舰载声呐与航空吊放声呐协同双基地搜索范围研究
2016-09-07韩建辉杨日杰郑晓庆李大卫
韩建辉,杨日杰,郑晓庆,李大卫
舰载声呐与航空吊放声呐协同双基地搜索范围研究
韩建辉1,2,杨日杰2,郑晓庆2,李大卫2
(1. 西北工业大学航海学院,陕西西安 710072; 2. 海军航空工程学院电子信息工程系,山东烟台 264001)
针对舰载声呐与航空吊放声呐构成的异类传感器双基地工作问题,建立了基于声呐方程的海洋环境噪声背景下双基地搜索范围模型。在舰载声呐与航空吊放声呐双基地协同工作系统中,舰载声呐发射探测信号,舰载声呐和航空吊放声呐均接收水下目标回波信号。根据能量关系建立了扩展面积、扩展距离、等效半径模型,定量分析了声源级、基线长度等因素对系统搜索范围的影响。仿真结果表明,当舰载声呐声源级相对于吊放声呐声源级足够大时,协同双基地工作模式在较大的基线长度范围内不仅在搜索范围上优于舰载声呐和吊放声呐均独立工作时的单基地联合搜潜,而且在搜索宽度上也有优势。
双基地声呐;搜潜范围;航空吊放声呐;舰载声呐
0 引言
随着减震降噪、消声等技术的不断发展和制造工艺的不断升级与完善,水下目标的辐射噪声级越来越低,主动反射波越来越弱,其隐身能力得到了持续的改进。水下目标隐身能力的增强对声呐系统的搜索、检测、跟踪和目标识别等形成了巨大的挑战,使传统的吊放声呐、声呐浮标、舰壳声呐和拖曳声呐等对水下目标的探测能力明显降低,作用距离快速减小,水下目标搜索任务变得越来越困难。多基地声呐技术是应对挑战的有效方法之一,声呐接收机和发射机分置,接收机远距离接收水下目标反射回波。由于接收机不辐射声能量,水下目标难以判断其是否存在,隐蔽性好,同时可利用主动大功率声源的能量优势,提高探测距离。舰载声呐与航空吊放声呐多基地搜索是一种可行的多基地工作方式,舰载声呐发射大功率探测声信号,航空吊放声呐接收水下目标反射回波,通过机载声呐信号处理系统完成对目标的探测和定位。
文献[1]研究了海洋环境噪声背景下双基地声呐探测范围,分析了双基地的优势区域和优势角。文献[2]给出了多基地声呐在浮标布阵中的应用。文献[3]研究了多基地声呐探测范围。文献[4]对混响背景下单、双基地声呐的探测范围进行了比较。文献[5-9]研究了多基地声呐系统的传感器布设问题。在上述文献中为了简化分析常常忽略海水吸收,且常常将单个具有主被动功能传感器的发射参数和接收参数分别作为双基地声呐的收发参数,以此为基础开展研究,此时双基地声呐的最大探测范围是以收、发基地为焦点的卵形线所围面积。而实际搜索过程中异类声呐传感器联合多基地探测也是重要的搜索方式之一。异类声呐传感器多基地搜索是否可以提高水下搜索范围,其探测能力对于独立联合工作声呐具有多大优势,并没有进行定量的分析。本文以多基地声呐方程为基础,从能量关系出发,对舰载声呐与航空吊放声呐多基地搜潜进行研究,在仿真的基础上定量分析其相对于独立联合工作的探测范围和能力,对于舰载声呐与航空吊放声呐多基地水下搜索和使用具有重要的意义。
1 舰载声呐与航空吊放声呐多基地搜潜范围
1.1 双基地声呐几何配置
双基地声呐几何配置关系如图1所示。表示发射声源,它可以作为声源向水下辐射声脉冲,也可以工作在单基地模式,同时具有发射声波和接收目标回波的功能。为接收机,它与发射机分开一定的距离,以被动方式工作,其位置难以被目标确定,隐蔽性好。为水下目标。为发射机到目标的距离。为目标至接收机的距离。通常,在接收端所测量的是距离和。在双基地条件下,定义基线长度为发射机与接收机之间的距离。为在声波发射端所测量的波束指向角。为接收波束指向角。为分置角,定义为以目标为顶点,发射基地、接收基地与目标连线之间的夹角。
1.2 双基地探测范围
舰载声呐发射大功率探测声波,机载吊放声呐接收目标的反射回波。双基地声呐方程如下:

若舰载声呐和机载声呐均独立工作,则相应的舰载单基地声呐方程为

(3)

(5)
舰载声呐与航空吊放声呐构成的双基地系统等效半径[1]为。则有:
由式(6)容易看出,若舰载声呐的声源级高于吊放声呐的声源级,双基地系统等效半径大于吊放声呐单基地作用距离。
式(6)确定的轨迹是以发射机和接收机为焦点的卡西尼卵形线,当发射机与接收机位于同一位置时,探测范围是半径为的圆;当发射机与接收机相距大于时,探测范围分裂为两个封闭区域。图2给出了不同基线距离条件下双基地系统的探测范围。
假设舰载声呐单基地工作半径等于双基地声呐系统等效半径。双基地扩展面积定义为双基地覆盖范围减去其与舰载声呐单基地工作覆盖范围交叠部分后剩下的面积。图3给出了扩展面积示意图,图中左侧为舰载声呐单基地工作覆盖范围,卵形线为双基地覆盖范围,虚线所围面积即为双基地扩展面积。
以舰载声呐和吊放声呐基线中点作为极点,以基线为极轴建立极坐标系,对双基地搜索面积进行积分求解[1],利用三角关系和积分因子幂级数展开得到搜索面积和扩展面积。
(8)
(10)
考虑到球面波传播损失和海水吸收损失,
(13)
由于考虑了海水吸收损失,作用距离相对未考虑时下降,相应的有效覆盖面积也降低,其覆盖范围类似于卡西尼卵形线。当接收机和发射机位于同一位置时,覆盖范围为圆形,随着接收机距离发射机越来越远,覆盖范围封闭曲线开始逐渐扭曲,最终分离为两个独立的封闭区域。与未考虑海水吸收损失时类似,此时的双基地等效半径即为双基地覆盖范围开始发生扭曲时基线长度的一半,即
解方程可得:
(15)
2 仿真分析
2.1 不考虑声吸收的理想情况下协同双基地搜索范围仿真
不考虑声吸收,假设舰载声呐单基地工作半径等于双基地声呐系统等效半径,为发射机和接收机距离,归一化基线距离为发射机和接收机间的距离与双基地声呐系统等效半径的比值。取值范围为1~5。为舰载声呐发射声源级与吊放声呐发射声源级之差,取值范围为[0,20],单位为dB。吊放声呐作用范围为,舰载声呐与吊放声呐构成的协同双基地系统的扩展面积为,扩展面积比。不考虑海水吸收情况,图4给出了扩展面积比随归一化基线距离和声源级差的变化关系。从图中可以看出,当声源级差一定、且时,扩展面积随着基线距离的增加而增加,当时,扩展面积随着基线距离的增加而迅速减小。当声源级差比较小时,面积比小于1,此时扩展面积相对于吊放声呐探测范围没有增加,而随着声源级差的增加,面积比超过1,且声源级差越大,增加速度越快。
2.2 考虑海水声吸收时协同双基地搜索范围仿真
舰载声呐作为主动声源发射探测信号,机载吊放声呐与舰载声呐同时接收水下目标回波信号,构成双基地工作方式,这里称为双基地协同工作模式。采用数值解法分别仿真不同舰载声呐声源级条件下协同双基地声呐工作覆盖范围与双基地扩展面积。
由公式(15)可得到双基地等效半径。图5(a)给出了舰载声呐声源级取230 dB、基线距离分别取1~2.5倍等效半径时,双基地声呐的工作覆盖范围,图5(b)给出了相应的扩展面积比。此时双基地等效半径为30743 m。基线距离采用双基地等效距离归一化,扩展面积指双基地协同工作模式覆盖范围与舰载声呐独立工作覆盖范围之差,扩展面积比定义为扩展面积与吊放声呐单基地工作覆盖范围的比值,即归一化双基地扩展面积。扩展面积比大于1,则协同双基地的搜索范围大于舰载声呐和吊放声呐单基地工作范围,协同双基地工作搜索范围存在优势,若扩展面积比小于1,则搜索范围优势丧失。
(a) 舰载声呐与吊放声呐双基地工作覆盖范围对比,SL=230 dB
(b) 归一化双基地扩展面积比,SL=230 dB
图5 双基地工作范围和扩展面积比(V=230 dB)
Fig.5 Operation region and extended area ratio of bistaic sonar (SL=230 dB)
由图5(a)可知,随着吊放声呐距离舰载发射源越来越远,双基地声呐覆盖范围越来越小,当大于2倍等效半径后覆盖范围分裂为两个独立区域,此后双基地覆盖范围随着基线长度增加迅速降低。由图5(b)可知,随着基线距离的增加,双基地协同工作模式下扩展面积先增加后减小,基线距离为1.8时,扩展面积达到最大值,为吊放声呐单独工作覆盖范围的1.93倍,基线距离在1.1~2.2范围内,扩展面积均大于吊放声呐独立工作面积,在该基线范围内协同双基地工作均可获得搜索面积优势。
(a) 舰载声呐与吊放声呐双基地工作覆盖范围对比,SL=220 dB
(b) 归一化双基地扩展面积比,SL=220 dB
图6 双基地工作范围和扩展面积比(SL=220 dB)
Fig.6 Operation region and extended area ratio of bistaic sonar (SL=220 dB)
当舰载声呐声源级高于机载吊放声呐声源级较大时,双基地协同工作模式在较大的基线分布范围内相对于舰载声呐和机载吊放声呐独立工作均有搜索范围优势,在优势基线范围内扩展面积比先增加后减小,而当舰载声呐声源级高于机载吊放声呐声源级较小时,双基地协同工作模式搜索范围优势逐渐减小,甚至丧失。
(a) 舰载声呐与吊放声呐双基地工作覆盖范围对比,SL=210 dB
(b) 归一化双基地扩展面积比,SL=210 dB
图7 双基地工作范围和扩展面积比(SL=210 dB)
Fig.7 Operation region and extended area ratio of bistaic sonar (SL=210 dB)

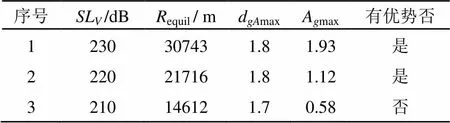
表1 参数对比
3 结语
本文从能量关系出发分析了舰载声呐与航空吊放声呐协同双基地工作时的覆盖范围,给出了覆盖面积的理论计算公式,比较了该工作模式与舰载声呐和机载吊放声呐独立工作的优势,仿真结果表明,当舰载声呐声源级相对于吊放声呐声源级足够大时,双基地协同工作模式在较大的基线分布范围内不仅在搜索范围上优于单基地联合搜潜,而且在搜索宽度上也有优势,当舰载声呐声源级为230 dB时协同双基地工作最大扩展面积可达到吊放声呐独立工作搜索面积的1.93倍。但舰载声呐声源级不够高时,双基地协同工作模式搜索范围优势丧失,当舰载声呐声源级为210 dB时的协同双基地工作最大扩展面积仅为吊放声呐独立工作搜索面积的0.58倍。本文假设目标强度在空间上是各向均匀的,关于水下目标强度对舰机双基地协同工作的影响需要进一步的研究。
[1] 杨丽, 蔡志明. 双基地声呐探测范围分析[J]. 兵工学报, 2007, 28(7): 839-843.
YANG Li, CAI Zhiming. An analysis on the detectable region for bistatic Sonars[J]. Acta Armamentarii, 2007, 28(7): 839-843.
[2] 凌青,杨丽,蔡志明. 双(多)基地声呐浮标系统在反潜中的应用研究[J]. 海军工程大学学报, 2006, 18(2): 47-51.
LING Qing, YANG Li, CAI Zhiming. Application of bistatic(multistatic) sonar array on anti submarine[J]. Journal of Navy University of Engineering, 2006, 18(2): 47-51.
[3] 杨日杰, 何友, 孙明太. 主/被动联合多基地航空搜潜范围分析[J].航空学报, 2004, 25(4): 381-384.
YANG Rijie, HE You, SUN Mingtai. Analysis for active/passive combined multi-base air anti-submarine[J]. Acta Aeronautica et Astronautica Sinica, 2004, 25(4):381-384 .
[4] 杨丽, 蔡志明. 混响背景下双基地声呐的探测范围分析[J].哈尔滨工程大学学报, 2006, 27(4): 597-602.
YANG Li, CAI Zhiming. Analysis of detectable region for the bistatic sonar in reverberation background[J]. Journal of Harbin Engineering University, 2006, 27(4): 597-602.
[5] 顾晓东, 邱志明, 袁志勇. 多基地声呐接收机最优布阵的探讨.兵工学报, 2008, 29(3): 287-290.
GU Xiaodong, QIU Zhiming, YUAN Zhiyong. A study of optimal array distribution for multistatic sonar receiver[J]. Acta Armamentarii, 2008, 29(3): 287-290.
[6] 李襄, 孙长瑜, 余华兵, 等. 多基地声呐配置策略研究.兵工学报,2009, 30(6):844-848.
LI Xiang, SUN Changyu, YU Huabing, et al. Research on the deployment strategy of multistatic sonar[J]. Acta Armamentarii, 2009, 30(6):844-848.
[7] NGATCHOU P N, FOX W L J, El-Sharkawi M A. Multiobjective multistatic sonar sensor placement[C]//2006 IEEE Congress on Evolutionary Computation, CEC 2006, July 16,2006-July 21,2006. Vancouver, BC, Canada: Inst. of Elec. and Elec. Eng. Computer Society, 2006: 2713-2719.
[8] ERDINC O, WILLETT P, Coraluppi S. Multistatic sensor placement: A tracking approach[C]//2006 9th International Conference on Information Fusion, FUSION, July 10, 2006-July 13, 2006. Florence, Italy: Inst. of Elec. and Elec. Eng. Computer Society, 2006.
[9] THARMARASA R, LANG T, KIRUBARAJAN T. Joint path planning and sensor subset selection for multistatic sensor networks[C]//Signal and Data Processing of Small Targets 2008, March 18, 2008-March 20, 2008. Orlando, FL, United states: SPIE, 2008: 6969, The International Society for Optical Engineering (SPIE).
Search area of cooperative bistatic system consisting of shipboard sonar and aerial dipping sonar
HAN Jian-hui1,2, YANG Ri-jie2, ZHENG Xiao-qing2, LI Da-wei2
(1. College of Marine Engineering, Northwestern Polytechnic University, Xi’an 710072, Shaanxi, China;2. Department of Electronic Information Engineering, Naval Aeronautical Astronautical University, Yantai 264001, Shandong,China)
Aim at the operation problem of heterogeneous sensor bistatic system consisting of shipboard sonar and dipping sonar, a bistatic search model based on the sonar equation under ocean ambient noise is established. In the bistatic cooperative system, both shipboard sonar and dipping sonar receive underwater target echo signal, but the detection signal is transmitted by shipboard sonar. Based on energy relationship, the extended search area, range and equivalent radius of bistatic cooperative system consisting of shipboard sonar and aerial dipping sonar are modeled. Influences of factors such as source level and baseline length on the search area of the system are analyzed. Simulation results show that when source level of shipboard is high enough compared with dipping sonar, the bistatic cooperative system outperforms monostatic cooperative system not only in search area but also in search width.
bistatic sonar, searching area, aerial dipping sonar, shipboard sonar
TB566
A
1000-3630(2016)-02-0114-06
10.16300/j.cnki.1000-3630.2016.02.006
2015-05-04;
2015-08-04
国家自然科学基金(61271444)、“泰山学者”建设工程专项经费资助项目(2011)
韩建辉(1981-), 男, 安徽肥东人, 讲师, 博士后, 研究方向为水声对抗、水声信号处理。
韩建辉, E-mail:hanjianhui01@163.com