双频GPS载波相位相对定位精度分析与评估
2016-09-09战杰孙贵新
战杰,孙贵新
(中国人民解放军91550部队,辽宁 大连 116023)
双频GPS载波相位相对定位精度分析与评估
战杰,孙贵新
(中国人民解放军91550部队,辽宁 大连116023)
双频GPS载波相对相位定位精度高,但其自身的定位精度不易有效分析和评估,为此,本文在分析了GPS定位的常用精度分析方法的基础上,提出了一种基于三角闭合差法和双天线法的联合精度分析和评估方法,该方法构建一个由多个观测量所组成的统计变量,并利用该变量方差与定位误差方差之间的确定关系,通过计算该变量的方差来求取定位误差的方差。实验结果表明:采用该方法统计得到的双频GPS定位精度在0.3米以内,基本达到了双频GPS接收机标称的理论指标,同时也完全满足了精度鉴定中对于真值标准的要求。
双频GPS;载波相位;相对定位;精度分析
GPS载波相对定位技术,具有精度高、全天候、全程跟踪测量等优点,用载波相位差分GPS定位系统的测量值作为真值,可完成高精度的光学仪器、脉冲雷达等外测设备的精度鉴定工作[1]。但在高动态应用条件下,由于受各方面因素的限制,对其自身定位精度的有效评估一直是个难题[2]。本文通过实验采集了大量的双频GPS观测数据,对双频GPS接收机相对定位的精度进行了分析与评估。实验结果表明:双频GPS定位精度在0.3米以内,基本达到了双频GPS接收机标称的理论指标,同时也完全满足了精度鉴定中对于真值标准的要求。
1 常用的GPS定位精度分析方法
衡量精度的指标主要有3种:均方差(中误差)、平均误差和或然误差。从理论上讲,当n→∞时,它们都可作为衡量精度的指标,其效果是等价的。但由于实际观测值的个数n是有限值,只能求得它们的估值。在这种情况下,均方差比平均误差和或然误差能更灵敏地反映大误差的影响[3]。当前,世界各国都普遍采用均方差作为衡量精度的指标。
在实际观测中,观测值是一系列离散的抽样值,其偶然误差△(即真误差)是服从正态分布N(0,σ2)的随机误差。因此可求得其方差和均方根差,现用σ2和σ表示:

方差σ2的平方根σ,称为均方根差,简称均方差。σ愈小,观测精度愈小。反之σ愈大,精度愈低。由于真误差反映了观测值偏离真值的程度,所以利用真误差计算σ2或σ的大小能比较真实、准确地反映观测精度的高低,测量上常用方差或均方差作出衡量精度的指标。
1.1GPS静态定位精度分析方法
在分析GPS静态定位精度时,由于考虑到各种软件采用的算法模型不同,得出的结果只能说明接收机本身的内符合精度[4]。只有同精确值之差得出的外精度才能说明该系统(硬件和软件)的真正精度,因此,对静态目标的精度考核普遍采用与已知精确坐标差分,统计残差均值和方差的方法进行。
具体做法是:在地面上精确测定的两GPS基准站(记为GPS1#和GPS2#),现在各站分别设置一台GPS接收机进行同步观测,假设GPS1#为基准站,GPS2#为流动站。GPS接收机利用载波相位差分解算出GPS2#天线位置,并与GPS2#已知精确坐标作差,并对得到的残差统计均值和均方差,从而得到对GPS的静态测量精度。
1.2GPS动态定位精度分析方法
由于用静态目标我们不能有效的考核周跳检测软件,也不能有效考核周跳检测死区及修复后残存误差带来的测量误差。因此对载波相位差分定位的动态精度并不能有效考核。而动态GPS测量不像静态测量那样具有方便的重复性,很多现有的误差分析理论对此无能为力。对于相位差分GPS定位系统,单独采用任何一种精度分析方法,都无法准确实现其动态精度评定,必须选取几种方法综合评估,并进行数据融合处理,才能评定该系统的测量精度是否达到要求。
目前,可以采用三角闭合差法和双天线法来联合考核动态定位精度[5-6]。两种方法的基本思想是:一般情况下,由于观测值的真值不确定,因此误差也无法计算;为此,我们可以构建一个由多个原始观测数据组成的统计变量,由于该变量的真值是可以计算得到的,因此可以利用该变量方差与定位误差方差之间的确定关系,通过计算该变量的方差来求取定位误差的方差。
1)三角闭合差法
三角闭合差法是在原基准站和目标的基础上增设1个以上基准站,形成多边形的观测基线。利用相邻两接收机同步观测数据可得到多条向量,理论上这些向量应是闭合的。
如图1所示,设基准站Bi和Bi+1与GPS动态点S相对定位,确定了位置矢量r→i和r→i+1,则两个基准站与动态点构成闭合图形,D→i,i+1为已知值,视为没有误差,理论上其3个矢量之和应等于零,即的真值应该为零,但是由于观测误差导致不等于零,因此W→代表两个观测矢量r→i、r→i+1的定位误差,应用方差传播公式,可求得各观测值的方差。
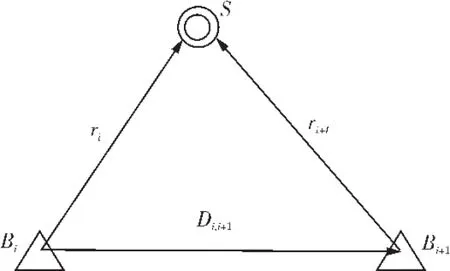
图1 三角闭合差法示意图

设观测时刻ti基准站Bi和Bi+1对动态点S的相对定位结果为(X1(ti)),(Y1(ti)),(Z1(ti))和(X2(ti)),(Y2(ti)),(Z2(ti))总观测历元数为n,则每两个基准站与动态点在空间即可构成n个闭合图形,则根据(1)式,闭合差的标量计算式为:

当基准站为N个,则每个观测时刻可组成(N-1)个闭合图形,总闭合差数为n(N-1)个。
按误差统计理论,坐标闭合差的均方根差为:
根据(WX,WY,WZ)的分量表达式及误差传播规律,有

设(X1(ti)),(Y1(ti)),(Z1(ti))和(X2(ti)),(Y2(ti)),(Z2(ti))是等精度测量值,则
通过以上分析可知,三角闭合差具有真误差性质,它较好地反映了观测量精度情况,可作为检验粗差、系统误差、评定定位精度的依据。但是在闭合差的处理过程中将丢失相关性较强的误差分量。闭合差并非多边形中各站测量误差的综合结果,它只能在一定程度上反映测量误差的大小。
2)双天线法
双天线法是在校飞飞机上安装两台用户接收机,两接收机天线在整个运动过程中相对距离保持不变,设距离为R为已知值,视为真值。在运动过程中,通过两天线的分别定位结果可求出两天线间的距离为R(ti),将R(ti)与事先测得的真值R作差分得到ΔR(ti),理论上ΔR(ti)=R(ti)-R应该等于零,由于存在观测误差导致ΔR(ti)不等于零,应用方差传播公式,可求得各观测值的方差。具体方法如下:
设观测时刻ti两天线的定位结果为(x1(ti),y1(ti),z1(ti)和x2(ti),y2(ti),z2(ti))则

则按误差统计理论,可得距离的方差为

则依全微分公式可得如下误差关系式

设(x1(ti),y1(ti),z1(ti))和(x2(ti),y2(ti),z2(ti))是等精度观测值,则


这种方法避免了真值的动态测量,可提供高精度的真值,这是它的主要优点。在用两天线间距离去评定精度的过程中必然存在两接收机定位结果的求差过程,其结果是相关误差丢失。
2 实验数据分析
实验中采用JAVAD双频GPS接收机,其基线精度为1 mm+ 1 ppm,事后处理软件采用的是加拿大 Waypoint公司的GrafNav解算软件。
以下分析中所用数据的技术指标分别为:

表1 GPS静态相对定位结果与基准站坐标作差(单位:m)
1)观测卫星数≥7颗,卫星截止高度角≥15度;
2)数据采样方式为L1、L2双频采集,采样间隔0.1 s;
3)卫星图形强度因子:PDOP≤3。
2.1双频接收机静态相对定位精度分析
实验中选用了五个GPS站点,分别为 GPS1#、GPS2#、GPS3#、GPS4#、GPS5#,五个站的大地坐标都是精确已知的。现在各站分别设置一台GPS接收机进行同步观测,设GPS1#为基准站,GPS2#、GPS3#、GPS4#、GPS5#为流动站。精度分析分四种不同基线长度进行,差分定位方式分别为双频解算(DF)和单频解算(SF)两种方式,并将静态差分解算结果分别与各流动站的站点坐标进行硬比对精度分析,具体分析如下所示。
由表1中数据分析可得出如下结论:
1)对于短基线,单双频机都能达到很高的定位精度,双频相对定位精度在0.008 m以内,单频相对定位精度在0.04 m以内。
2)对于中长基线,由于双差后还存在残余误差,所以单频解算的定位精度较短基线时明显降低,3个方向的定位精度在1米以内;而对于中长基线的双频定位,3个方向的相对定位精度保守估计在0.1 m以内。
3)单频解算的定位精度随着基线长度的增加而降低。由于单频接收机只能接收Ll载波信号,不能有效消除电离层延迟影响,短基线(小于15 km)时单频解算定位精度高是因为信号到达两天线所经过的电离层路径是大致相同的,可以用站间双差法来抵消电离层延迟的影响。当基线较长时,电离层误差增大,单频解算的定位精度明显降低。
4)当基线长度较长时,采用双频接收机可以明显改善GPS差分定位精度。对于几百公里基线的双频解算同样能达到较高的定位精度,这是因为采用双频载波差分定位,能很好地消除电离层对电磁波信号延迟的影响,尤其在太阳活动高峰期,其结果将明显优于单频数据的处理结果。
2.2双频接收机动态相对定位精度分析
对动态相对定位精度的分析,采用了三角闭合差法和双天线法结合进行。具体做法是:实验中选用了两个GPS基准站,分别记为GPS1#、GPS2#;在校飞飞机上分别安装两GPS接收天线,分别用move1#和move2#表示,两天线间距离R(即真值)事先精确测得。GPS1#、GPS2#、move1#和move2#进行同步观测。
通过对GPS1#、GPS2#和任一移动天线组成动态三角闭合差,可分别得到三角闭合差曲线和定位均方根误差,具体如图2(a)、(b)、(c)和表2所示;通过选用任一基准站分别对移动天线move1#和move2#进行相对定位,可得到move1# 和move2#的定位结果,从而可计算出两天线间距离的测量值,通过对距离测量值与真值间的差分,可得到距离均方根差,具体如图3所示。
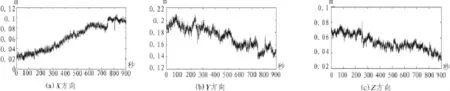
综合以上的图和表可知,两种方法对动态GPS的定位精度的分析结果基本一致。在飞行的平稳段,双频GPS定位精度在0.3 m以内,动态相对定位的精度非常高,基本达到了双频GPS接收机标称的理论指标,同时也完全满足了精度鉴定的要求。
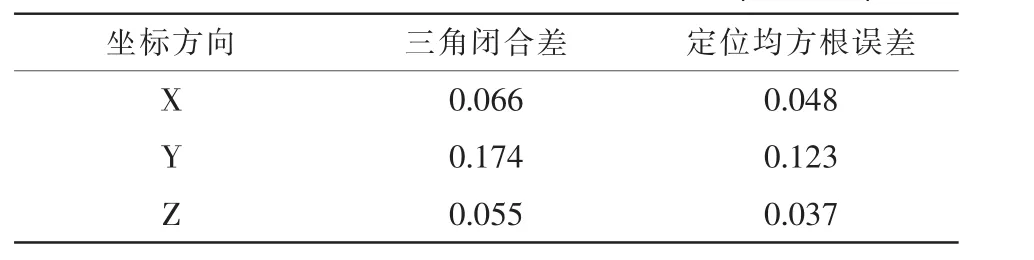
表2 X、Y、Z方向闭合差及定位均方根误差(单位:m)
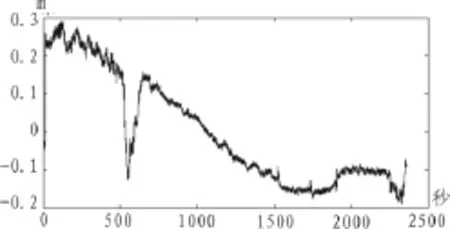
图3 双天线法测量距离差分曲线(σR=0.14 m)
3 结 论
GPS载波相位差分定位是目前精度最高的卫星测量定位方式。双频接收机相对定位的精度非常高,跟踪稳定,其测量值作为真值,可完成高精度的光学仪器、脉冲雷达等外测设备的精度鉴定工作,对于高精度测量发挥了重要的作用。但是,GPS定位精度不但同接收机和事后处理方法有关,还和跟踪时段、测量条件、电磁环境、大气条件等很多因素有关,因此对GPS定位精度的认识还需做更深入的研究。
[1]刘丙申,刘春魁等.靶场外测设备精度鉴定[M].北京:国防工业出版社,2008.
[2]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005.
[3]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[4]王仁谦.GPS动态定位的理论研究[D].中南大学,2004.
[5]张勤,李家权,等.GPS测量原理及应用[M].北京:科学出版社,2005.
[6]刘利生,吴斌.卫星导航测量差分自校准融合技术[M].北京:国防工业出版社,2007.
Carrier-phase relative positioning of dual-frequency GPS accuracy analysis and assessment
ZHAN Jie,SUN Gui-xin
(Unit 91550 PLA,Dalian 116023,China)
Dual-frequency GPS Carrier has high accuracy for relative positioning,but it is difficult to analyze and assess its positioning accuracy.For this reason,based on the analysis of common accuracy analysis methods of GPS positioning,A joint evaluation method was proposed with triangle misclosure and double antenna.The method conducts a statistical variable which has a determined relation with the positioning errors,so the positioning error variance is gained by statistical analysis of the variable.Experimental results show that dual-frequency GPS positioning accuracy gained with the proposed method is within 0.3 meters,which basically reaches the theoretical index of dual-frequency GPS receiver,and also meets the true value standards in accuracy identification.
dual-frequency GPS;carrier-phase;relative positioning;accuracy analysis
TN98
A
1674-6236(2016)16-0070-03
2015-08-06稿件编号:201508027
战杰(1978—),男,辽宁抚顺人,硕士,工程师。研究方向:外测事后数据处理。
