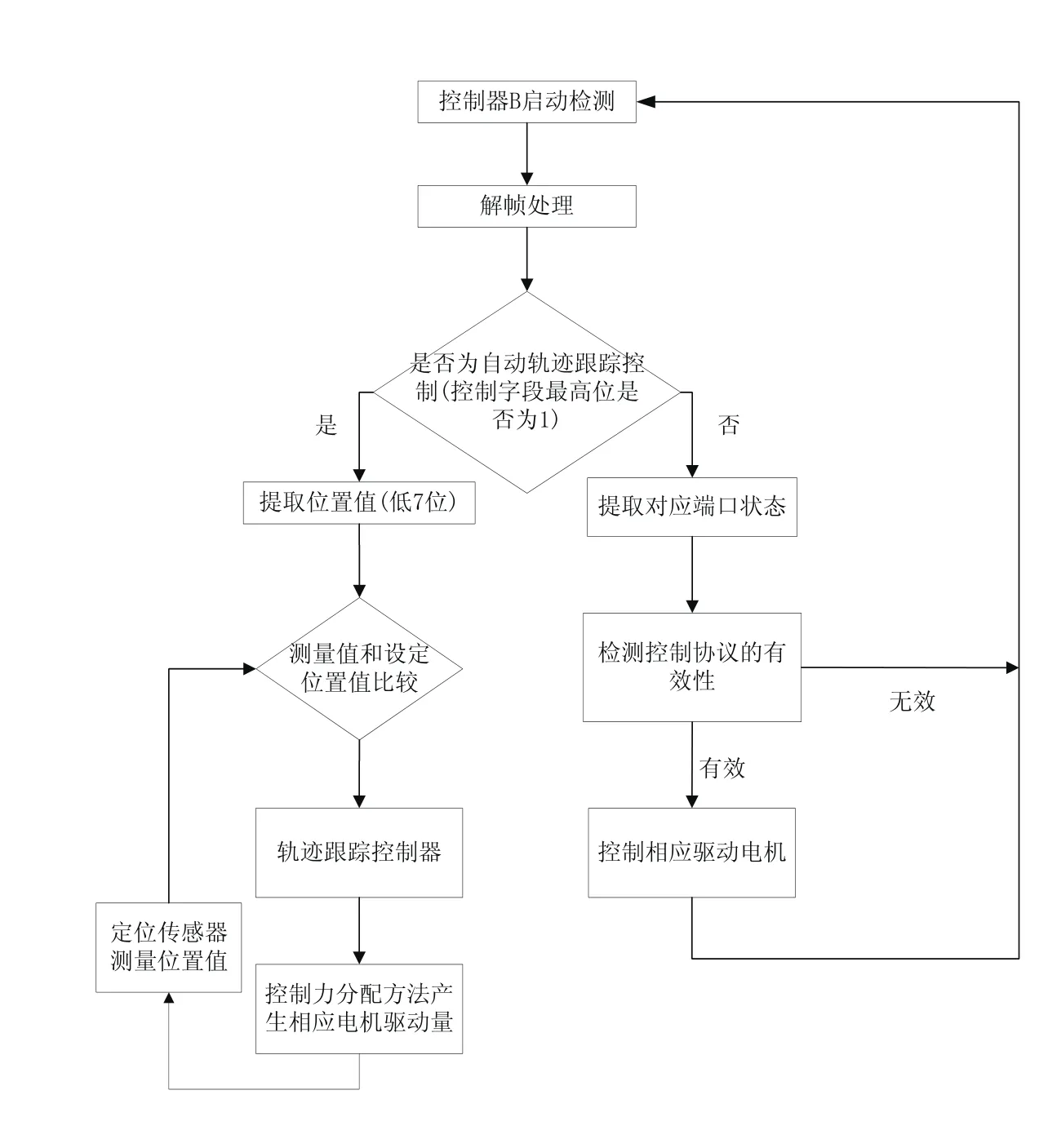
基于设计的轨迹跟踪控制算法,计算出机器人的驱动力和力矩,并在AVRMega128单片机上实现控制算法,根据推进器的布局,将其分配到对应轴的推进电机上,从而驱动相应的电动机并带动螺旋桨按照给定的驱动力和力矩转动,实现轨迹的自动跟踪控制。控制器B接收到控制命令字段为1*******时,表示自动轨迹跟踪控制,低7位组成的二进制数表示需要设定的轨迹点。在自动轨迹跟踪控制模式下,控制器B实时检测定位传感器的值并转化为与设定值一致的统一的格式,通过控制器B的Mega128单片机的具有比较功能的端口,与跟踪控制轨迹点的设定值进行计算比较;考虑到定位设备性能和水下机器人自身控制导致的水下定位误差, 设置一个控制阈值, 该阈值之内认为机器人达到了设定的位置, 不需要对机器人进行控制。
5 采取的研究方案
项目的研究目标是在水下机器人系统动力学模型的基础上,实现控制算法的设计和实验验证。具体的研究步骤为机器人动力学建模、前馈-反馈最优跟踪控制和分段复合有限时间跟踪控制算法设计以及控制方法的仿真、控制方法的软硬件实现和实验验证,分步进行以此验证提出设计方法的有效性(图8所示)。
5.1水下剖面监测机器人动力学建模
水下剖面监测机器人控制系统是一种实现机器人剖面监测和闭环反馈的随动控制器,其由水下控制器、定位传感器(长基线和IMU组合导航提供水下位置,GPS提供水面下水点位置坐标,并将数据转化到统一的坐标系下)和驱动电机(2组电机,水平和垂直方向各一组)组成。水下机器人扰动源多、动力学系统非线性强,同时由于工作环境的复杂性和未知性,使得传统的控制方式不能很好地解决外界扰动情形下的运动控制,需要建立水下机器人的动力学模型,将外扰动建模为外系统并进行前馈控制,实现对外界扰动的有效抑制。项目组前期已对水下剖面机器人进行了动力学建模,同时还需综合考虑水下有限的的驱动能量和跟踪误差,建立能充分考虑以上因素的系统动力学方程。
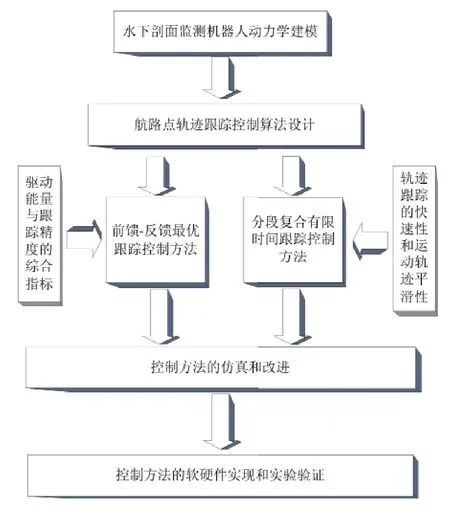
图8 项目研究技术路线
5.2航路点轨迹跟踪控制方法设计
由于网络带来的时滞会导致跟踪控制轨迹震荡甚至发散,拟通过逐次逼近转换方法将具有时滞的网络化水下机器人控制系统方程转化为一系列无时滞的控制系统方程,并基于转化后的系统方程,研究有限时间的轨迹点跟踪控制方法,设计一种分段复合式快速无抖振的水下剖面监测机器人控制方法。通过控制器A和控制器B通信协议的设计,获得通信时延和,然后基于建立的机器人动力学模型和获得的时延和,设计一种网络化的水下机器人轨迹跟踪控制方法,用于船载实时遥控水下机器人实现对给定航路点轨迹的跟踪。通过Matlab进行时滞和控制算法仿真,研究不同通信时延对控制性能的影响。
5.3水下剖面监测机器人控制器仿真和软硬件设计验证
采用Matlab软件验证通信时延对轨迹跟踪误差的影响,分析可容忍的最大通信时延,为控制算法的设计提供实验支撑,并进行控制算法的比较研究和验证,进一步改进最优跟踪控制方法,得出可以实现的最优的控制算法。基于提出的轨迹跟踪控制方法和系统动力学模型,进行水下机器人运动姿态的位置和姿态控制仿真验证。
5.4控制方法的软硬件实现和实验验证
在山东省科学院岸边实验站进行水下机器人剖面监测轨迹跟踪实验,以此验证所设计的剖面轨迹跟踪控制方法的有效性,并根据实验中出现的问题进行改进。将建立的水下机器人动力学模型在Mega128单片机控制器上进行实现,将其作为控制对象,设计控制器水上部分和水下部分的通信控制协议以及基于该通信协议的网络化的机器人控制器。预定航路点位置坐标由预编程写入到机器人的控制器中,机器人的实际水下位置由长基线应答器和陀螺仪、加速度计提供,作为控制系统的检测反馈信号,水下控制器检测该反馈信号,并与预订航路点位置进行比较,基于提出的轨迹跟踪方法进行控制器输出解算,输出对应的直流电机的控制量,通过驱动力输出分配模块,将相应控制量转化为相应的12VDC到24VDC输出电压,控制直流电机旋转,产生相应的推进力,控制机器人向指定位置运动。
6 结论
欠驱动式水下监测机器人航路点轨迹跟踪控制技术是当前水下机器人领域具有挑战的研究课题。项目结合海洋环境剖面监测的实际需求,研究水下剖面监测机器人对设定航路点轨迹的跟踪控制方法及其实验,在被控对象和实验方法上具有一定的特色。设计的控制方法考虑到轨迹跟踪的实际需求和控制对象的控制特性,设计一种能有效抑制外扰动的能量最优的跟踪控制方法和一种快速实现轨迹跟踪的分段复合有限时间跟踪控制方法。通过设计控制器A和B以及通信协议,实现对通信时延的计算;通过前馈控制和逐次逼近转换方法,提出能有效抑制外扰动并解决通信网络时滞的网络化前馈-反馈最优跟踪控制方法。通过设置跟踪误差阈值和控制切换面,提出能够实现航路点轨迹跟踪的无抖振分段复合有限时间跟踪控制方法。项目组研制了一台用于海洋剖面监测水下机器人,并在岸边实验站进行了实验。利用本单位的实验水槽和岸边实验站可以进行一些水下机器人相关参数的进一步测定,获取与机器人建模相关的水动力参数,完善机器人的动力学方程;利用长基线和IMU作为组合导航位置传感器进行定位信息的实时获取。下一步课题组将在多AUVs的协同控制技术方面开展研究,重点研究基于水下通信MODEM的多个AUV的协同组网控制方法,研究基于多智能一致性的(consensus)的AUV最优编队控制方法及其实验验证。研究无GPS、北斗等情形下的基于加速度计和陀螺仪的惯性导航技术和自主导航滤波算法研究。开展AUV的SLAM方法研究,选取合适的传感器进行SLAM的算法设计及其实验验证。
[1] Wood S, Nulph A, Howell B. Application of autonomous underwater vehicles[J]. Sea Technology, 2004, 45(12): 10-14.
[2] Ageev M D. Application of solar and wave energies for long-range autonomous underwater vehicles[J]. Advanced Robotics, 2002, 16(1): 43-55.
[3] Hemond H F, Mueller A V, Hemond M. Field Testing of Lake Water Chemistry with a Portable and an AUV-based Mass Spectrometer[J]. Journal of the American Society for Mass Spectrometry, 2008, 19(10): 1403-1410.
[4] Shome S N, et al. AUV for shallow water applications: Some design aspects[A]. Proceedings of the 18th International Offshore and Polar Engineering Conference[C], 2008.429-435.
[5] Spiewak J M, Jouvencel B, Fraisse P. A new design of AUV for shallow water applications: H160[A]. Proceedings of The Sixteenth International Offshore and Polar Engineering Conference[C],2006.233-238.
[6] Leonard N E, Fiorelli E. Virtual leader, artificial potentials and coordinated control of groups[J]. IEEE Conference on Decision and Control, Orlando, FL, USA, 2001,(3): 2968-2973.
[7] Leonard N E, Paley D A, Davis R E, et al. Coordinated control of an underwater glider fleet in an adaptive ocean sampling field experiment in Monterey Bay[J]. Journal of Field Robotics, 2010,27(6): 718-740.
[8] Feng Z P, et al. Formation Control of Underwater Mobile Sensing Network[J].Journal of Shanghai Jiaotong university,2009,E-14(5). [9] 李晔,庞永杰,唐旭东.一种智能水下机器人进行大范围海洋环境监测的方案与实验[J]. 热带海洋学报, 2009, 28(4): 12-16.
[10] 闫伟, 严卫生, 王银涛, 姚尧.通信时延下欠驱动自主水下航行器编队控制[J]. 火力与指挥控制, 2011, (6):52-55 .
[11] 崔荣鑫, 徐德民, 严卫生. 仅利用位置信息的自主水下航行器主从式编队控制方法[J]. 兵工学报, 2008, 29(8): 980-984.
[12] 袁健,唐功友. 基于一致性和虚拟结构的多自主水下航行器编队控制[J]. 智能系统学报,2011, (3):248-253.
[13] Yuan Jian, Tang Gong-You. Finite-time Tracking Control Algorithms based on Variable Structure for Mobile Robots[A]. Chinese Control Conference[C].Beijing, 2010.419-423.
[14] Yuan Jian, Tang Gong-You. Formation Control for Mobile Multiple Robots with Hierarchical Virtual Structures[A]. IEEE International Conference on Control and Automation[C].Xiamen,2010.393-398.
[15] M.S. Naik, S.N. Singh. State-dependent Riccati Equation-based Robust Dive Plane Control of AUV with Control Constraints[J]. Ocean Engineering. 2007, 34(11-12): 1711-1723.
[16] Zhang Hong-bin, Yuan Jian. An Improved Controller based on Chattering-free Trajectory-tracking Control for Underwater Profile Monitoring Vehicle[J].Applied Mechanics and Materials, 2014,(568-570) : 944-947.
[17] 袁健,周忠海 等. 一种网络化海洋水质监测系统[P]. 中国专利,201220737710.9,2013.07.10,.
[18] 周忠海,袁健 等. 一种海洋水质监测数据采集系统[P]. 中国专利, 201320581982.9, 2014.03.18.
[19] 周忠海,袁健 等. 一种遥控水质监测水下机器人系统[P]. 中国专利, 201320568687.X,2014.03.04,.
[20] Kim K, Choi H S. Analysis on the controlled nonlinear motion of a test bed AUV-SNUUV I[J]. Ocean Engineering, 2007, 34(8-9):1138-1150.
[21] Zhang Bao-lin, Tang Gong-you, Yue Dong. Optimal disturbance rejection control for singularly perturbed composite systems with time-delay[J]. Asian Journal of Control, 2009,11(3):327-335.
[22] 唐功友,盖绍婷.时滞系统在高速网络下的最优扰动抑制[J],控制理论与应用,2009,27(7):965-970.
[23] Zhou Zhong-Hai, Yuan Jian, Zhang Wen-Xia, Zhao Jin-Ping. Chattering-free Finite-time Tracking Control Algorithms with Variable Structure for Mobile Robots[A].Chinese Control and Decision Conference[C].Taiyuan, 2012.1337-1342.
[24] Yuan Jian, Zhang Wen-Xia, Zhou Zhong-Hai. A Compound Finite-time Trajectory-tracking Control Algorithm for Mobile Robot with System and Measurement Noise, International Journal of Sensing[J].Computing and Control, 2012, 2(1): 38-49.
(责任编辑:张 萌)
Waypoint Trajectory-tracking Control Methods with High-resistance to Disturbance for Under-actuated Underwater Profile Monitoring Vehicle
YUAN Jian1,2,3
(1. National Engineering and Technological Research Center of Marine Monitoring Equipment;2. Qingdao, Shandong Provincial Key Laboratory of Ocean Environment Monitoring Technology;3. Institute of Oceanographic Instrumentation of Shandong Academy of Sciences ,Qingdao 266001)
Under-actuated underwater profile monitoring vehicle can achieve the observations on apredetermined profile waypoint trajectory, the trajectory-tracking controltechnology is the key technology to achieve high-precision profile observations. The controller A, controller B and their communication protocol will be designedto calculate the real-time time delay; using physical modeling and experimentalverification to establish the dynamics model of the underwater vehicle; byconstructing a feedforward control and using delay-free transformation, we designa networked feed-forward and feedback optimal trajectory-tracking control methodconsidering the external disturbances rejection and communication time delay. Tocarry out the smooth control, we construct a tracking error threshold and aswitching surface to design a free-chattering segmented compound control methodfor quick trajectory-tracking. The detailed steps are dynamics modeling,feed-forward and feedback optimal tracking control design,multistage finite-timetracking control design, simulations and experimental verification of the controlmethods. We verify the effectiveness of the proposed methods step by step. The control scheme provides a theory basis for trajectory-tracking control technologyof underwater profile monitoring vehicle.
Under-actuated;Underwater profile monitoring vehicle;Trajectory-tracking control;Finite-time tracking control
中图文献号:TP273;U69A
10.3969/j.issn.1003-8256.2016.01.006
山东省自然科学基金(ZR2012FL18);青岛科技发展计划(13-1-4-172-jch);山东省海洋生态环境与防灾减灾重点实验室开放课题(201308);山东省科学院博士基金(201244)
袁健(1980-),男,山东荣成人,博士,助理研究员,研究方向为水下导航与控制。
