基于内模控制器的最大风能跟踪控制研究
2016-09-08任永峰胡宏彬韩俊飞内蒙古工业大学电力学院内蒙古呼和浩特00080内蒙古电力科学研究院内蒙古呼和浩特0000
陈 建,任永峰,胡宏彬,韩俊飞,陶 军(.内蒙古工业大学电力学院,内蒙古呼和浩特00080;.内蒙古电力科学研究院,内蒙古呼和浩特0000)
基于内模控制器的最大风能跟踪控制研究
陈建1,任永峰1,胡宏彬2,韩俊飞2,陶军2
(1.内蒙古工业大学电力学院,内蒙古呼和浩特010080;2.内蒙古电力科学研究院,内蒙古呼和浩特010020)
采用基于定子侧磁链定向的矢量控制策略来实现最大功率的跟踪,该控制策略是基于功率外环电流内环的双闭环控制方式。在双闭环控制中使用了基于内模原理的控制器,并将基于内模控制的结果与传统的PI控制的结果进行对比分析。仿真结果表明,基于内模原理的内模控制器(IMC)比PI控制器具有更强的补偿时间滞后的能力,响应速度更快,更稳定,抗干扰的能力更强。基于双馈式异步风电机组建立了仿真模型,给出了在PSCAD/EMTDC环境下的仿真结果。
最大功率跟踪;双闭环控制;内模控制器;双馈式异步风电机组
随着能源消耗急速增长,寻求可持续能源,减少二氧化碳等温室气体的排放量,是当今发展新能源的主要驱动力。而风能作为一种可替代的清洁型能源,其开发利用越来越受到重视[1]。为了充分利用风力资源,实现风能的最大化利用,要求风电场投入使用的风机具备最大功率跟踪(MPPT)的能力。传统的恒速恒频风力发电系统虽然结构简单,控制起来较为容易,但是转速只能运行在同步转速附近,当风速较大或较小时其风能利用率很低,造成了风能的极大浪费。而变速恒频风力发电系统转速范围较大,可以分别运行在亚同步、同步、超同步三个状态[2-3]。当风速低于额定风速时,它能根据风速的变化,在运行中保持最佳叶速比以获得最大风能;当风速超过额定风速时,利用桨矩角的调节使得输出功率保持恒定。因此变速恒频风电系统得到了广泛的应用。
国内外学者对DFIG型风电场最大功率跟踪策略做了很多的研究。文献[4-5]中采用了基于变步长扰动的MPPT控制原理。文献[6]采用了转速-最大功率曲线方法。文献[7]采用了基于定子磁链定向的矢量控制技术来实现最大功率的跟踪。目前使用基于定子磁链定向的矢量控制技术来实现最大功率跟踪的研究很多。该控制策略是基于功率外环、电流内环的双闭环控制方式,而且传统的双闭环控制大多采用的是PI控制器。本文采用了基于定子磁链定向的矢量控制策略来实现最大功率跟踪,并在双闭环控制中使用了基于内模原理的控制器。仿真结果表明基于内模原理的内模控制器(IMC)比PI控制器具有更强的补偿时间滞后的能力,响应速度更快,抗干扰的能力更强,能更准确地实现最大功率的跟踪。
1 风力机运行特性及最大功率跟踪基本原理
1.1风力机运行特性
根据贝茨理论,把风电机组的电气特性作为主要研究对象[8],简化的风力机数学模型为:

式中:Pw为风力机输出功率;Cp(β,l)为风能利用系数;v为风速;R为叶片半径;ρ为空气密度。

式中:li=wTR/v为风机叶片的叶尖线速度与风速的比值,wT为风力机角转速。根据不同的b、l取值,由式(2)计算得到的Cp(b,l)曲线如图1所示。

图1 风力机Cp-l曲线
当风速变化时,wT也会跟着变化以保证叶尖速比为最佳值。li=wTR/v代入式(1)得到风机输出功率与风机角速度之间的关系表达式:

当l=lopt时,可得到风力机的最佳功率为:

1.2最大功率跟踪基本原理
风力机输出功率Pw与转速ww之间存在对应关系。在任何一种风速下都存在一个最大功率点与最佳转速相对应,而最大功率点的连线即为风力机功率的特性曲线Popt。因此只要风力机运行在该曲线上,就可以实现风力机的最大风能追踪。
当风速变化时,通过控制DFIG输出的有功功率来控制DFIG的电磁转矩,间接地控制机组的转速,使其保持最佳叶尖速比,从而实现最大风能的捕获。
2 双馈式异步发电机数学模型
DFIG具有双馈能通道,其定子侧直接与电网相连,转子侧连接相位、幅值、频率均可调的三相励磁电源,通过控制励磁电源实现定子侧恒压恒频电力输出。
双馈式发电机定、转子均采用电动机惯例,其数学模型表示如下。
(1)电压方程
定子电压方程:

转子电压方程:

式中:uds、uqs、udr、uqr分别为定、转子电压的dq轴分量;ids、iqs、idr、iqr分别为定、转子电流的dq轴分量;ws=wl-wr为dq坐标系相对于转子的电角速度,即转差电角速度。
(2)磁链方程
定子磁链方程:

转子磁链方程:

式中:Lm=3/2×Lms为dq坐标系同轴等效定子与转子绕组间的互感;Ls=Lls+3/2×Lms为dq坐标系等效两相定子绕组的自感;Lr=Llr+3/2×Lms为dq坐标系等效两相转子绕组的自感。
将磁链方程代入电压方程,得到dq坐标系下的电压-电流方程:

(3)转矩方程和运动方程
变换到dq同步旋转坐标系后,运动方程形式不变,电磁转矩方程变为:

3 内模控制的基本原理及最大功率跟踪控制策略
3.1内模控制的基本原理
内模控制是一种实用性比较强的控制方法。该控制方法具有很强的动态跟踪性能,可以很好地消除各种干扰因素对系统的影响。该控制器不光设计结构较为简单,而且控制参数也较为单一,同时该控制方法还不需要过分依赖被控制对象的数学模型。正因为如此,该控制方法在现代工业控制中得到了广泛的应用。
如图2所示,G(s)、M(s)、Q(s)分别为被控过程、被控过程的数学模型以及内模控制器,这是内模控制的最主要三个部分。将图2所示的内模控制结构进行等效简化,可以得到图3所示的控制结构。图3中,C(s)可以用Q(s)和M(s)来表示:

或:

由此可以得到:

从上式可以看出,假如有G(s)=M(s),且Q(s)M(s)=1,则有输出等于输入。这就意味着该控制系统能使输出及时跟踪输入信号,且不受外界干扰的影响。但是在实际的工业控制过程中很难满足G(s)=M(s)这一条件,这样一来系统的稳定性就很难得到保证。为了解决这一问题,可以将内模控制器的设计分为两步来进行:

图2 内模控制结构框图

图3 内模控制等效框图
(1)被控对象内模分解。将 M(s)分解成 M+(s)和 M_(s),即M(s)=M+(s)M_(s)。式中:M_(s)代表最小相位部分,而M+(s)则代表含纯时滞和右半平面零点部分。
(2)内模控制器的设计。为了克服因数学模型不精确给系统带来的影响,并获取良好的动态响应,可通过引入低通滤波器F(s),令:

低通滤波器的传递函数为:

在选择g时,必须使Q(s)较容易实现而且还需要使Q(s)的分母的阶次高于分子的阶次。
从上述可以看出,内模控制实际上就是利用内模控制器Q(s)将控制对象G(s)与模型M(s)之间的差值放大,然后选取合适的Q(s),进而使控制系统性能能够满足实际的工业控制要求[9-12]。
3.2最大功率跟踪控制策略
双馈风力发电机并网运行时,采用的是转子电流内环、定子输出功率外环的双闭环控制策略[13-14]。
双馈风力发电机并网运行的双闭环控制结构中,dq轴采用的是同一原理,所以只说明其中一个轴,其结构框图如图4所示。

图4 双闭环控制系统结构
(1)转子电流反馈控制器的设计。从图4中可得电流内环在忽略各扰动项的条件下,被控对象传递函数G(s)为:

如果被控对象与模型匹配,则有:

以上为最小相位系统,因此内模控制器可以设计为:

而低通滤波器传递函数可以设计为:

于是转子电流反馈控制器传递函数为:

(2)忽略各种扰动项,功率反馈控制器的被控制对象传递函数为:

如果被控制对象与模型匹配,则有:

以上为最小相位系统,故内模控制器可以设计为:

而低通滤波器传递函数可以设计为:

于是功率反馈控制器传递函数为:

从上述反馈控制器的设计中可知,电流内环只有低通滤波器参数k1,而当k1确定后,功率反馈控制器也就只有一个可调参数k2。可见,该控制器不光设计结构较为简单,而且控制参数也很单一。
通过上述分析可得双馈风力发电机并网运行时的双闭环内模控制框图,如图5所示。
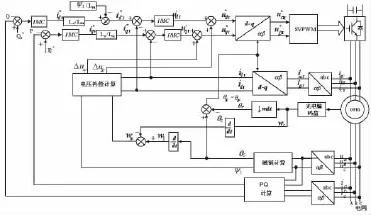
图5 最大功率跟踪控制框图
从图5可以看出,在控制过程中首先将有功、无功功率给定值P*和Q*与实际值P和Q的差值通过内模控制器进行优化处理,并根据定、转子之间的耦合关系得到转子电流的给定值iqr*和idr*。然后将转子电流的给定值iqr*和idr*与实际值iqr和idr的差值通过内模控制器输出,得到转子电压解耦项Uqr'和Udr',接着将该解耦项与转子电压补偿项Δuqr和Δudr叠加后便得到了转子电压给定值uqr*和udr*,最后经过坐标系的变换得到双馈发电机转子侧三相电压给定值 uar*、ubr*、ucr*。通过SVPWM控制来产生对转子侧变流器进行控制的脉冲,从而实现对双馈式风力发电机最大功率的跟踪控制,同时该控制方法还能实现有功、无功功率的解耦控制。
4 仿真实验
本文基于PSCAD/EMTDC软件建立了2 MW双馈式异步风力发电系统模型,给出了分别基于PI控制器和内模控制器的仿真结果,其中风速模型由基本风、阵风、渐变风以及噪声风四部分构成。仿真模型从0.88 s开始实现并网。仿真参数如表1所示。

??????/V 690 ????/pu 0.012 1 ???????????? ????/MW 2 ????/pu 3.472??????? 16 000 T /s 0.000 4 ????/Hz 50 ??????/s 0.5 ????/pu 0.010 8 ????k 0.000 20 ????/pu 3.464 ????k 0.000 75
基于PI控制器的仿真结果如图6、图7所示。
基于内模控制器的仿真结果如图8、图9所示。
5 结论
从仿真结果可以看出基于定子磁链定向的矢量控制策略,很好地实现了最大功率的跟踪。将PI控制器的仿真结果与基于内模控制的仿真结果对比分析可知,基于内模控制的仿真波形要更加平滑,震荡更小。因此内模控制器比PI控制器表现出了更快的动态响应能力以及更强的抗干扰能力,从而更好地实现最大功率的跟踪。采用内模控制器下的电磁转矩震荡也小很多,这大大减小了对齿轮箱的损害,有利于减少风机故障的发生。

图6 基于PI控制器的有功、无功功率曲线

图7 基于PI控制器的电磁转矩

图8 基于内模控制器的有功、无功功率曲线

图9 基于内模控制器的电磁转矩
[1]吴政球,干磊,曾议,等.风力发电最大风能追踪综述[J].电力系统及其自动化学报,2009,21(4):89-93.
[2]陈毅东,杨育林,王立乔,等.风力发电最大功率点跟踪技术及仿真分析[J].高电压技术,2010,36(5):1322-1325.
[3]曾志勇,冯婧,周宏范.基于功率给定的双馈风力发电最大风能捕获策略[J].电力自动化设备,2010,30(6):25-29.
[4]KAZMI R S M,GOTO H,GUO H J,et al.A novel algorithm for fast and efficient speed-sensorless maximum power point tracking in windenergyconversionsystems[J].IEEETranson IndustrialElectronics,2011,58(1):29-36.
[5]MENNITI D,BURGIO A,SORRENTINO N,et al.An incremental conductance method with variable step size for MPPT:design and implementation[J].Electrical Power Quality and Utilisation,2009, 26:1-5.
[6]马袆炜,俞俊杰,吴国祥,等.双馈风力发电系统最大功率点跟踪控制策略[J].电工技术学报,2009,24(4):202-207.
[7]付明晓,李守智.变速恒频风力发电系统最大风能追踪的控制[J].电力系统及其自动化学报,2013,25(1):74-78.
[8] 席文飞,刘峰,孙彪,等.2 MW双馈式风电机组最大功率追踪控制研究[J].大电机技术,2012,5(3):36-40.
[9]HU J B,HE Y K,ZHU J G.The internal model current control for wind turbine driven doubly-fed induction generator[J].Industry Applications Conference,2006,62(3):209-215.
[10]TAN W.Unified tuning of PID load frequency controller for power systems via IMC[J].IEEE Transactions on Power Systems,2010,25 (1):341-350.
[11]王东风,王剑东,韩璞,等.基于内模原理的PID控制器参数整定[J].华北电力大学学报,2003,30(4):42-46.
[12]马浩淼,高勇,杨媛,等.基于内模控制的变速恒频双馈风力发电系统[J].电力电子技术,2012,46(10):67-69.
[13]胡利民.双馈风力发电机空载并网与转子侧变流器内模控制研究[D].秦皇岛:燕山大学,2011:27-32.
[14]宋春华,胡丹,柯坚.内模控制在电流调节器中的应用[J].电力自动化设备,2008,28(4):15-16.
Study of MPPT strategy of DFIG based on IMC
CHEN Jian1,REN Yong-feng1,HU Hong-bin2,HAN Jun-fei2,TAO Jun2
(1.Electric Power College,Inner Mongolia University of Technology,Hohhot Inner Mongolia 010080,China; 2.Inner Mongolia Electric Power Research Institute,Hohhot Inner Mongolia 010020,China)
The stator flux oriented vector control strategy was used to realize MPPT,and the control strategy was based on power outer loop and current inner loop.PI controller was generally used by the Double loop control,but the IMC was used and the comparative analysis of the result between the PI control and internal model control was given.The simulation results indicate that the IMC is with more strong time delay compensation ability,more fast response speed,more stable and anti-jamming than PI controller.A simulation model of DFIG was built and simulation results on PSCAD/EMTDC platform were given.
MPPT;double-loop control;inner model controller;doubly-fed induction generator
TM 315
A
1002-087 X(2016)01-0166-03
2015-06-12
国家自然科学基金(51367012);教育部新世纪优秀人才支持计划 (NCET-11-1018);内蒙古自治区自然科学基金(2011BS0903,2015MS0532);内蒙古自治区“草原英才”工程资助(CYYC2013031);风能太阳能利用技术省部共建教育部重点实验室开放基金(201403)
陈建(1987—),男,湖北省人,硕士,助教,主要研究方向为风力发电低电压穿越。
