基于Lagrange方程的3-PPR并联机构动力学分析与仿真*
2016-09-08谢志江
张 军,谢志江
基于Lagrange方程的3-PPR并联机构动力学分析与仿真*
张军1,谢志江2
(1.长江师范学院 机械与电气工程学院,重庆408100; 2.重庆大学 机械传动国家重点实验室,重庆400044)
以3-PPR并联机构为研究对象,通过运用欧拉旋转矩阵和矢量法推导了该机构的运动学逆解,求解了机构的雅克比矩阵,为机构建立动力学模型提供理论依据。运用拉格朗日方程法和虚功原理建立了该机构的动力学模型。通过运用MATLAB编写该模型的仿真程序,进行逆动力学仿真,将仿真结果与该模型在ADAMS中进行的仿真结果进行了对比分析,二者相对误差较小,结果表明所建立的逆动力学模型是正确的,为该机构后续的运动控制奠定基础。
并联机构;动力学模型;拉格朗日;仿真分析
0 引言
动力学分析主要就是研究空间物体所受作用力与物体的运动之间的关系,对整个机器人的运动学研究以及后续对机构进行优化设计研究起着承上启下的作用[1]。对机构进行动力学分析的一个非常重要的前提条件就是必须建立与该机构实际相对等的动力学模型。由于我们所常见的并联机构的结构比较复杂,往往其动力学模型是一个复杂的多变量、多参数耦合和多自由度系统。目前广大科研工作者主要还是采用牛顿-欧拉(Newton-Euler)法[2-3]、虚功原理法[4-5]和凯恩(Kane)方程法[6-7]等方法并联机构的动力学模型。这些不同的建模方法所推导出来的动力学方程式不同,理论依据不同,难易程度也不同,虽然最终所得到的动力学计算结果相同,但往往结果误差相对较大,精度相对较低,不利于机构的运动控制。本文基于3-PPR并联机构的结构特点以及拉格朗日方程式的使用范围,采用拉格朗日方程法,以整个机构的力学系统为研究对象,通过广义坐标系来描述机构的运动,建立3-PPR并联机构的动力学模型和以及对逆动力学模型正确性和精确性进行验证,为机构运动控制提供理论依据。
1 机构位置分析
1.1机构结构分析
3-PPR并联机构主要由定平台、动平台和三组相同的运动支链组成。而运动支链又由直流伺服电机、精密行星齿轮减速机、滚珠丝杠螺母副、十字交叉导轨副、连杆和滚珠轴环等组成。三组相同的运动支链的十字交叉导轨副在定平台上成等边三角形均匀分布。每个十字交叉导轨各自的下导轨通过螺钉与定平台连接,滑块通过连杆与滚珠丝杠螺母连接。上导轨与动平台之间通过滚珠轴环连接形成一个转动副。该并联机构的驱动由三组精密伺服电机带动对应的滚珠丝杠转动,而滚珠丝杠上的螺母通过连杆带动滑块移动。3-PPR并联机构的三维模型如图1所示。

1.动平台 2.定平台 3.直流伺服电机 4.精密行星齿轮减速机 5.滚珠丝杠 6.丝杠螺母 7.滚珠轴环 8.十字交叉导轨副 9.连杆
图13-PPR并联机构三维模型
1.2机构雅克比矩阵
为了对3-PPR并联机器人的运动平台位姿进行详细的描述,需要建立相关的动坐标系和定坐标系。分别将动坐标系O1-X1Y1Z1和固定坐标系O-XYZ固定在动平台和定平台的中心上,如图2所示。在所有运动副处于零位时, 动坐标系方向与固定坐标系方向重合。图中Ui和Bi分别表示各下滑块和各上滑块的中心位置, Di表示各自转动副的旋转中心。3个转动副的转动轴线相互平行且垂直于动平台,且转动中心Di在同一个平面上;三个下滑块共面,且U1和U2的滑动路径相互平行,采用XZ平面对称布置,而滑块U3的滑动路径垂直于U1和U2的滑动路径,且滑块U3中心位于滑块U1和U2连线的中心线上;三个上滑块Bi共面,与各自下滑块的滑动路径垂直,且到各自对应的下滑块的垂直距离相等。
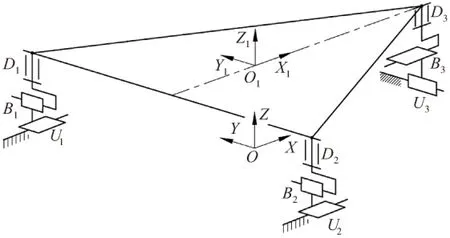
图2 3-PPR并联机构结构图
动平台D1D2D3为等边三角形,中心点到各顶点的距离为2l,下平台U1U2U3为等边三角形,中心点到各顶点的距离为2r。假设动平台的参考点即坐标原点相对定平台在X方向的位移m,在Y方向的位移n,绕Z轴的旋转角度为θ。那么滑块Ui在定坐标系OXYZ中的坐标分别为:
转动副旋转中心Di(i=1,2,3)在动坐标系O1-X1Y1Z1中的坐标分别为:

设滑块U1和U2的X向位移为S1,S2;滑块U3的Y向位移为S3,由该3-PPR机构的特殊性可知,α=θ,β=0,γ=0。则很容易就可以得到转动副的旋转中心Di在定坐标系中的位置坐标Dio及向量UiDio。
转动副的旋转中心Di在定坐标系中的位置坐标Dio为:
滑块Ui到转动副的旋转中心Di的向量坐标UiDio为:

位置反解方程转变成关于动平台位姿的函数如下所示:
S3=f3(m,n,θ)=2lsinθ+n
对并联机构的位置逆解的两端同时分别求偏微分可得:
令
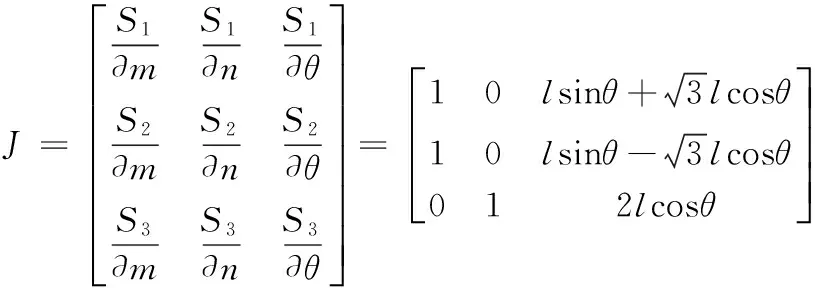
式中[J]3×3即为所要求解的速度雅克比矩阵。
2 拉格朗日动力学模型建立
本文中的3-PPR并联机构是一种双平台多支链并联结构,主要由基座、滑块组、连杆组和动平台组成。如图1所示。拉格朗日动力学模型的精度与系统机构模型的简化有直接的关系。同时,对机构进行模型简化也与动力学建模的复杂程度有直接的关系。在全面综合考虑整个并联机构各个部件的质量、质心分布和体积等因素的影响,本文所建立的动力学模型力求与并联机构实际的模型保持一致。各部件的简化方法说明如下:
① 基座即由底板组成,故可不做任何简化;
② 滑块组由上下滑块组成,形成滑块组;
③ 动平台组由连杆、滚珠轴环和动平台组成,形成一个动平台组;
2.1机构动能分析
根据以上的简化分组方法,我们可以得到并联机构的动能为:
式中:mi—第i个滑块的质量;

m—动平台、滚珠轴环、连杆和三根上导轨的质量之和;
vx—动平台沿固定坐标系X轴移动的速度;
vy—动平台沿固定坐标系Y轴移动的速度;
ωz—动平台绕固定坐标系Z轴转动的角速度;
Jz—动平台绕固定坐标系Z轴转动的转动惯量。
其中,滑块组的速度与动平台组的速度之间有如下关系:
式中:J为雅克比矩阵。
2.2机构势能分析
同并联机器人的动能一样,根据模型简化后可知,整个并联机构的势能为基座的势能、滑块组的势能和动平台的势能之和。由于该3-PPR并联机构所有的活动构件都只在自己所属的平面内做平面运动,因此该机构的势能:P=0。
2.3动力学模型建立
下面用拉格朗日方法求解动平台组上的各个广义分力以及广义合力。
该并联机构系统的拉格朗日函数为:
然后根据拉格朗日方程可以得到下列方程组:
式中:Ji1,Ji2,Ji3为雅克比矩阵J中的子量。
以上所求为作用在动平台组上的广义力分力,则作用在动平台组上的广义力为:
将三个滑块的驱动力组合为矢量形式,即可表示为:
假设各滑块的虚位移分别为:
动平台组的虚位移为
虚位移是在机械系统在约束条件下的无限小位移,则底板上三个滑块所做的虚功之和为:
W1=fT·δl=f1·δ1x+f2·δ2x+f3·δ3y
而动平台组所做的虚功之和为:
W2=FT·δs=Fx·δx+Fy·δy+Tz·δθz
根据虚功原理[5],在动平台末端执行器平衡的情况下,整个并联机构系统中任意位移所产生的虚功总和为零。即滑块所做的虚功之和等于末端执行器动平台的虚位移产生的虚功之和,即有:
W1=W2或fT·δl=FT·δs
又由前面运动学逆解可知:δs=J·δl
即可得到滑块组的驱动力矩与动平台所受到的力的关系:f=JT·F
上式表明,在不考虑滑块与导轨处摩擦的情况,在外力的作用下,末端执行器(动平台)保持平衡的条件是滑块组的驱动力矩满足上式。
3 动力学仿真分析
当动平台在一定的载荷的作用下沿着某一规律运动时,该机构中所有运动副的受力情况也会相应的产生变化。在整个运动过程中,该并联机构的所有运动副的受力情况以及各运动副所受力的变化情况是否满足实际要求,这些数据对于工程设计人员在设计该并联机器人和对该并联机构的实际控制过程中具有重要的意义。因此,对该机构的动力学模型进行动力学仿真就显得非常重要。
在该并联机构的运动学所建模型的基础上,将所做位置逆解时所测量得到的三个滑块的位移曲线图进行数据存储,然后生成3条样条曲线,去掉动平台上的多自由度点驱动,最后将生成的3条样条曲线作为三个对应滑块的驱动运动,使动平台能够得到所期望的运动规律。
三个滑块驱动的驱动轨迹分别为:
TraZ=AKISPL(time,0,SPLINE_1,0)
TraZ=AKISPL(time,0,SPLINE_2,0)
TraZ=AKISPL(time,0,SPLINE_3,0)
在动平台上施加一个垂直于动平台的外载荷,然后进行1秒100步的动力学仿真,就可以在ADAMS的后处理模块中得到三个滑块的驱动力的曲线图。如图3所示。然后在Matlab中对该3-PPR并联机器人进行动力学仿真,所得结果如图4所示。

图3 基于ADAMS仿真的滑块的驱动力

图4 基于Matlab仿真的滑块的驱动力
在两个视图中分别取滑块驱动力的最大值和最小值来计算两种方法仿真所得到的结果的相对误差,从而进一步验证该并联机构动力学的正确性。
在ADAMS和Matlab中分别测得滑块的最大驱动力为:
Fmax1=3.0313N
Fmax2=2.9384N
在ADAMS和Matlab中分别测得滑块的最小驱动力为:
Fmin1=-3.0391N
Fmin2=-2.9685N
则分别运用ADAMS和Matlab对动力学进行仿真求得结果的相对误差为:

由上式可知,通过两种方法分析所得到的结果的相对误差比较小,从而进一步验证了该并联机构的拉格朗日动力学模型的正确性。
4 结论
(1)建立了3-PPR并联机构的坐标系,用矢量方程图解法求解出了并联机构的运动学逆解的解析解和雅克比矩阵。
(2)在保证简化模型与实际模型一致的前提下,通过对机构模型进行一系列的简化,求解出了机构运动能量的解析解,运用拉格朗日方程法和虚功原理推导了机构的运动学方程。
(3)用Matlab软件求解机构动力学方程的理论解,绘出理论仿真图线。运用ADAMS软件对机构进行动力学仿真,对仿真结果与理论结果进行对比分析,求解出二者最大驱动力和最小驱动力的相对误差,均较小,进一步验证了该并联机构的拉格朗日动力学模型的简化方法的正确性。为机构设计和应用及实现快速控制提供理论依据。
[1] 黄真,孔令富,方跃法. 并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[2] 印松,陈竟新,唐矫燕. 基于牛顿-欧拉法的3-UPS/S并联机构动力学分析 [J].制造业自动化,2013,35(1):86-88.
[3] 郝秀清,胡福生,陈建涛. 基于牛顿-欧拉法的3PTT并联机构动力学分析及仿真[J].中国机械工程,2006,17(Z):33-36.
[4] 白志富,韩先国,陈五一. 基于Lagrange方程三自由度并联机构动力学研究[J]. 北京航天航空大学学报,2004,30(1):51-54.
[5] 宋小科,杨晓钧.基于虚功原理的4PUS-1RPU并联机构动力学分析 [J].组合机床与自动化加工技术,2012(6):25-30.
[6] 李兵,王知行,李建生.基于凯恩方程的新型并联机床动力学研究[J].机械科学与技术,1999,18(1):41-43.
[7] 李新友,陈五一,韩先国.基于Kane方程的3UPS/S并联机构动力学研究[J].机床与液压,2011,39(13):1-5.
(编辑李秀敏)
Dynamics Analysis and Simulation to 3-PPR Parallel Mechnism Based on Lagrange
ZHANG Jun1,XIE Zhi-jiang2
(1.College of Mechanical Engineering, Yangtze Normal University, Chongqing 408100,China;2.The State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044,China)
Taking the 3-PPR parallel mechanism as the researching target, by using Euler rotation matrix and vector method, the inverse kinematics solution of the parallel mechanism is deduced, the Jacobi matrix of the mechanism are solved And the theoretical foundation for the dynamic model of mechanism are provided. Using the method of Lagrange equation and the principle of virtual work established the dynamic model of the parallel mechanism. Writing the simulation program and simulating the inverse dynamics of the model by the MATLAB software. Verified the correctness of the inverse dynamics model by Comparing the relative error with the simulation results in ADAMS and Matlab software, Laying a foundation for the subsequent motion control mechanism.
parallel mechanism;dynamics model;lagrange;simulation
1001-2265(2016)08-0057-04
10.13462/j.cnki.mmtamt.2016.08.016
2015-03-01;
2015-04-08
国家自然科学基金项目(U1530138)
张军(1987— ),男,重庆人,长江师范学院助理讲师,硕士,研究方向为机械创新设计、机电一体化,(E-mail)530808282@qq.com; 谢志江(1962— ),男,湖南双峰人,重庆大学教授,博士生导师,研究方向为并联机器人、机电一体化、故障诊断。
TH166;TG659
A
