基于车载电子标签数据的单交叉口状态判别研究
2016-09-07刘云翔
刘云翔,贾 璐,朱 萍
(上海应用技术学院 计算机科学与信息工程学院,上海 201418)
基于车载电子标签数据的单交叉口状态判别研究
刘云翔,贾璐,朱萍
(上海应用技术学院 计算机科学与信息工程学院,上海201418)
基于目前交叉口状态判别存在设备安装复杂度高,判别准确率低,受环境影响大、无法识别具体车辆等问题,提出基于车载电子标签数据的交叉口状态判别方法;通过简化模型,以两相位单交叉口为例,选择的参数为流量,交通密度,停车数量;最后经VISSIM交通仿真软件的二次开发,模拟车载电子标签运行环境,通过对比仿真试验所得与专家观察分析所得,相似度高达90%以上;证明该方法在克服以往方法缺陷的基础上可有效判别交叉口状态。
智能交通;交通流量;交通密度;停车数量;状态判别
Shanghai201418,China)
0 引言
城市的发展与道路交通状态息息相关,道路交通拥挤状态是指交通流的总体运行状况,是用各区间的交通参数所表示的交通流状态,包括宏观路网交通状态、微观路段和交叉口交通状态。交通状态的判别可以为交通的控制与诱导做好准备。而由于交通的复杂性,变化性等特点给道路交通状态判别[1-2]带来一定的困难,至今交通状态的判别没有明确的标准。一般对于交通判别有两种,一是人工被动判别,一是自动主动判别。近年来,随着技术的发展,越来越倾向于主动判别,主动判别有基于固定检测器、移动监测器、多源检测器等方法。各自有相应的算法,没有一种算法的绩效完全优于其他算法。而由于移动式检测设备的兴起,交通状态的判别越来越倾向于基于移动设备。移动设备目前主要使用的有GPS与GIS,车载电子标签与车牌判别等等[3-5]。每种判别的适合领域不一样。本文主要阐述基于车载电子标签的状态判别。
1 结构设计
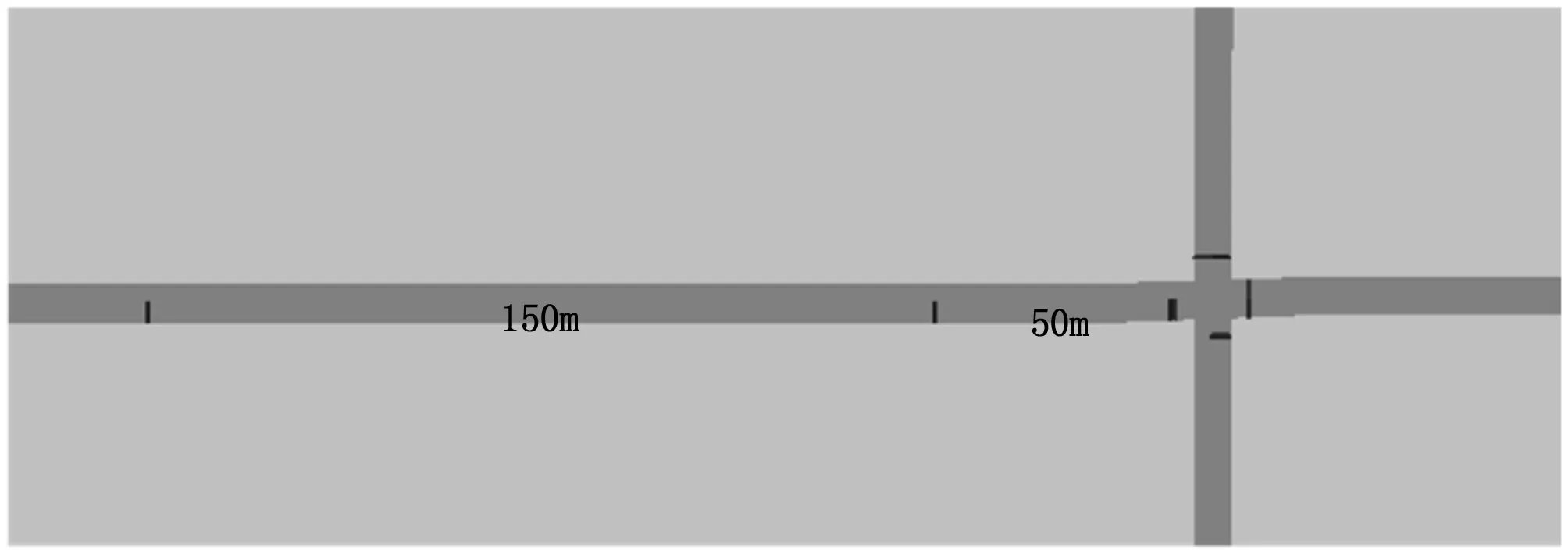
在交叉口的设备安装情况[6]如图1。模型简化为单交叉口直行,相位为两相位。在距离交叉口50m地方安装背靠背式阅读器(以下简称Reader),通过调整阅读器两边的内部天线发射的频率,控制检测范围为靠近交叉口两端200m(交叉口方向50m,背离交叉口方向150m)。通过与交叉口信号灯之间的通信,在了解信号周期的基础上结合标签数据进行判别。
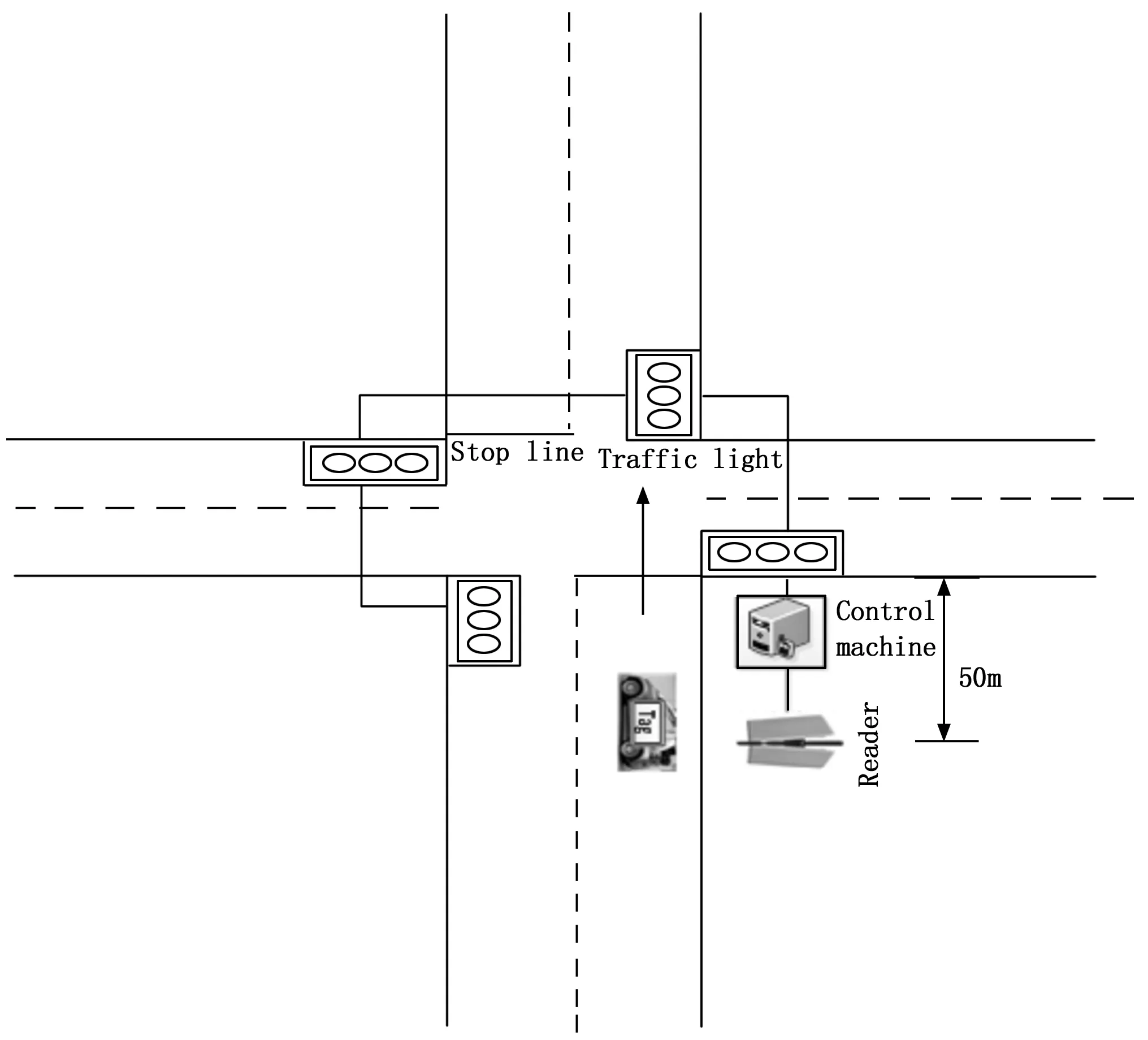
图1 基于车载电子标签的交通状态判别路口设计图
2 基于参数的算法设计
2.1参数选择
以往交通拥挤自动判别(automaticcongestionidentification,ACI)算法中通常采用的参数见表1,表中“**”表示其中参数可以任选其一。从表中可见算法大多采用一个交通参数,其中使用较多的为交通量与占有率。原因与参数的获取难易,对交通的敏感度等有关。
而对于车载电子标签,有的参数可以直接获取,有的只能间接获取,而有的则无法获取,具体参数的获取情况见下表2。综合这两个方面的原因选择了适合本文判别方法的参数:选择对交通状态敏感的交通量与交通密度为参数,为了排除停车对交通状态的误判别,这里新增停车数量。

表1 各算法通常采用的数据
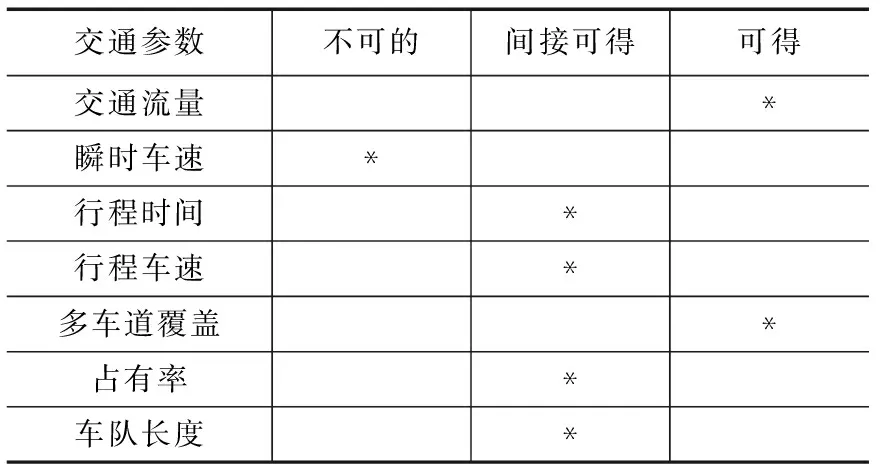
表2 车载电子标签的参数获取情况表
2.2参数定义
流量Q[2]:
(1)
其中:T为观测时段的长度(h);N为观测时段内的车辆数(veh)。
流量指标最大的优点是数据获取容易。在Tag下的流量我们将令T=1,则Q=N。
交通密度K[2]:
(2)
其中:S为车辆数(veh);l为观测路段的长度(km)。
交通密度是一个能直观体现道路上车辆密集程度的指标,能够弥补单独使用流量参数的缺陷。以往获取交通密度的实测数据存在较大难度。这里设观测路段的长度设为一个单位,则上述公式变为K=S。
停车数量:在交通状态畅通的情况下,连续两个绿灯周期检测到相同的车辆,这些车辆数量即为停车数量。
(3)
其中:SJ为连续两个绿灯周期检测到的相同车辆数(veh);
2.3模型设计与算法
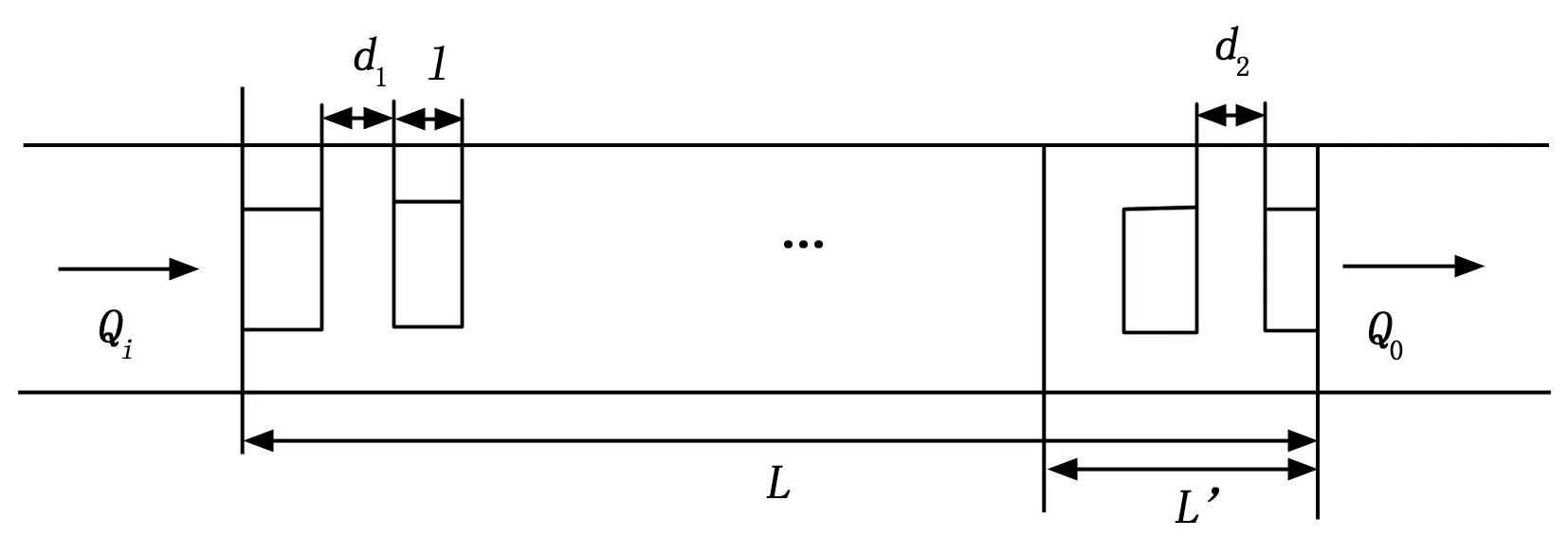
图2 检测区间车辆模型图
如上图所示,假设车辆长度l,在正常情况下车间距离为d1,在排队情况下车间距离为d2,整个路段的距离为L,靠近交叉口方向检测的距离为L′,进入的检测区间的车流为Qi,离开的车流为Qo:
(4)
其中:Qmax为最大的离开车子流量为Tg为该方向上绿灯的时间。
(5)
其中:KLL为路段正常行驶时的最大密度。
(6)
其中:KLH为交通路段的排队时最大的密度。
(7)
其中:K50max为靠近交叉口50m的最大密度。
将经过两个绿灯周期还有相同的车辆的数量记为停车数量[7-8],停车数量公式如下:
(8)
针对连续两个绿灯周期作如下定义。
定义1:严重拥堵:第二个绿灯周期K2>KLH。
定义2:拥堵:两个绿灯周期KLL 定义3:一般拥堵:第二绿灯周期KLL 定义4:畅通:第二绿灯周期K2≤KLL,J=0。 定义5:停车:第二绿灯周期K2≤KLL,J≠0。 图3 交通状态判别算法流程图 图4 交通状态判别的流程图 用VISSIM软件对交叉口进行仿真。为了仿真从更客观的角度反映问题的本质,该仿真做了如下假设: 1)交叉口仅为单交叉口,相位为两相位; 2)驾驶员不存在看到绿灯不行使的状态; 3)安全事故不存在; 4)观测道路上车辆仅为小轿车; 5)检测道路为单车道。 利用检测线圈模拟位于交叉口两端的接收机接收范围。分别仿真车流量在200,400,600,800,1 000,1 200时的交叉口交通状态。仿真时间3 600s其中含有600s的暖机时间,随机数种子选择42。仿真图如图5所示[9]。其中包括交叉口信号灯和数据采集点,左边三条构成交叉口左边50m,150m的检测范围。信号周期为60s,为了仿真的便捷,不设黄灯时间,仅设全红时间5s。 图5 仿真实验图 仿真结果将数据分为10个一组,求出平均值,将所得结果与请10位观察者在相同时间观察后打分的结果作比较,比较结果如图6。 图6 实验结果对比图 实验结果图的上面部分为专家组的判别结果,下面部分为算法判别结果。其中每张图从左至右分别是交通情况为200veh/h,400veh/h,600veh/h,800veh/h,1 000veh/h, 1 200veh/h时的交通状态判别结果。实验结果显示,利用交通量、交通密度,停车数量可以较好的判别交叉口交通状态,尤其在调整算法后能较好的克服交通软件VISSIM在判别严重拥堵时的缺陷,更好的判别了交叉口严重拥堵的状态。在与10组专家打分比较中,比较结果表见表3,表4。 表3 误差分析表1 表4 误差分析表2 从误差分析表可得该算法判别结果的准确度较高,在90%以上。并且经过适应软件的修正后在严重拥堵情况下判别率几乎为零。误差的来源主要集中于一般拥堵与拥堵的状态,原因主要为判别等级划分细度不够。专家组存在一定人为因素干扰,在等级细度划分不够的情况下,该干扰将尤其明显,特别是在临界点地方。但总体认为实验结果可信,利用车载电子标签获得的交通流量、交通密度和停车数量的参数数据,以及配合交叉口信号灯状态可以较好的判别交叉口的交通状态。 基于车载电子标签数据的交叉口状态判别,利用tag、reader、控制机与信号灯组组成的联动体系,获得的交通流量、交通密度和停车数量等参数数据,再配合交叉口绿灯周期,可以较好的判别交叉口的状态。数值仿真结果与专家判别结果对比,相似度高达90%以上,在严重拥堵状态下的相似度高达100%。证明该方法可有效判别交叉口状态。但当交叉口车道不为单车道,相位也增加至超过两相位时,该判别方法的准确度还需进一步验证。 [1]张新等.基于视频投影法的交通拥挤实时检测算法[J]. 合肥工业大学学报(自然科学版), 2013(3): 319-323. [2]胡启洲,等.城市路网交通拥堵态势监控的测度理论与方法[M].北京: 科学出版社, 2013. [3]但雨芳,马庆禄.RFID,GPS和GIS技术集成在交通智能监管系统中的应用研究[J]. 计算机应用研究,2009,12:4628-4630. [4]赖锴,米慧超. 基于RFID的未知标签检测协议研究[J]. 计算机应用研究,2015(3):814-820. [5]MandalK,SenA,ChakrabortyA,etal.RoadtrafficcongestionmonitoringandmeasurementusingactiveRFIDandGSMtechnology[A].IntelligentTransportationSystems(ITSC), 2011 14thInternationalIEEEConferenceon[C],pp.1375-1379, 2011. [6]邢磊. 车辆检测技术研究[D]. 重庆: 重庆大学, 2013.. [7]晏承玲.基于模糊理论的城市道路交通状态判别研究[D].重庆:重庆大学,2013. [8]孙晓亮.城市道路交通状态评价和预测方法及应用研究[Z].北京:北京交通大学,2013. [9]VISSIM5.20 用户手册[Z].Karlsruhe,Germany. 2009PTVAG. StudyonsingleIntersectionStateIdentificationBasedonVehicleElectronicTagData LiuYunxiang,JiaLu,ZhuPing (SchoolofComputerScienceandInformationEngineering,ShanghaiInstituteofAppliedTechnology, Duetothecurrentintersectionstateidentificationexitssomeproblems,suchashighconfusedequipmentinstallation,lowaccuracyrateeasilyaffectbythecircumstance,sensitiveparametersaredifficulttoobtain,andsoon.Trafficcongestionidentificationdesignbasedonvehicleelectronictagdataisproposed.Taketwophasesingleintersectionasanexample,selectthetrafficflow,trafficdensity,parkingnumberasparametersfortraffic.ThesimulationenvironmentisbuiltbyVISSIMwithsecondarydevelopment.Bycomparingthesimulationresultswiththeanalysisoftheresultsobtainedfromtheexperts,thedegreeofsimilarityishigherthan90%.Itisprovedthatthismethodcaneffectivelydistinguishtheintersectionstate. intelligenttransportation;trafficflow;trafficdensity;parkingnumber;statediscrimination 2015-08-30; 2015-09-06。 上海市科委重点支撑项目(12510503800)。 刘云翔(1964-),男,上海人,工学博士,主要从事人工智能、计算机软件与理论、信息融合、智能信息处理等领域方向的研究。 贾璐(1991-),女,江苏无锡人,研究生,主要从事智能检测与控制方向的研究。 1671-4598(2016)01-0277-04DOI:10.16526/j.cnki.11-4762/tp.2016.01.077 TB114.3 A
3 仿真结果与分析



4 结论
